 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBXRL: Behavior-Explainable Reinforcement Learning
Mar 24, 2026A major challenge of Reinforcement Learning is that agents often learn undesired behaviors that seem to defy the reward structure they were given. Explainable Reinforcement Learning (XRL) methods can answer queries such as "explain this specific action", "explain this specific trajectory", and "explain the entire policy". However, XRL lacks a formal definition for behavior as a pattern of actions across many episodes. We provide such a definition, and use it to enable a new query: "Explain this behavior". We present Behavior-Explainable Reinforcement Learning (BXRL), a new problem formulation that treats behaviors as first-class objects. BXRL defines a behavior measure as any function $m : Π\to \mathbb{R}$, allowing users to precisely express the pattern of actions that they find interesting and measure how strongly the policy exhibits it. We define contrastive behaviors that reduce the question "why does the agent prefer $a$ to $a'$?" to "why is $m(π)$ high?" which can be explored with differentiation. We do not implement an explainability method; we instead analyze three existing methods and propose how they could be adapted to explain behavior. We present a port of the HighwayEnv driving environment to JAX, which provides an interface for defining, measuring, and differentiating behaviors with respect to the model parameters.
Truthfulness Despite Weak Supervision: Evaluating and Training LLMs Using Peer Prediction
Jan 28, 2026The evaluation and post-training of large language models (LLMs) rely on supervision, but strong supervision for difficult tasks is often unavailable, especially when evaluating frontier models. In such cases, models are demonstrated to exploit evaluations built on such imperfect supervision, leading to deceptive results. However, underutilized in LLM research, a wealth of mechanism design research focuses on game-theoretic incentive compatibility, i.e., eliciting honest and informative answers with weak supervision. Drawing from this literature, we introduce the peer prediction method for model evaluation and post-training. It rewards honest and informative answers over deceptive and uninformative ones, using a metric based on mutual predictability and without requiring ground truth labels. We demonstrate the method's effectiveness and resistance to deception, with both theoretical guarantees and empirical validation on models with up to 405B parameters. We show that training an 8B model with peer prediction-based reward recovers most of the drop in truthfulness due to prior malicious finetuning, even when the reward is produced by a 0.135B language model with no finetuning. On the evaluation front, in contrast to LLM-as-a-Judge which requires strong and trusted judges, we discover an inverse scaling property in peer prediction, where, surprisingly, resistance to deception is strengthened as the capability gap between the experts and participants widens, enabling reliable evaluation of strong models with weak supervision. In particular, LLM-as-a-Judge become worse than random guess when facing deceptive models 5-20x the judge's size, while peer prediction thrives when such gaps are large, including in cases with over 100x size difference.
Focused Skill Discovery: Learning to Control Specific State Variables while Minimizing Side Effects
Oct 06, 2025


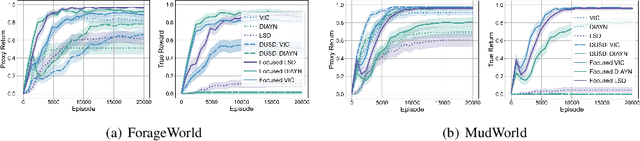
Skills are essential for unlocking higher levels of problem solving. A common approach to discovering these skills is to learn ones that reliably reach different states, thus empowering the agent to control its environment. However, existing skill discovery algorithms often overlook the natural state variables present in many reinforcement learning problems, meaning that the discovered skills lack control of specific state variables. This can significantly hamper exploration efficiency, make skills more challenging to learn with, and lead to negative side effects in downstream tasks when the goal is under-specified. We introduce a general method that enables these skill discovery algorithms to learn focused skills -- skills that target and control specific state variables. Our approach improves state space coverage by a factor of three, unlocks new learning capabilities, and automatically avoids negative side effects in downstream tasks.
