 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSurgical Visual Domain Adaptation: Results from the MICCAI 2020 SurgVisDom Challenge
Feb 26, 2021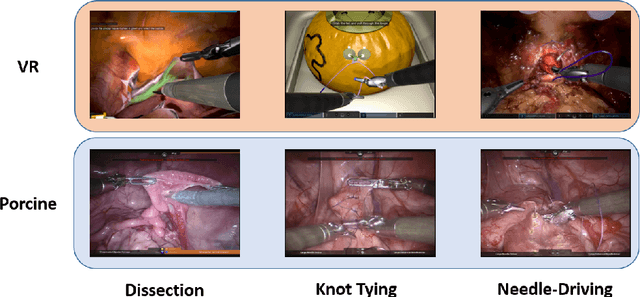
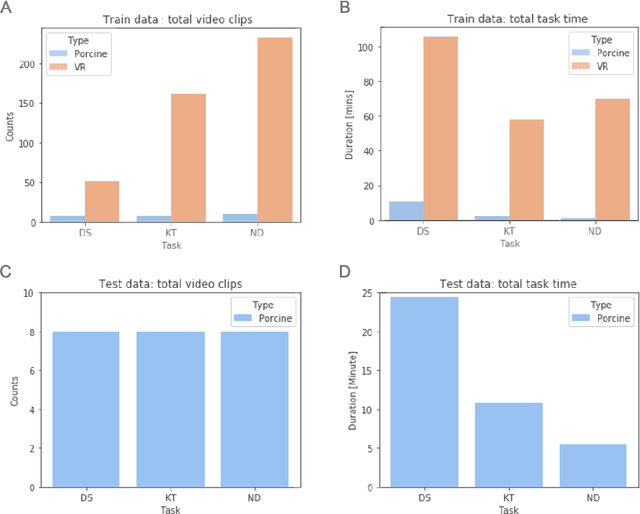
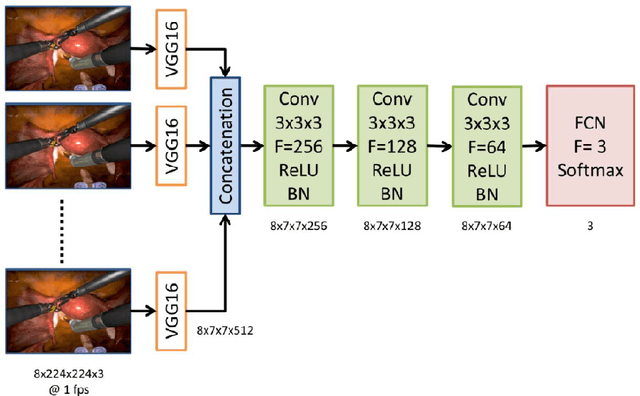
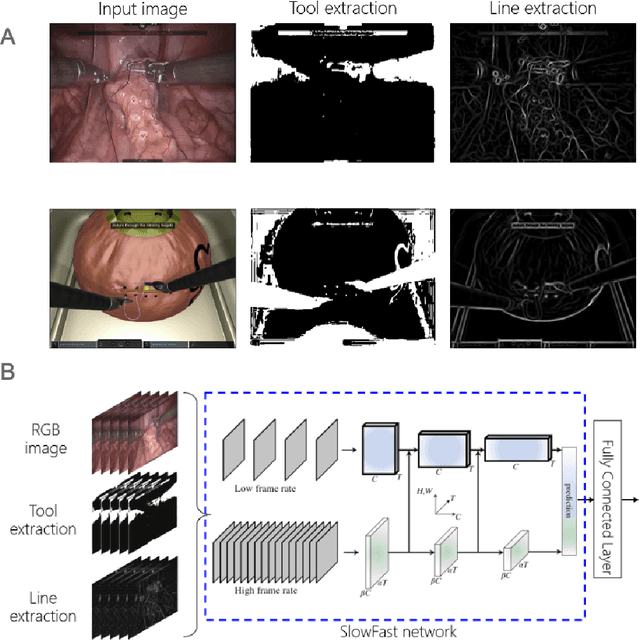
Surgical data science is revolutionizing minimally invasive surgery by enabling context-aware applications. However, many challenges exist around surgical data (and health data, more generally) needed to develop context-aware models. This work - presented as part of the Endoscopic Vision (EndoVis) challenge at the Medical Image Computing and Computer Assisted Intervention (MICCAI) 2020 conference - seeks to explore the potential for visual domain adaptation in surgery to overcome data privacy concerns. In particular, we propose to use video from virtual reality (VR) simulations of surgical exercises in robotic-assisted surgery to develop algorithms to recognize tasks in a clinical-like setting. We present the performance of the different approaches to solve visual domain adaptation developed by challenge participants. Our analysis shows that the presented models were unable to learn meaningful motion based features form VR data alone, but did significantly better when small amount of clinical-like data was also made available. Based on these results, we discuss promising methods and further work to address the problem of visual domain adaptation in surgical data science. We also release the challenge dataset publicly at https://www.synapse.org/surgvisdom2020.
