 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLogic programming for deliberative robotic task planning
Jan 18, 2023Over the last decade, the use of robots in production and daily life has increased. With increasingly complex tasks and interaction in different environments including humans, robots are required a higher level of autonomy for efficient deliberation. Task planning is a key element of deliberation. It combines elementary operations into a structured plan to satisfy a prescribed goal, given specifications on the robot and the environment. In this manuscript, we present a survey on recent advances in the application of logic programming to the problem of task planning. Logic programming offers several advantages compared to other approaches, including greater expressivity and interpretability which may aid in the development of safe and reliable robots. We analyze different planners and their suitability for specific robotic applications, based on expressivity in domain representation, computational efficiency and software implementation. In this way, we support the robotic designer in choosing the best tool for his application.
Surgical Data Science -- from Concepts to Clinical Translation
Oct 30, 2020
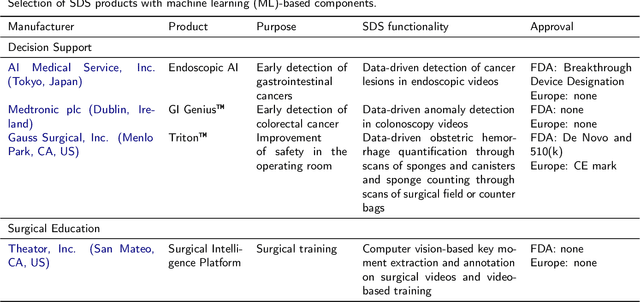
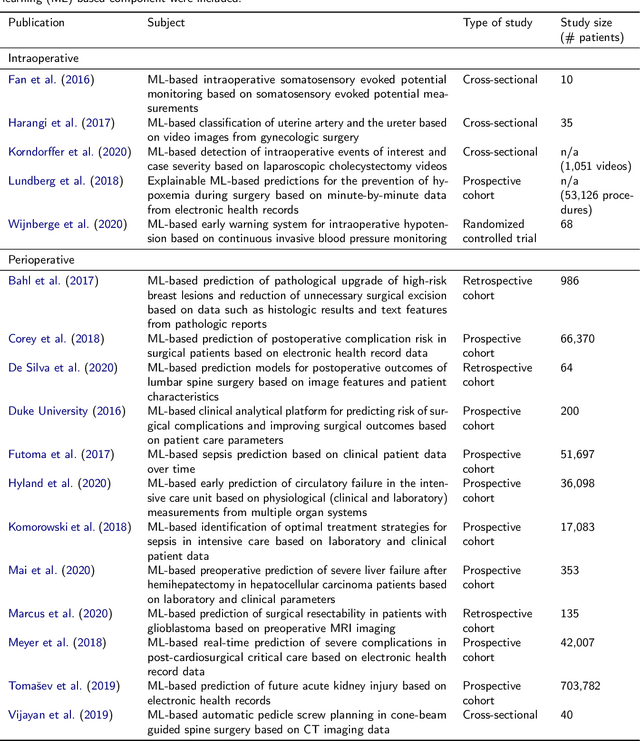
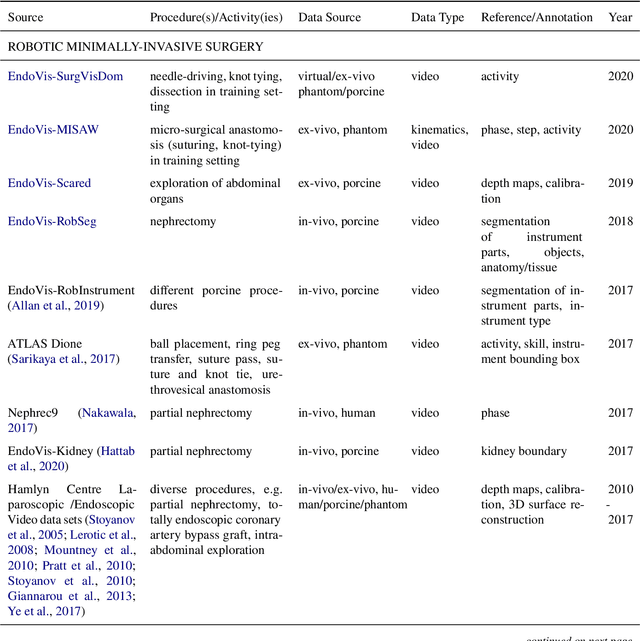
Recent developments in data science in general and machine learning in particular have transformed the way experts envision the future of surgery. Surgical data science is a new research field that aims to improve the quality of interventional healthcare through the capture, organization, analysis and modeling of data. While an increasing number of data-driven approaches and clinical applications have been studied in the fields of radiological and clinical data science, translational success stories are still lacking in surgery. In this publication, we shed light on the underlying reasons and provide a roadmap for future advances in the field. Based on an international workshop involving leading researchers in the field of surgical data science, we review current practice, key achievements and initiatives as well as available standards and tools for a number of topics relevant to the field, namely (1) technical infrastructure for data acquisition, storage and access in the presence of regulatory constraints, (2) data annotation and sharing and (3) data analytics. Drawing from this extensive review, we present current challenges for technology development and (4) describe a roadmap for faster clinical translation and exploitation of the full potential of surgical data science.
