 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSurgical Activity Recognition in Robot-Assisted Radical Prostatectomy using Deep Learning
Paper and Code
Jun 01, 2018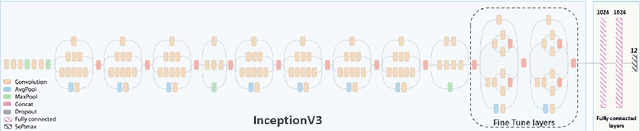
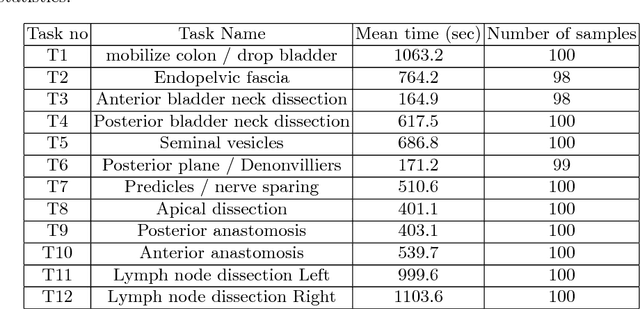

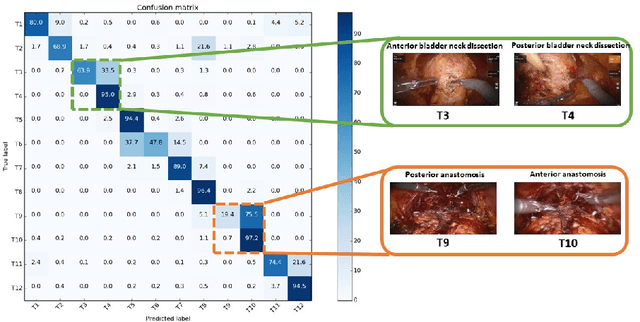
Adverse surgical outcomes are costly to patients and hospitals. Approaches to benchmark surgical care are often limited to gross measures across the entire procedure despite the performance of particular tasks being largely responsible for undesirable outcomes. In order to produce metrics from tasks as opposed to the whole procedure, methods to recognize automatically individual surgical tasks are needed. In this paper, we propose several approaches to recognize surgical activities in robot-assisted minimally invasive surgery using deep learning. We collected a clinical dataset of 100 robot-assisted radical prostatectomies (RARP) with 12 tasks each and propose `RP-Net', a modified version of InceptionV3 model, for image based surgical activity recognition. We achieve an average precision of 80.9% and average recall of 76.7% across all tasks using RP-Net which out-performs all other RNN and CNN based models explored in this paper. Our results suggest that automatic surgical activity recognition during RARP is feasible and can be the foundation for advanced analytics.