 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSurgical Visual Understanding (SurgVU) Dataset
Jan 16, 2025



Owing to recent advances in machine learning and the ability to harvest large amounts of data during robotic-assisted surgeries, surgical data science is ripe for foundational work. We present a large dataset of surgical videos and their accompanying labels for this purpose. We describe how the data was collected and some of its unique attributes. Multiple example problems are outlined. Although the dataset was curated for a particular set of scientific challenges (in an accompanying paper), it is general enough to be used for a broad range machine learning questions. Our hope is that this dataset exposes the larger machine learning community to the challenging problems within surgical data science, and becomes a touchstone for future research. The videos are available at https://storage.googleapis.com/isi-surgvu/surgvu24_videos_only.zip, the labels at https://storage.googleapis.com/isi-surgvu/surgvu24_labels_updated_v2.zip, and a validation set for tool detection problem at https://storage.googleapis.com/isi-surgvu/cat1_test_set_public.zip.
Surgical tool classification and localization: results and methods from the MICCAI 2022 SurgToolLoc challenge
May 11, 2023



The ability to automatically detect and track surgical instruments in endoscopic videos can enable transformational interventions. Assessing surgical performance and efficiency, identifying skilled tool use and choreography, and planning operational and logistical aspects of OR resources are just a few of the applications that could benefit. Unfortunately, obtaining