Benchmarking Partial Observability in Reinforcement Learning with a Suite of Memory-Improvable Domains
Jul 31, 2025Mitigating partial observability is a necessary but challenging task for general reinforcement learning algorithms. To improve an algorithm's ability to mitigate partial observability, researchers need comprehensive benchmarks to gauge progress. Most algorithms tackling partial observability are only evaluated on benchmarks with simple forms of state aliasing, such as feature masking and Gaussian noise. Such benchmarks do not represent the many forms of partial observability seen in real domains, like visual occlusion or unknown opponent intent. We argue that a partially observable benchmark should have two key properties. The first is coverage in its forms of partial observability, to ensure an algorithm's generalizability. The second is a large gap between the performance of a agents with more or less state information, all other factors roughly equal. This gap implies that an environment is memory improvable: where performance gains in a domain are from an algorithm's ability to cope with partial observability as opposed to other factors. We introduce best-practice guidelines for empirically benchmarking reinforcement learning under partial observability, as well as the open-source library POBAX: Partially Observable Benchmarks in JAX. We characterize the types of partial observability present in various environments and select representative environments for our benchmark. These environments include localization and mapping, visual control, games, and more. Additionally, we show that these tasks are all memory improvable and require hard-to-learn memory functions, providing a concrete signal for partial observability research. This framework includes recommended hyperparameters as well as algorithm implementations for fast, out-of-the-box evaluation, as well as highly performant environments implemented in JAX for GPU-scalable experimentation.
Mitigating Partial Observability in Sequential Decision Processes via the Lambda Discrepancy
Jul 10, 2024



Reinforcement learning algorithms typically rely on the assumption that the environment dynamics and value function can be expressed in terms of a Markovian state representation. However, when state information is only partially observable, how can an agent learn such a state representation, and how can it detect when it has found one? We introduce a metric that can accomplish both objectives, without requiring access to--or knowledge of--an underlying, unobservable state space. Our metric, the $\lambda$-discrepancy, is the difference between two distinct temporal difference (TD) value estimates, each computed using TD($\lambda$) with a different value of $\lambda$. Since TD($\lambda$=0) makes an implicit Markov assumption and TD($\lambda$=1) does not, a discrepancy between these estimates is a potential indicator of a non-Markovian state representation. Indeed, we prove that the $\lambda$-discrepancy is exactly zero for all Markov decision processes and almost always non-zero for a broad class of partially observable environments. We also demonstrate empirically that, once detected, minimizing the $\lambda$-discrepancy