 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMeasuring AI Ability to Complete Long Tasks
Mar 18, 2025Despite rapid progress on AI benchmarks, the real-world meaning of benchmark performance remains unclear. To quantify the capabilities of AI systems in terms of human capabilities, we propose a new metric: 50%-task-completion time horizon. This is the time humans typically take to complete tasks that AI models can complete with 50% success rate. We first timed humans with relevant domain expertise on a combination of RE-Bench, HCAST, and 66 novel shorter tasks. On these tasks, current frontier AI models such as Claude 3.7 Sonnet have a 50% time horizon of around 50 minutes. Furthermore, frontier AI time horizon has been doubling approximately every seven months since 2019, though the trend may have accelerated in 2024. The increase in AI models' time horizons seems to be primarily driven by greater reliability and ability to adapt to mistakes, combined with better logical reasoning and tool use capabilities. We discuss the limitations of our results -- including their degree of external validity -- and the implications of increased autonomy for dangerous capabilities. If these results generalize to real-world software tasks, extrapolation of this trend predicts that within 5 years, AI systems will be capable of automating many software tasks that currently take humans a month.
RE-Bench: Evaluating frontier AI R&D capabilities of language model agents against human experts
Nov 22, 2024Frontier AI safety policies highlight automation of AI research and development (R&D) by AI agents as an important capability to anticipate. However, there exist few evaluations for AI R&D capabilities, and none that are highly realistic and have a direct comparison to human performance. We introduce RE-Bench (Research Engineering Benchmark, v1), which consists of 7 challenging, open-ended ML research engineering environments and data from 71 8-hour attempts by 61 distinct human experts. We confirm that our experts make progress in the environments given 8 hours, with 82% of expert attempts achieving a non-zero score and 24% matching or exceeding our strong reference solutions. We compare humans to several public frontier models through best-of-k with varying time budgets and agent designs, and find that the best AI agents achieve a score 4x higher than human experts when both are given a total time budget of 2 hours per environment. However, humans currently display better returns to increasing time budgets, narrowly exceeding the top AI agent scores given an 8-hour budget, and achieving 2x the score of the top AI agent when both are given 32 total hours (across different attempts). Qualitatively, we find that modern AI agents possess significant expertise in many ML topics -- e.g. an agent wrote a faster custom Triton kernel than any of our human experts' -- and can generate and test solutions over ten times faster than humans, at much lower cost. We open-source the evaluation environments, human expert data, analysis code and agent trajectories to facilitate future research.
Learning Markov State Abstractions for Deep Reinforcement Learning
Jun 08, 2021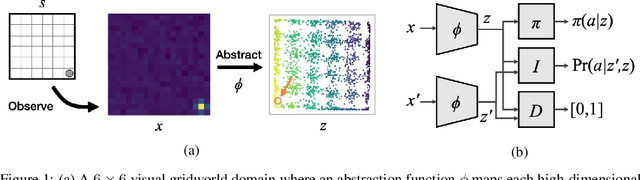
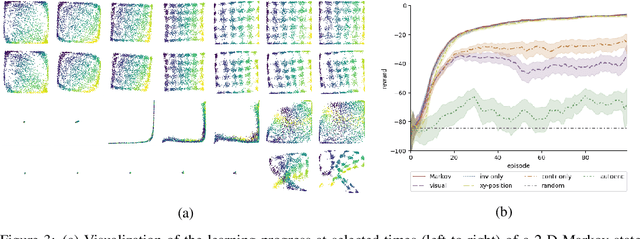
The fundamental assumption of reinforcement learning in Markov decision processes (MDPs) is that the relevant decision process is, in fact, Markov. However, when MDPs have rich observations, agents typically learn by way of an abstract state representation, and such representations are not guaranteed to preserve the Markov property. We introduce a novel set of conditions and prove that they are sufficient for learning a Markov abstract state representation. We then describe a practical training procedure that combines inverse model estimation and temporal contrastive learning to learn an abstraction that approximately satisfies these conditions. Our novel training objective is compatible with both online and offline training: it does not require a reward signal, but agents can capitalize on reward information when available. We empirically evaluate our approach on a visual gridworld domain and a set of continuous control benchmarks. Our approach learns representations that capture the underlying structure of the domain and lead to improved sample efficiency over state-of-the-art deep reinforcement learning with visual features -- often matching or exceeding the performance achieved with hand-designed compact state information.