the annotations needed to train machine learning models to identify and localize surgical tools is a difficult task. Annotating bounding boxes frame-by-frame is tedious and time-consuming, yet large amounts of data with a wide variety of surgical tools and surgeries must be captured for robust training. Moreover, ongoing annotator training is needed to stay up to date with surgical instrument innovation. In robotic-assisted surgery, however, potentially informative data like timestamps of instrument installation and removal can be programmatically harvested. The ability to rely on tool installation data alone would significantly reduce the workload to train robust tool-tracking models. With this motivation in mind we invited the surgical data science community to participate in the challenge, SurgToolLoc 2022. The goal was to leverage tool presence data as weak labels for machine learning models trained to detect tools and localize them in video frames with bounding boxes. We present the results of this challenge along with many of the team's efforts. We conclude by discussing these results in the broader context of machine learning and surgical data science. The training data used for this challenge consisting of 24,695 video clips with tool presence labels is also being released publicly and can be accessed at https://console.cloud.google.com/storage/browser/isi-surgtoolloc-2022.
Why is the winner the best?
Mar 30, 2023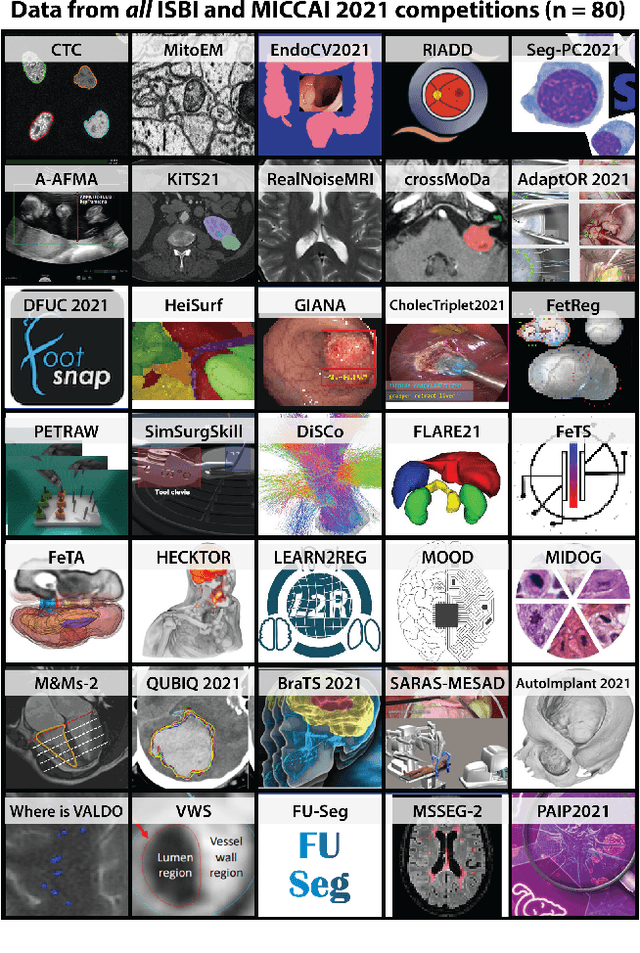
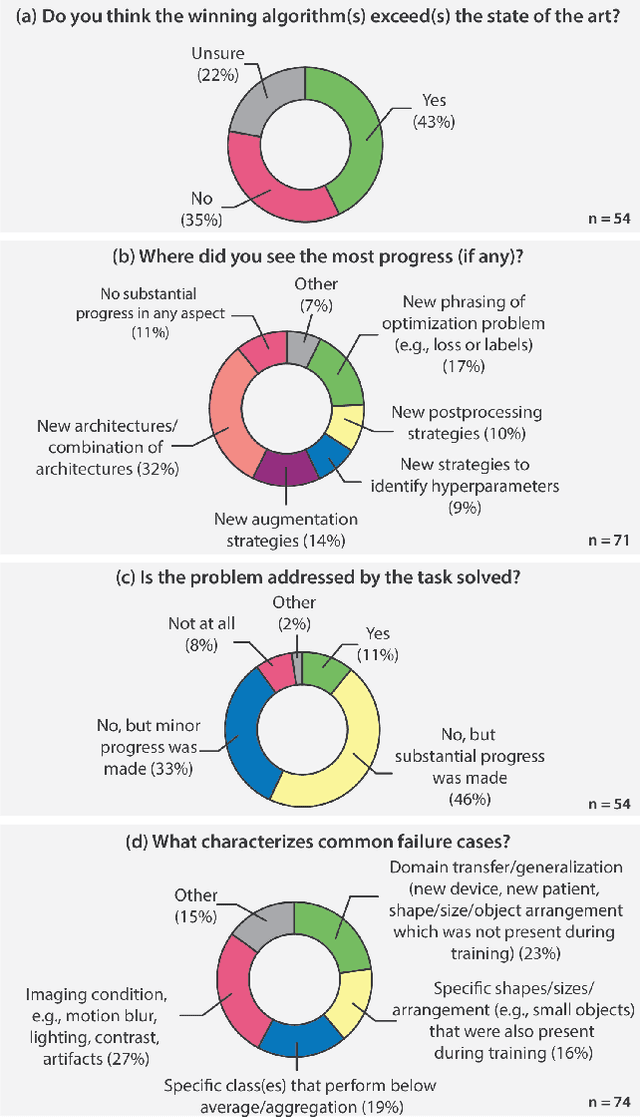
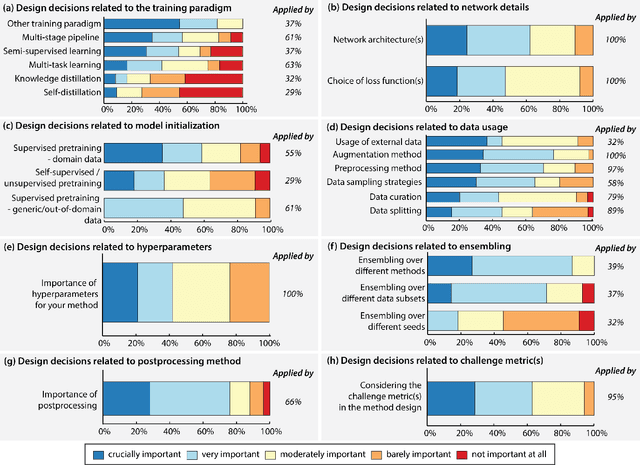
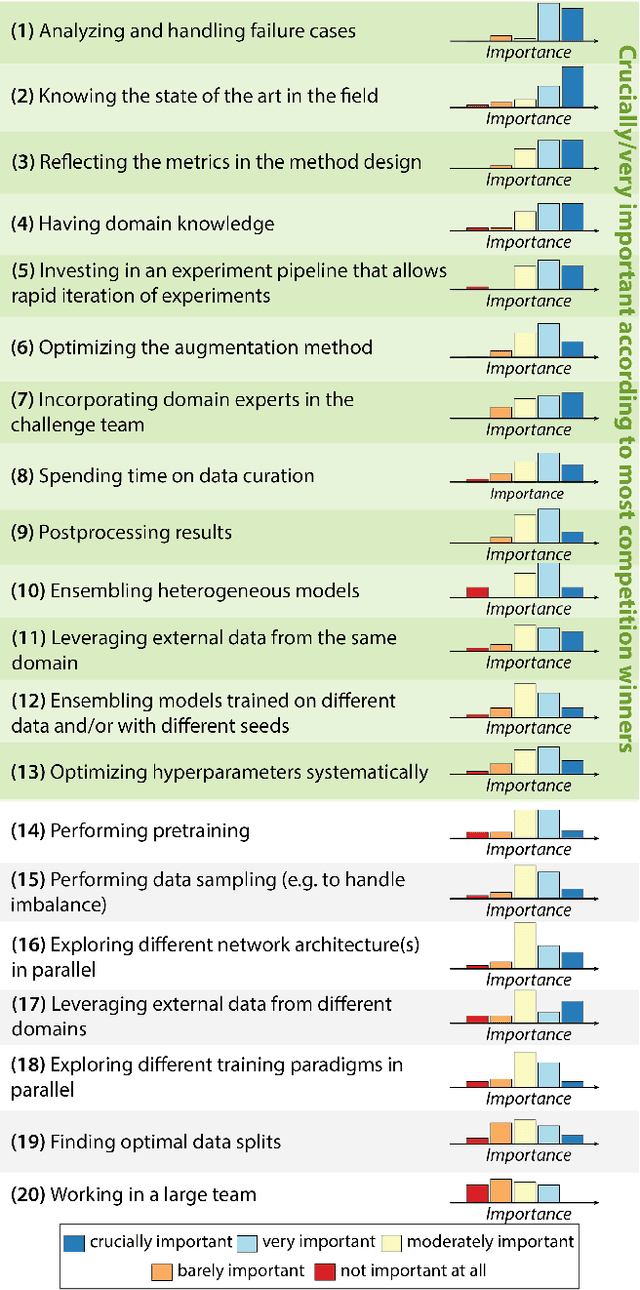
International benchmarking competitions have become fundamental for the comparative performance assessment of image analysis methods. However, little attention has been given to investigating what can be learnt from these competitions. Do they really generate scientific progress? What are common and successful participation strategies? What makes a solution superior to a competing method? To address this gap in the literature, we performed a multi-center study with all 80 competitions that were conducted in the scope of IEEE ISBI 2021 and MICCAI 2021. Statistical analyses performed based on comprehensive descriptions of the submitted algorithms linked to their rank as well as the underlying participation strategies revealed common characteristics of winning solutions. These typically include the use of multi-task learning (63%) and/or multi-stage pipelines (61%), and a focus on augmentation (100%), image preprocessing (97%), data curation (79%), and postprocessing (66%). The "typical" lead of a winning team is a computer scientist with a doctoral degree, five years of experience in biomedical image analysis, and four years of experience in deep learning. Two core general development strategies stood out for highly-ranked teams: the reflection of the metrics in the method design and the focus on analyzing and handling failure cases. According to the organizers, 43% of the winning algorithms exceeded the state of the art but only 11% completely solved the respective domain problem. The insights of our study could help researchers (1) improve algorithm development strategies when approaching new problems, and (2) focus on open research questions revealed by this work.