can help with learning a memory function to mitigate the corresponding partial observability. We then train a reinforcement learning agent that simultaneously constructs two recurrent value networks with different $\lambda$ parameters and minimizes the difference between them as an auxiliary loss. The approach scales to challenging partially observable domains, where the resulting agent frequently performs significantly better (and never performs worse) than a baseline recurrent agent with only a single value network.
Evidence of Learned Look-Ahead in a Chess-Playing Neural Network
Jun 02, 2024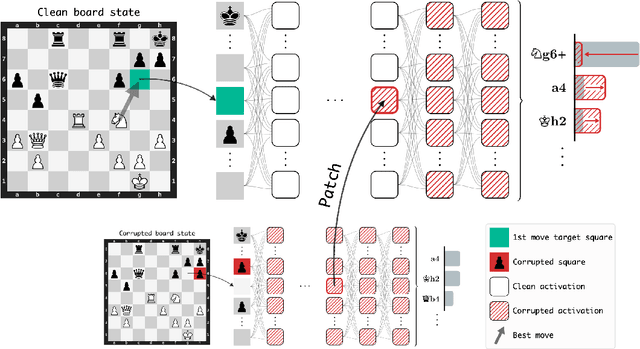
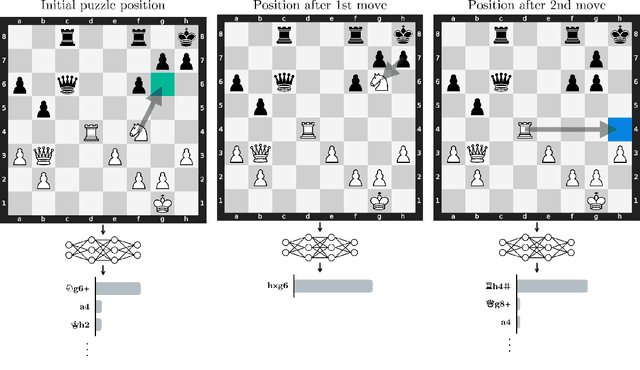
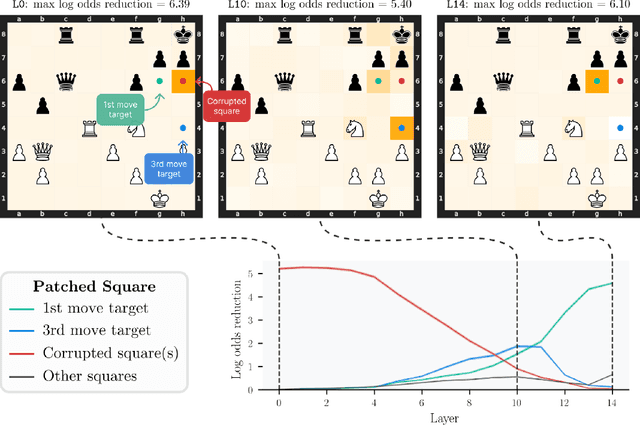
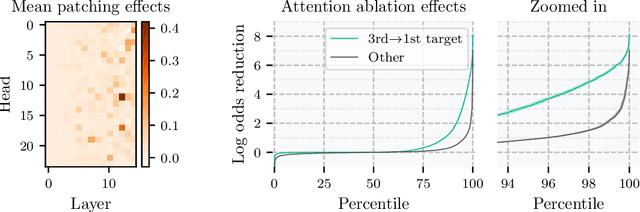
Do neural networks learn to implement algorithms such as look-ahead or search "in the wild"? Or do they rely purely on collections of simple heuristics? We present evidence of learned look-ahead in the policy network of Leela Chess Zero, the currently strongest neural chess engine. We find that Leela internally represents future optimal moves and that these representations are crucial for its final output in certain board states. Concretely, we exploit the fact that Leela is a transformer that treats every chessboard square like a token in language models, and give three lines of evidence (1) activations on certain squares of future moves are unusually important causally; (2) we find attention heads that move important information "forward and backward in time," e.g., from squares of future moves to squares of earlier ones; and (3) we train a simple probe that can predict the optimal move 2 turns ahead with 92% accuracy (in board states where Leela finds a single best line). These findings are an existence proof of learned look-ahead in neural networks and might be a step towards a better understanding of their capabilities.
Characterizing the Action-Generalization Gap in Deep Q-Learning
May 11, 2022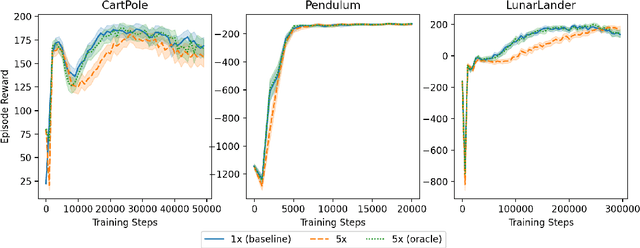
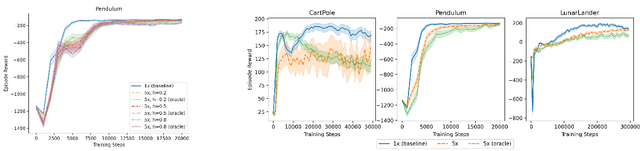
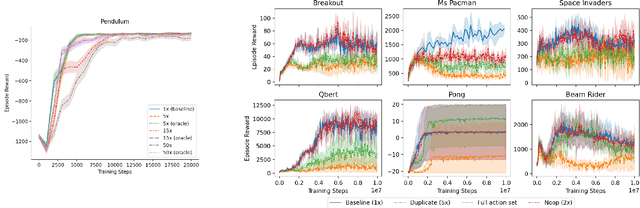
We study the action generalization ability of deep Q-learning in discrete action spaces. Generalization is crucial for efficient reinforcement learning (RL) because it allows agents to use knowledge learned from past experiences on new tasks. But while function approximation provides deep RL agents with a natural way to generalize over state inputs, the same generalization mechanism does not apply to discrete action outputs. And yet, surprisingly, our experiments indicate that Deep Q-Networks (DQN), which use exactly this type of function approximator, are still able to achieve modest action generalization. Our main contribution is twofold: first, we propose a method of evaluating action generalization using expert knowledge of action similarity, and empirically confirm that action generalization leads to faster learning; second, we characterize the action-generalization gap (the difference in learning performance between DQN and the expert) in different domains. We find that DQN can indeed generalize over actions in several simple domains, but that its ability to do so decreases as the action space grows larger.