Weakly Supervised Recognition of Surgical Gestures
Jul 25, 2019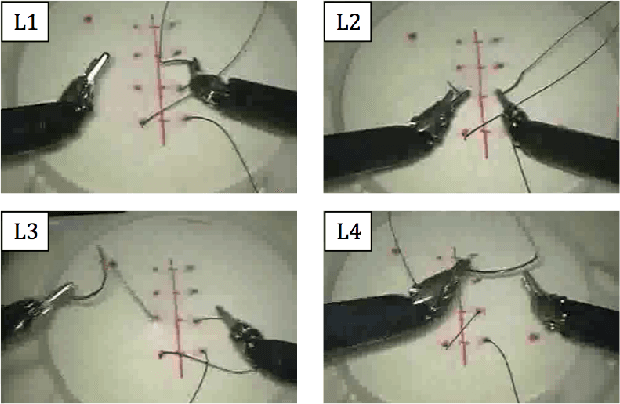
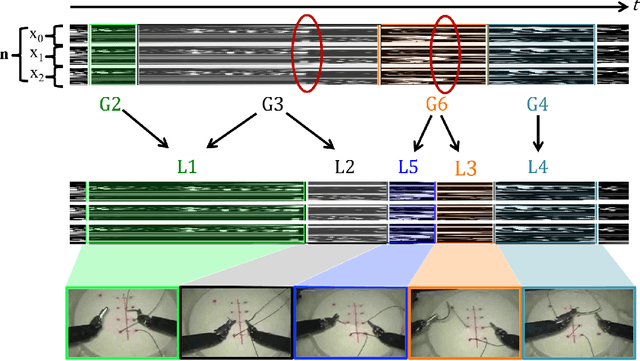
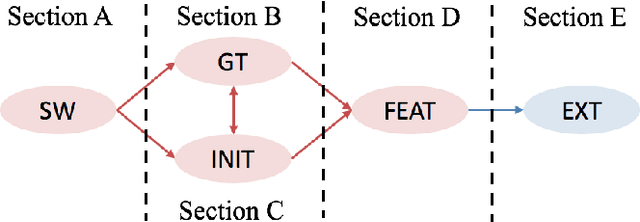
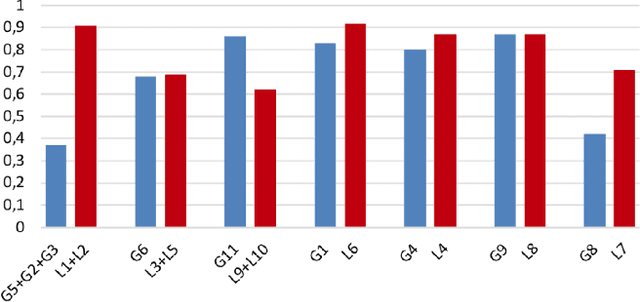
Kinematic trajectories recorded from surgical robots contain information about surgical gestures and potentially encode cues about surgeon's skill levels. Automatic segmentation of these trajectories into meaningful action units could help to develop new metrics for surgical skill assessment as well as to simplify surgical automation. State-of-the-art methods for action recognition relied on manual labelling of large datasets, which is time consuming and error prone. Unsupervised methods have been developed to overcome these limitations. However, they often rely on tedious parameter tuning and perform less well than supervised approaches, especially on data with high variability such as surgical trajectories. Hence, the potential of weak supervision could be to improve unsupervised learning while avoiding manual annotation of large datasets. In this paper, we used at a minimum one expert demonstration and its ground truth annotations to generate an appropriate initialization for a GMM-based algorithm for gesture recognition. We showed on real surgical demonstrations that the latter significantly outperforms standard task-agnostic initialization methods. We also demonstrated how to improve the recognition accuracy further by redefining the actions and optimising the inputs.