Biomedical image analysis competitions: The state of current participation practice
Dec 16, 2022The number of international benchmarking competitions is steadily increasing in various fields of machine learning (ML) research and practice. So far, however, little is known about the common practice as well as bottlenecks faced by the community in tackling the research questions posed. To shed light on the status quo of algorithm development in the specific field of biomedical imaging analysis, we designed an international survey that was issued to all participants of challenges conducted in conjunction with the IEEE ISBI 2021 and MICCAI 2021 conferences (80 competitions in total). The survey covered participants' expertise and working environments, their chosen strategies, as well as algorithm characteristics. A median of 72% challenge participants took part in the survey. According to our results, knowledge exchange was the primary incentive (70%) for participation, while the reception of prize money played only a minor role (16%). While a median of 80 working hours was spent on method development, a large portion of participants stated that they did not have enough time for method development (32%). 25% perceived the infrastructure to be a bottleneck. Overall, 94% of all solutions were deep learning-based. Of these, 84% were based on standard architectures. 43% of the respondents reported that the data samples (e.g., images) were too large to be processed at once. This was most commonly addressed by patch-based training (69%), downsampling (37%), and solving 3D analysis tasks as a series of 2D tasks. K-fold cross-validation on the training set was performed by only 37% of the participants and only 50% of the participants performed ensembling based on multiple identical models (61%) or heterogeneous models (39%). 48% of the respondents applied postprocessing steps.
Objective Surgical Skills Assessment and Tool Localization: Results from the MICCAI 2021 SimSurgSkill Challenge
