 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSurgical Visual Understanding (SurgVU) Dataset
Jan 16, 2025



Owing to recent advances in machine learning and the ability to harvest large amounts of data during robotic-assisted surgeries, surgical data science is ripe for foundational work. We present a large dataset of surgical videos and their accompanying labels for this purpose. We describe how the data was collected and some of its unique attributes. Multiple example problems are outlined. Although the dataset was curated for a particular set of scientific challenges (in an accompanying paper), it is general enough to be used for a broad range machine learning questions. Our hope is that this dataset exposes the larger machine learning community to the challenging problems within surgical data science, and becomes a touchstone for future research. The videos are available at https://storage.googleapis.com/isi-surgvu/surgvu24_videos_only.zip, the labels at https://storage.googleapis.com/isi-surgvu/surgvu24_labels_updated_v2.zip, and a validation set for tool detection problem at https://storage.googleapis.com/isi-surgvu/cat1_test_set_public.zip.
Surgical tool classification and localization: results and methods from the MICCAI 2022 SurgToolLoc challenge
May 11, 2023



The ability to automatically detect and track surgical instruments in endoscopic videos can enable transformational interventions. Assessing surgical performance and efficiency, identifying skilled tool use and choreography, and planning operational and logistical aspects of OR resources are just a few of the applications that could benefit. Unfortunately, obtaining the annotations needed to train machine learning models to identify and localize surgical tools is a difficult task. Annotating bounding boxes frame-by-frame is tedious and time-consuming, yet large amounts of data with a wide variety of surgical tools and surgeries must be captured for robust training. Moreover, ongoing annotator training is needed to stay up to date with surgical instrument innovation. In robotic-assisted surgery, however, potentially informative data like timestamps of instrument installation and removal can be programmatically harvested. The ability to rely on tool installation data alone would significantly reduce the workload to train robust tool-tracking models. With this motivation in mind we invited the surgical data science community to participate in the challenge, SurgToolLoc 2022. The goal was to leverage tool presence data as weak labels for machine learning models trained to detect tools and localize them in video frames with bounding boxes. We present the results of this challenge along with many of the team's efforts. We conclude by discussing these results in the broader context of machine learning and surgical data science. The training data used for this challenge consisting of 24,695 video clips with tool presence labels is also being released publicly and can be accessed at https://console.cloud.google.com/storage/browser/isi-surgtoolloc-2022.
CholecTriplet2022: Show me a tool and tell me the triplet -- an endoscopic vision challenge for surgical action triplet detection
Feb 13, 2023
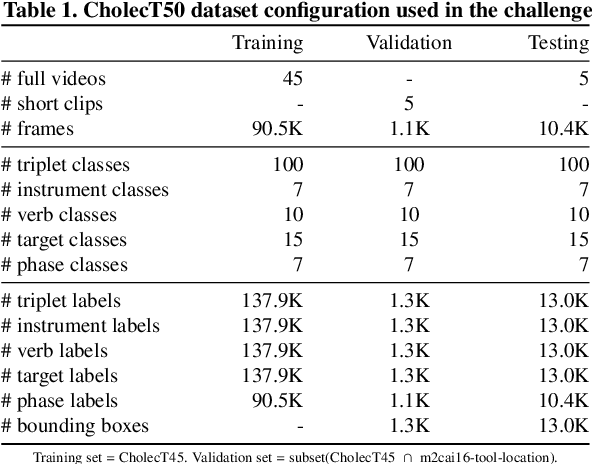
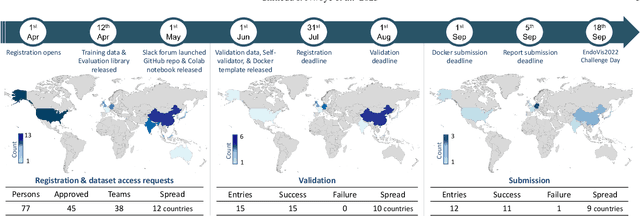
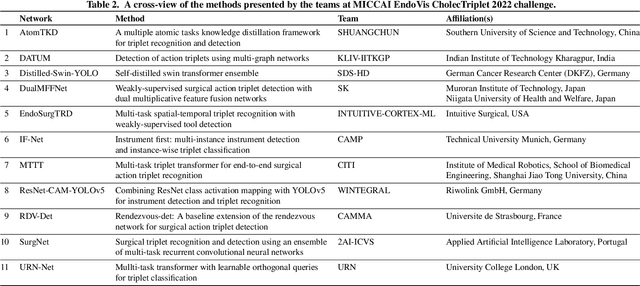
Formalizing surgical activities as triplets of the used instruments, actions performed, and target anatomies is becoming a gold standard approach for surgical activity modeling. The benefit is that this formalization helps to obtain a more detailed understanding of tool-tissue interaction which can be used to develop better Artificial Intelligence assistance for image-guided surgery. Earlier efforts and the CholecTriplet challenge introduced in 2021 have put together techniques aimed at recognizing these triplets from surgical footage. Estimating also the spatial locations of the triplets would offer a more precise intraoperative context-aware decision support for computer-assisted intervention. This paper presents the CholecTriplet2022 challenge, which extends surgical action triplet modeling from recognition to detection. It includes weakly-supervised bounding box localization of every visible surgical instrument (or tool), as the key actors, and the modeling of each tool-activity in the form of <instrument, verb, target> triplet. The paper describes a baseline method and 10 new deep learning algorithms presented at the challenge to solve the task. It also provides thorough methodological comparisons of the methods, an in-depth analysis of the obtained results, their significance, and useful insights for future research directions and applications in surgery.
Objective Surgical Skills Assessment and Tool Localization: Results from the MICCAI 2021 SimSurgSkill Challenge
Dec 08, 2022Timely and effective feedback within surgical training plays a critical role in developing the skills required to perform safe and efficient surgery. Feedback from expert surgeons, while especially valuable in this regard, is challenging to acquire due to their typically busy schedules, and may be subject to biases. Formal assessment procedures like OSATS and GEARS attempt to provide objective measures of skill, but remain time-consuming. With advances in machine learning there is an opportunity for fast and objective automated feedback on technical skills. The SimSurgSkill 2021 challenge (hosted as a sub-challenge of EndoVis at MICCAI 2021) aimed to promote and foster work in this endeavor. Using virtual reality (VR) surgical tasks, competitors were tasked with localizing instruments and predicting surgical skill. Here we summarize the winning approaches and how they performed. Using this publicly available dataset and results as a springboard, future work may enable more efficient training of surgeons with advances in surgical data science. The dataset can be accessed from https://console.cloud.google.com/storage/browser/isi-simsurgskill-2021.
Force Field Generalization and the Internal Representation of Motor Learning
Oct 07, 2019
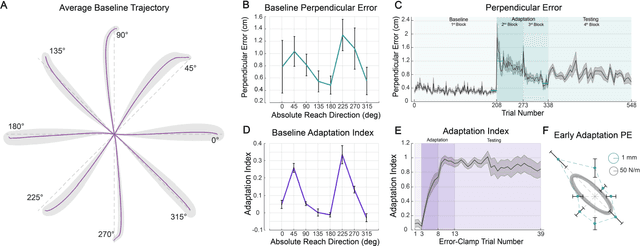