Coarse-Grained Smoothness for RL in Metric Spaces
Oct 23, 2021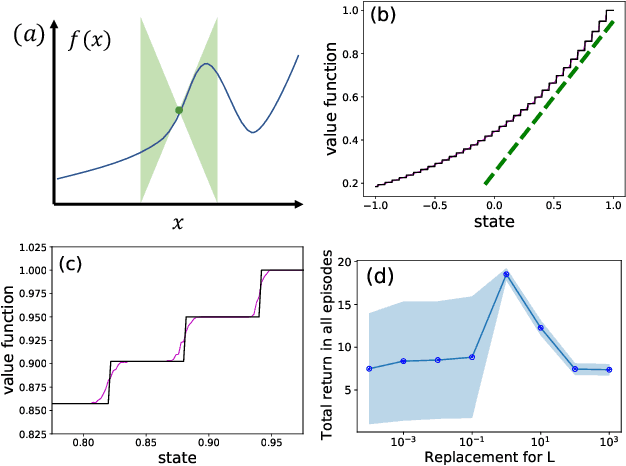
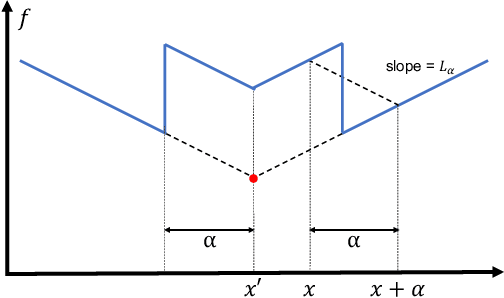
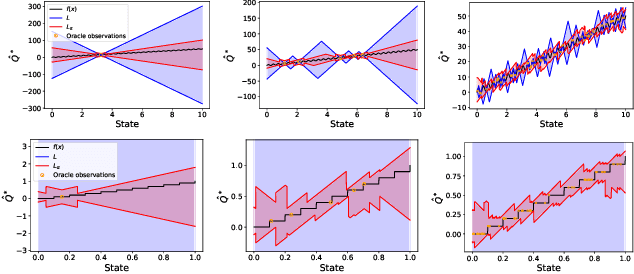
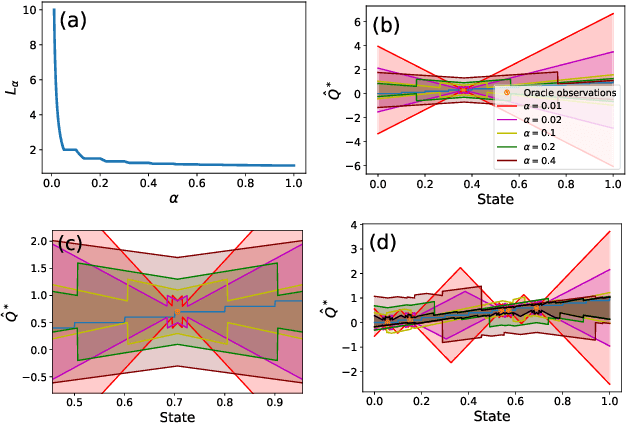
Principled decision-making in continuous state--action spaces is impossible without some assumptions. A common approach is to assume Lipschitz continuity of the Q-function. We show that, unfortunately, this property fails to hold in many typical domains. We propose a new coarse-grained smoothness definition that generalizes the notion of Lipschitz continuity, is more widely applicable, and allows us to compute significantly tighter bounds on Q-functions, leading to improved learning. We provide a theoretical analysis of our new smoothness definition, and discuss its implications and impact on control and exploration in continuous domains.