Dec 08, 2022Timely and effective feedback within surgical training plays a critical role in developing the skills required to perform safe and efficient surgery. Feedback from expert surgeons, while especially valuable in this regard, is challenging to acquire due to their typically busy schedules, and may be subject to biases. Formal assessment procedures like OSATS and GEARS attempt to provide objective measures of skill, but remain time-consuming. With advances in machine learning there is an opportunity for fast and objective automated feedback on technical skills. The SimSurgSkill 2021 challenge (hosted as a sub-challenge of EndoVis at MICCAI 2021) aimed to promote and foster work in this endeavor. Using virtual reality (VR) surgical tasks, competitors were tasked with localizing instruments and predicting surgical skill. Here we summarize the winning approaches and how they performed. Using this publicly available dataset and results as a springboard, future work may enable more efficient training of surgeons with advances in surgical data science. The dataset can be accessed from https://console.cloud.google.com/storage/browser/isi-simsurgskill-2021.
Surgical Visual Domain Adaptation: Results from the MICCAI 2020 SurgVisDom Challenge
Feb 26, 2021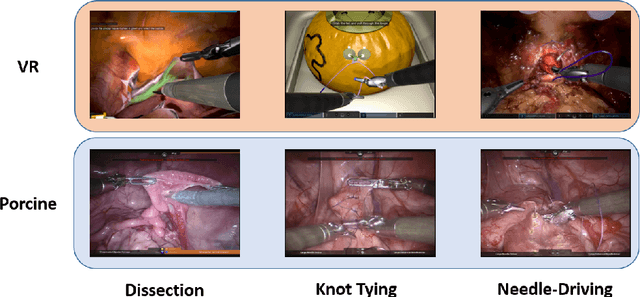
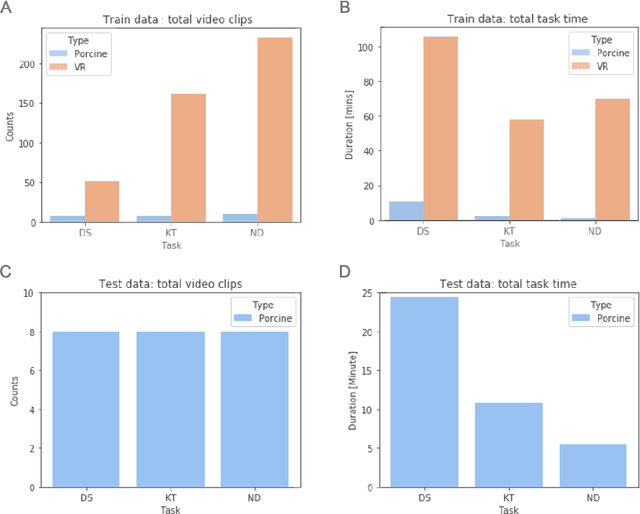
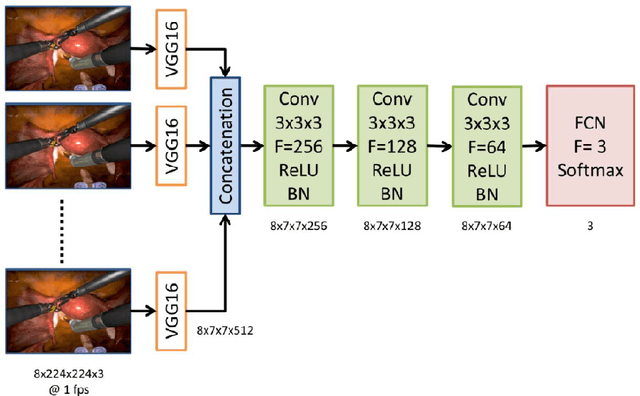
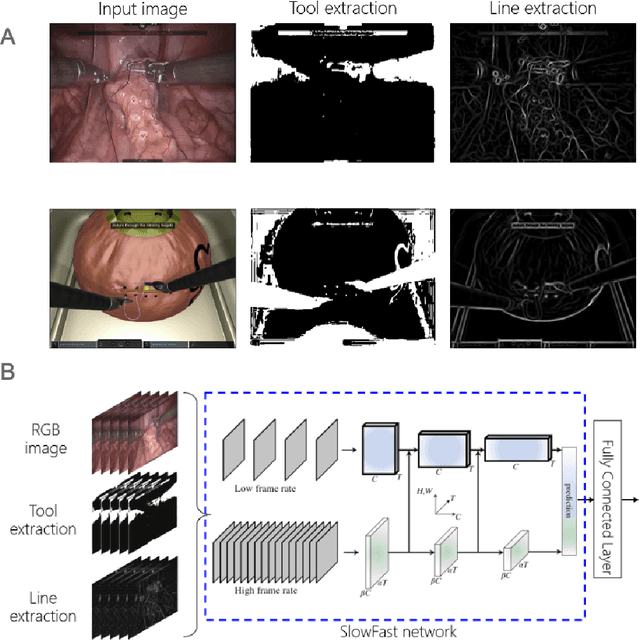
Surgical data science is revolutionizing minimally invasive surgery by enabling context-aware applications. However, many challenges exist around surgical data (and health data, more generally) needed to develop context-aware models. This work - presented as part of the Endoscopic Vision (EndoVis) challenge at the Medical Image Computing and Computer Assisted Intervention (MICCAI) 2020 conference - seeks to explore the potential for visual domain adaptation in surgery to overcome data privacy concerns. In particular, we propose to use video from virtual reality (VR) simulations of surgical exercises in robotic-assisted surgery to develop algorithms to recognize tasks in a clinical-like setting. We present the performance of the different approaches to solve visual domain adaptation developed by challenge participants. Our analysis shows that the presented models were unable to learn meaningful motion based features form VR data alone, but did significantly better when small amount of clinical-like data was also made available. Based on these results, we discuss promising methods and further work to address the problem of visual domain adaptation in surgical data science. We also release the challenge dataset publicly at https://www.synapse.org/surgvisdom2020.
