 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNovel evaluation of surgical activity recognition models using task-based efficiency metrics
Jul 03, 2019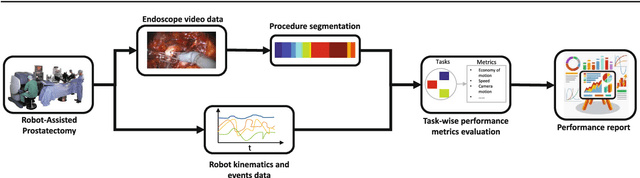

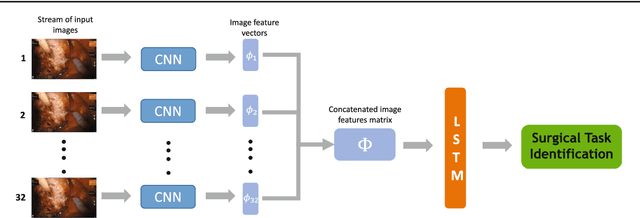
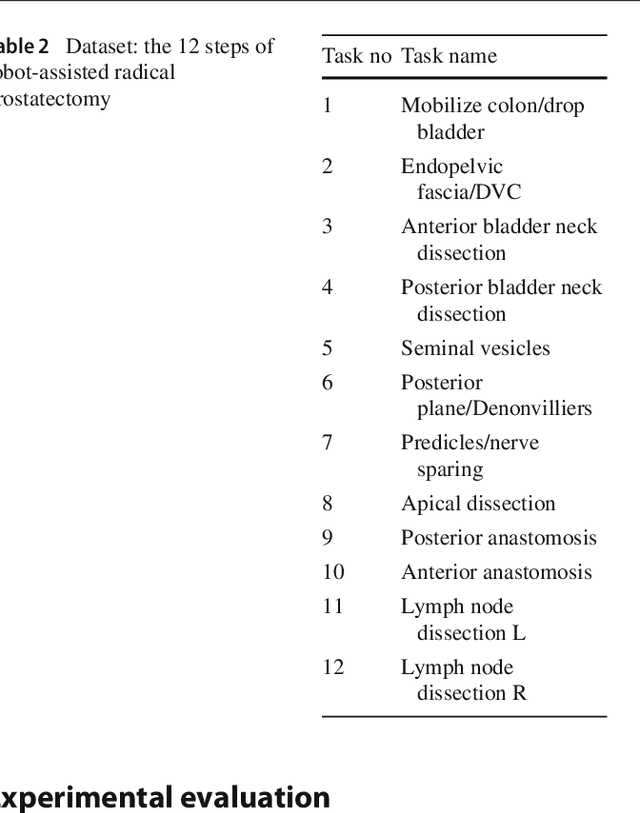
Purpose: Surgical task-based metrics (rather than entire procedure metrics) can be used to improve surgeon training and, ultimately, patient care through focused training interventions. Machine learning models to automatically recognize individual tasks or activities are needed to overcome the otherwise manual effort of video review. Traditionally, these models have been evaluated using frame-level accuracy. Here, we propose evaluating surgical activity recognition models by their effect on task-based efficiency metrics. In this way, we can determine when models have achieved adequate performance for providing surgeon feedback via metrics from individual tasks. Methods: We propose a new CNN-LSTM model, RP-Net-V2, to recognize the 12 steps of robotic-assisted radical prostatectomies (RARP). We evaluated our model both in terms of conventional methods (e.g. Jaccard Index, task boundary accuracy) as well as novel ways, such as the accuracy of efficiency metrics computed from instrument movements and system events. Results: Our proposed model achieves a Jaccard Index of 0.85 thereby outperforming previous models on robotic-assisted radical prostatectomies. Additionally, we show that metrics computed from tasks automatically identified using RP-Net-V2 correlate well with metrics from tasks labeled by clinical experts. Conclusions: We demonstrate that metrics-based evaluation of surgical activity recognition models is a viable approach to determine when models can be used to quantify surgical efficiencies. We believe this approach and our results illustrate the potential for fully automated, post-operative efficiency reports.