Bad-Policy Density: A Measure of Reinforcement Learning Hardness
Oct 07, 2021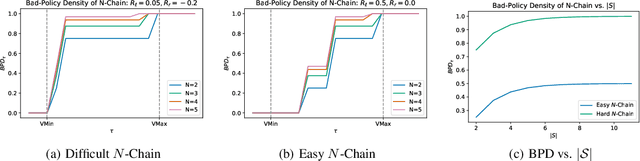
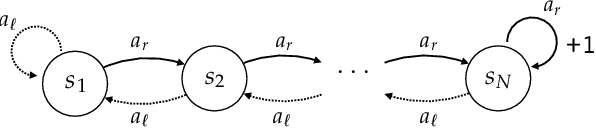
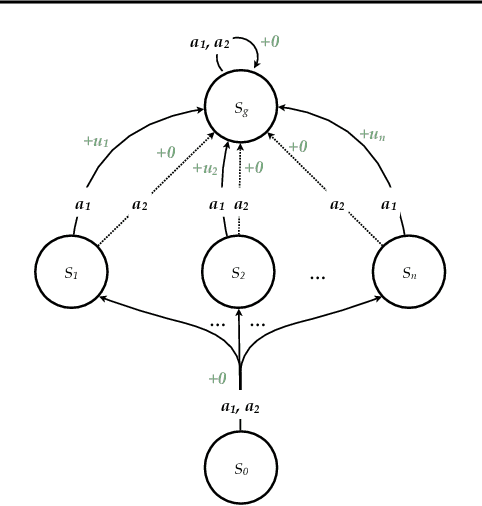
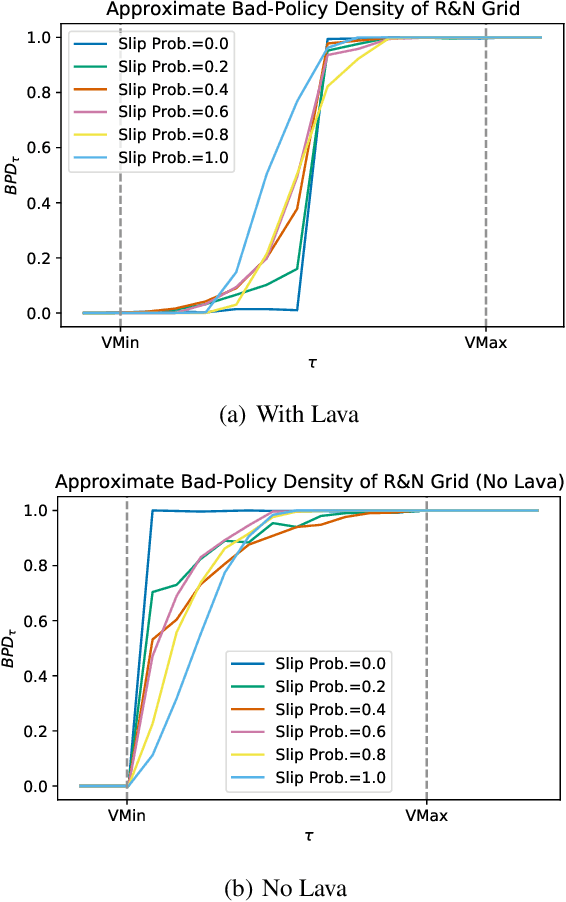
Reinforcement learning is hard in general. Yet, in many specific environments, learning is easy. What makes learning easy in one environment, but difficult in another? We address this question by proposing a simple measure of reinforcement-learning hardness called the bad-policy density. This quantity measures the fraction of the deterministic stationary policy space that is below a desired threshold in value. We prove that this simple quantity has many properties one would expect of a measure of learning hardness. Further, we prove it is NP-hard to compute the measure in general, but there are paths to polynomial-time approximation. We conclude by summarizing potential directions and uses for this measure.