Novel evaluation of surgical activity recognition models using task-based efficiency metrics
Jul 03, 2019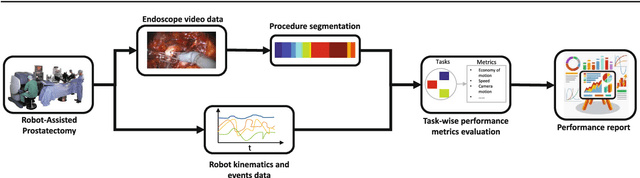

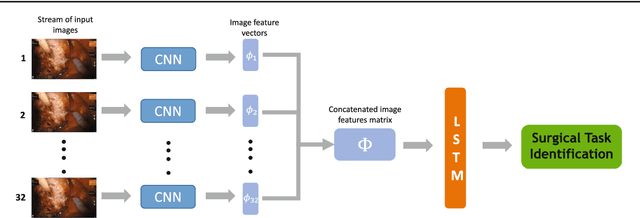
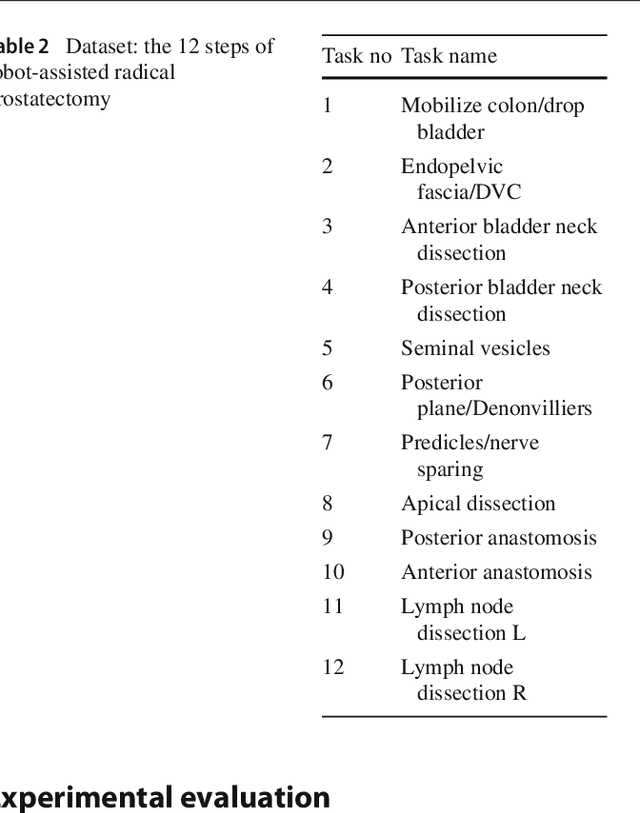
Purpose: Surgical task-based metrics (rather than entire procedure metrics) can be used to improve surgeon training and, ultimately, patient care through focused training interventions. Machine learning models to automatically recognize individual tasks or activities are needed to overcome the otherwise manual effort of video review. Traditionally, these models have been evaluated using frame-level accuracy. Here, we propose evaluating surgical activity recognition models by their effect on task-based efficiency metrics. In this way, we can determine when models have achieved adequate performance for providing surgeon feedback via metrics from individual tasks. Methods: We propose a new CNN-LSTM model, RP-Net-V2, to recognize the 12 steps of robotic-assisted radical prostatectomies (RARP). We evaluated our model both in terms of conventional methods (e.g. Jaccard Index, task boundary accuracy) as well as novel ways, such as the accuracy of efficiency metrics computed from instrument movements and system events. Results: Our proposed model achieves a Jaccard Index of 0.85 thereby outperforming previous models on robotic-assisted radical prostatectomies. Additionally, we show that metrics computed from tasks automatically identified using RP-Net-V2 correlate well with metrics from tasks labeled by clinical experts. Conclusions: We demonstrate that metrics-based evaluation of surgical activity recognition models is a viable approach to determine when models can be used to quantify surgical efficiencies. We believe this approach and our results illustrate the potential for fully automated, post-operative efficiency reports.