Gesture Recognition in Robotic Surgery: a Review
Jan 29, 2021



Objective: Surgical activity recognition is a fundamental step in computer-assisted interventions. This paper reviews the state-of-the-art in methods for automatic recognition of fine-grained gestures in robotic surgery focusing on recent data-driven approaches and outlines the open questions and future research directions. Methods: An article search was performed on 5 bibliographic databases with the following search terms: robotic, robot-assisted, JIGSAWS, surgery, surgical, gesture, fine-grained, surgeme, action, trajectory, segmentation, recognition, parsing. Selected articles were classified based on the level of supervision required for training and divided into different groups representing major frameworks for time series analysis and data modelling. Results: A total of 52 articles were reviewed. The research field is showing rapid expansion, with the majority of articles published in the last 4 years. Deep-learning-based temporal models with discriminative feature extraction and multi-modal data integration have demonstrated promising results on small surgical datasets. Currently, unsupervised methods perform significantly less well than the supervised approaches. Conclusion: The development of large and diverse open-source datasets of annotated demonstrations is essential for development and validation of robust solutions for surgical gesture recognition. While new strategies for discriminative feature extraction and knowledge transfer, or unsupervised and semi-supervised approaches, can mitigate the need for data and labels, they have not yet been demonstrated to achieve comparable performance. Important future research directions include detection and forecast of gesture-specific errors and anomalies. Significance: This paper is a comprehensive and structured analysis of surgical gesture recognition methods aiming to summarize the status of this rapidly evolving field.
Multi-Task Recurrent Neural Network for Surgical Gesture Recognition and Progress Prediction
Mar 10, 2020



Surgical gesture recognition is important for surgical data science and computer-aided intervention. Even with robotic kinematic information, automatically segmenting surgical steps presents numerous challenges because surgical demonstrations are characterized by high variability in style, duration and order of actions. In order to extract discriminative features from the kinematic signals and boost recognition accuracy, we propose a multi-task recurrent neural network for simultaneous recognition of surgical gestures and estimation of a novel formulation of surgical task progress. To show the effectiveness of the presented approach, we evaluate its application on the JIGSAWS dataset, that is currently the only publicly available dataset for surgical gesture recognition featuring robot kinematic data. We demonstrate that recognition performance improves in multi-task frameworks with progress estimation without any additional manual labelling and training.
Weakly Supervised Recognition of Surgical Gestures
Jul 25, 2019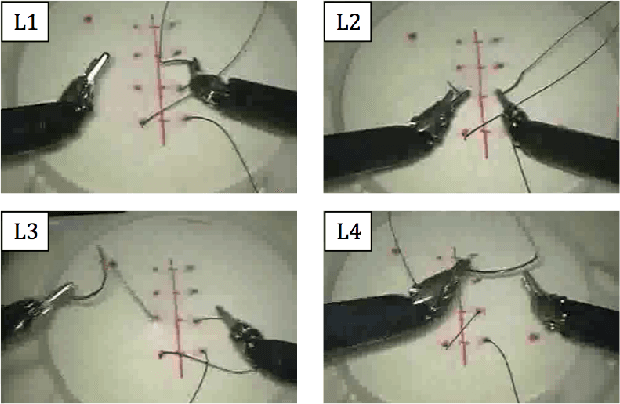
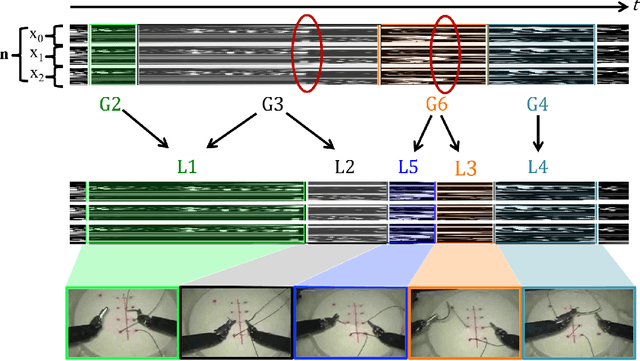
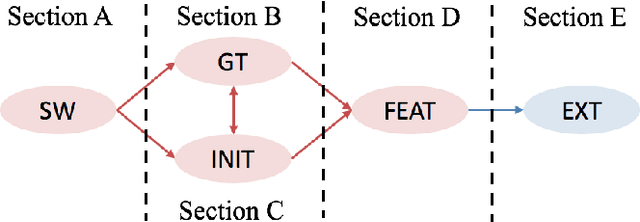
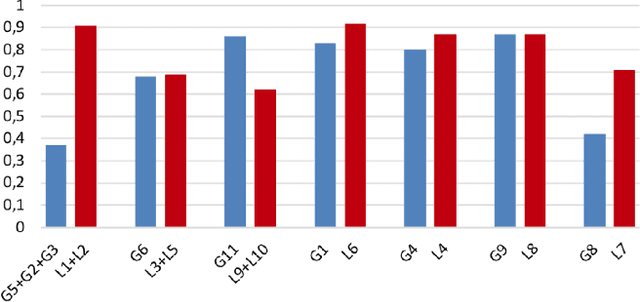
Kinematic trajectories recorded from surgical robots contain information about surgical gestures and potentially encode cues about surgeon's skill levels. Automatic segmentation of these trajectories into meaningful action units could help to develop new metrics for surgical skill assessment as well as to simplify surgical automation. State-of-the-art methods for action recognition relied on manual labelling of large datasets, which is time consuming and error prone. Unsupervised methods have been developed to overcome these limitations. However, they often rely on tedious parameter tuning and perform less well than supervised approaches, especially on data with high variability such as surgical trajectories. Hence, the potential of weak supervision could be to improve unsupervised learning while avoiding manual annotation of large datasets. In this paper, we used at a minimum one expert demonstration and its ground truth annotations to generate an appropriate initialization for a GMM-based algorithm for gesture recognition. We showed on real surgical demonstrations that the latter significantly outperforms standard task-agnostic initialization methods. We also demonstrated how to improve the recognition accuracy further by redefining the actions and optimising the inputs.