Learning Markov State Abstractions for Deep Reinforcement Learning
Jun 08, 2021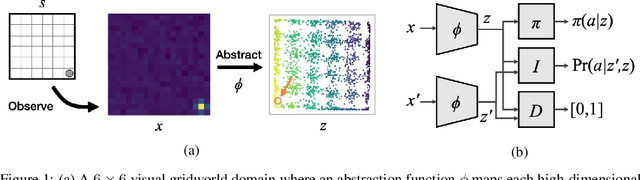
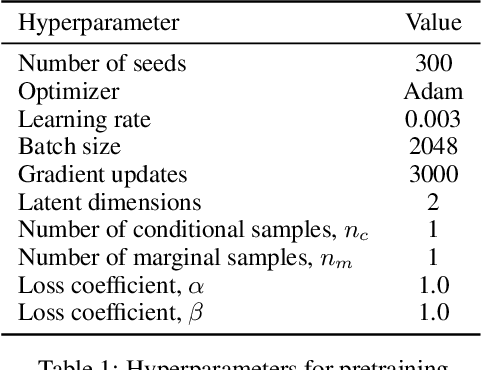
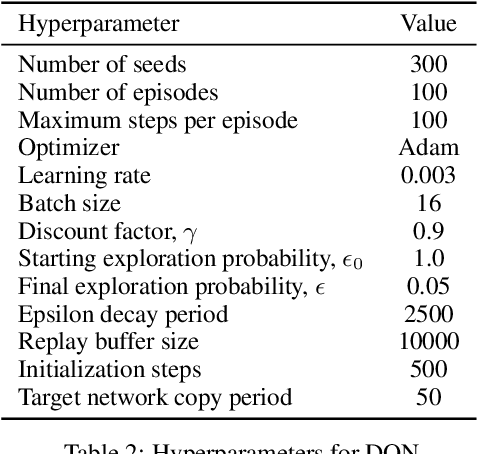
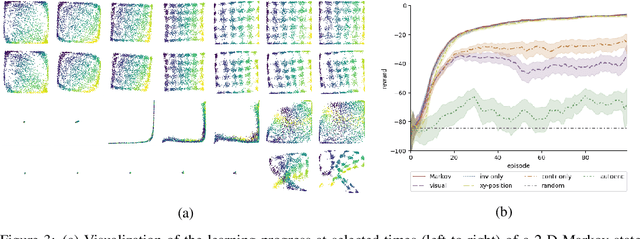
The fundamental assumption of reinforcement learning in Markov decision processes (MDPs) is that the relevant decision process is, in fact, Markov. However, when MDPs have rich observations, agents typically learn by way of an abstract state representation, and such representations are not guaranteed to preserve the Markov property. We introduce a novel set of conditions and prove that they are sufficient for learning a Markov abstract state representation. We then describe a practical training procedure that combines inverse model estimation and temporal contrastive learning to learn an abstraction that approximately satisfies these conditions. Our novel training objective is compatible with both online and offline training: it does not require a reward signal, but agents can capitalize on reward information when available. We empirically evaluate our approach on a visual gridworld domain and a set of continuous control benchmarks. Our approach learns representations that capture the underlying structure of the domain and lead to improved sample efficiency over state-of-the-art deep reinforcement learning with visual features -- often matching or exceeding the performance achieved with hand-designed compact state information.