Surgical Activity Recognition in Robot-Assisted Radical Prostatectomy using Deep Learning
Jun 01, 2018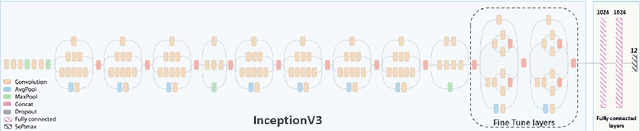
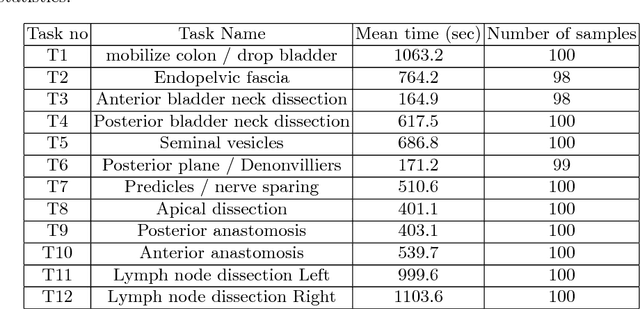

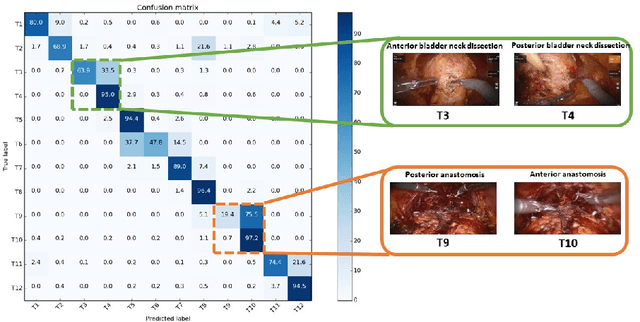
Adverse surgical outcomes are costly to patients and hospitals. Approaches to benchmark surgical care are often limited to gross measures across the entire procedure despite the performance of particular tasks being largely responsible for undesirable outcomes. In order to produce metrics from tasks as opposed to the whole procedure, methods to recognize automatically individual surgical tasks are needed. In this paper, we propose several approaches to recognize surgical activities in robot-assisted minimally invasive surgery using deep learning. We collected a clinical dataset of 100 robot-assisted radical prostatectomies (RARP) with 12 tasks each and propose `RP-Net', a modified version of InceptionV3 model, for image based surgical activity recognition. We achieve an average precision of 80.9% and average recall of 76.7% across all tasks using RP-Net which out-performs all other RNN and CNN based models explored in this paper. Our results suggest that automatic surgical activity recognition during RARP is feasible and can be the foundation for advanced analytics.
Automated Surgical Skill Assessment in RMIS Training
Dec 22, 2017

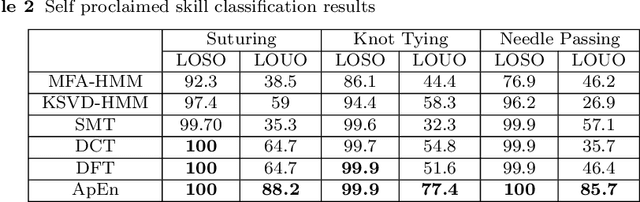
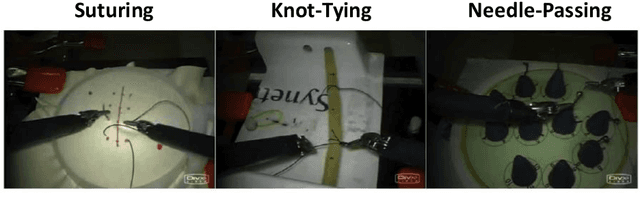
Purpose: Manual feedback in basic RMIS training can consume a significant amount of time from expert surgeons' schedule and is prone to subjectivity. While VR-based training tasks can generate automated score reports, there is no mechanism of generating automated feedback for surgeons performing basic surgical tasks in RMIS training. In this paper, we explore the usage of different holistic features for automated skill assessment using only robot kinematic data and propose a weighted feature fusion technique for improving score prediction performance. Methods: We perform our experiments on the publicly available JIGSAWS dataset and evaluate four different types of holistic features from robot kinematic data - Sequential Motion Texture (SMT), Discrete Fourier Transform (DFT), Discrete Cosine Transform (DCT) and Approximate Entropy (ApEn). The features are then used for skill classification and exact skill score prediction. Along with using these features individually, we also evaluate the performance using our proposed weighted combination technique. Results: Our results demonstrate that these holistic features outperform all previous HMM based state-of-the-art methods for skill classification on the JIGSAWS dataset. Also, our proposed feature fusion strategy significantly improves performance for skill score predictions achieving up to 0.61 average spearman correlation coefficient. Conclusions: Holistic features capturing global information from robot kinematic data can successfully be used for evaluating surgeon skill in basic surgical tasks on the da Vinci robot. Using the framework presented can potentially allow for real time score feedback in RMIS training.