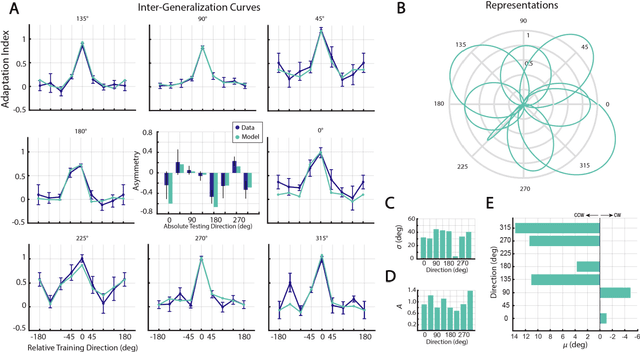
When learning a new motor behavior, e.g. reaching in a force field, the nervous system builds an internal representation. Examining how subsequent reaches in unpracticed directions generalize reveals this representation. Though it is the subject of frequent studies, it is not known how this representation changes across training directions, or how changes in reach direction and the corresponding changes in limb impedance, influence measurements of it. We ran a force field adaptation experiment using eight groups of subjects each trained on one of eight standard directions and then tested for generalization in the remaining seven directions. Generalization in all directions was local and asymmetric, providing limited and unequal transfer to the left and right side of the trained target. These asymmetries were not consistent in either magnitude or direction even after correcting for changes in limb impedance, at odds with previous explanations. Relying on a standard model for generalization the inferred representations inconsistently shifted to one side or the other of their respective training direction. A second model that accounted for limb impedance and variations in baseline trajectories explained more data and the inferred representations were centered on their respective training directions. Our results highlight the influence of limb mechanics and impedance on psychophysical measurements and their interpretations for motor learning.