Video and Accelerometer-Based Motion Analysis for Automated Surgical Skills Assessment
Feb 24, 2017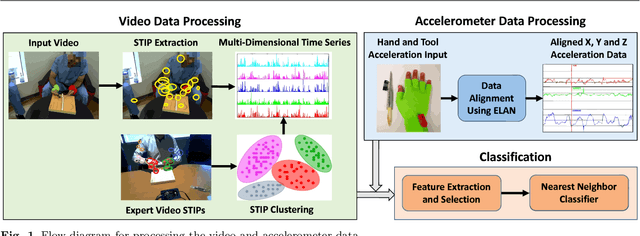
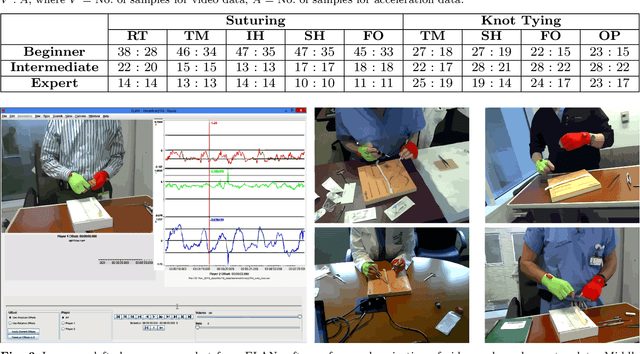

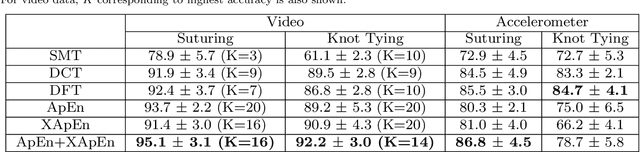
Purpose: Basic surgical skills of suturing and knot tying are an essential part of medical training. Having an automated system for surgical skills assessment could help save experts time and improve training efficiency. There have been some recent attempts at automated surgical skills assessment using either video analysis or acceleration data. In this paper, we present a novel approach for automated assessment of OSATS based surgical skills and provide an analysis of different features on multi-modal data (video and accelerometer data). Methods: We conduct the largest study, to the best of our knowledge, for basic surgical skills assessment on a dataset that contained video and accelerometer data for suturing and knot-tying tasks. We introduce "entropy based" features - Approximate Entropy (ApEn) and Cross-Approximate Entropy (XApEn), which quantify the amount of predictability and regularity of fluctuations in time-series data. The proposed features are compared to existing methods of Sequential Motion Texture (SMT), Discrete Cosine Transform (DCT) and Discrete Fourier Transform (DFT), for surgical skills assessment. Results: We report average performance of different features across all applicable OSATS criteria for suturing and knot tying tasks. Our analysis shows that the proposed entropy based features out-perform previous state-of-the-art methods using video data. For accelerometer data, our method performs better for suturing only. We also show that fusion of video and acceleration features can improve overall performance with the proposed entropy features achieving highest accuracy. Conclusions: Automated surgical skills assessment can be achieved with high accuracy using the proposed entropy features. Such a system can significantly improve the efficiency of surgical training in medical schools and teaching hospitals.