 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeClosed Form Relations and Higher-Order Approximations of First and Second Derivatives of the Tangent Operator on SE(3)
Apr 24, 2026The Lie group SE(3) of isometric orientation preserving transformation is used for modeling multibody systems, robots, and Cosserat continua. The use of these models in numerical simulation and optimization schemes necessitates the exponential map, its right-trivialized differential (often referred to as tangent operator), as well as higher derivatives in closed form. The $6\times 6$ matrix representation of the differential, $\mathbf{dexp}_{\mathbf{X}}:se\left( 3\right) \rightarrow se\left( 3\right) $ , and its first derivative were reported using a $3\times 3$ block partitioning. In this paper, the differential, its first and second derivative, as well as the Jacobian and Hessian of the evaluation maps, $\mathbf{dexp}_{\mathbf{X}}\mathbf{Z}$ and $\mathbf{dexp}_{\mathbf{X}}^{T}% \mathbf{Z}$, are reported avoiding the block partitioning. For all of them, higher-order approximations are derived. Besides the compactness, the advantage of the presented closed form relations is their numerical robustness when combined with the local approximation. The formulations are demonstrated for computation of the deformation field and the strain rates of an elastic Cosserat-Simo-Reissner rod.
Forward Dynamics of Variable Topology Mechanisms - The Case of Constraint Activation
Apr 21, 2026Many mechanical systems exhibit changes in their kinematic topology altering the mobility. Ideal contact is the best known cause, but also stiction and controlled locking of parts of a mechanism lead to topology changes. The latter is becoming an important issue in human-machine interaction. Anticipating the dynamic behavior of variable topology mechanisms requires solving a non-smooth dynamic problem. The core challenge is a physically meaningful transition condition at the topology switching events. Such a condition is presented in this paper. Two versions are reported, one using projected motion equations in terms of redundant coordinates, and another one using the Voronets equations in terms of minimal coordinates. Their computational properties are discussed. Results are shown for joint locking of a planar 3R mechanisms and a 6DOF industrial manipulator.
On the Terminology and Geometric Aspects of Redundant Parallel Manipulators
Apr 10, 2026Parallel kinematics machines (PKM) can exhibit kinematic as well as actuation redundancy. While the meaning of kinematic redundancy has been clarified already for serial manipulators, actuation redundancy, that is only possible in PKM, is differently classified in the literature. In this paper a consistent terminology for general redundant PKM is proposed. A kinematic model is introduced with the configuration space (c-space) as central part. The notion of kinematic redundancy is recalled for PKM. C-space, output, and input singularities are distinguished. The significance of the c-space geometry is emphasized, and it is pointed out geometrically that input singularities can be avoided by redundant actuation schemes. In order to distinguish different actuation schemes of PKM a non-linear control system is introduced whose dynamics evolves on the c-space. The degree of actuation (DOA) is introduced as the number of independent control vector fields, and PKM are classified as full-actuated and underactuated. Relating this DOA to the degree of freedom (DOF) allows to classify the actuation redundancy.
Nexus: Inferring Join Graphs from Metadata Alone via Iterative Low-Rank Matrix Completion
Feb 09, 2026Automatically inferring join relationships is a critical task for effective data discovery, integration, querying and reuse. However, accurately and efficiently identifying these relationships in large and complex schemas can be challenging, especially in enterprise settings where access to data values is constrained. In this paper, we introduce the problem of join graph inference when only metadata is available. We conduct an empirical study on a large number of real-world schemas and observe that join graphs when represented as adjacency matrices exhibit two key properties: high sparsity and low-rank structure. Based on these novel observations, we formulate join graph inference as a low-rank matrix completion problem and propose Nexus, an end-to-end solution using only metadata. To further enhance accuracy, we propose a novel Expectation-Maximization algorithm that alternates between low-rank matrix completion and refining join candidate probabilities by leveraging Large Language Models. Our extensive experiments demonstrate that Nexus outperforms existing methods by a significant margin on four datasets including a real-world production dataset. Additionally, Nexus can operate in a fast mode, providing comparable results with up to 6x speedup, offering a practical and efficient solution for real-world deployments.
Singularity-Free Lie Group Integration and Geometrically Consistent Evaluation of Multibody System Models Described in Terms of Standard Absolute Coordinates
Jan 29, 2026A classical approach to the multibody systems (MBS) modeling is to use absolute coordinates, i.e., a set of (possibly redundant) coordinates that describe the absolute position and orientation of the individual bodies with respect to an inertial frame (IFR). A well-known problem for the time integration of the equations of motion (EOM) is the lack of a singularity-free parameterization of spatial motions, which is usually tackled by using unit quaternions. Lie group integration methods were proposed as an alternative approach to the singularity-free time integration. At the same time, Lie group formulations of EOM naturally respect the geometry of spatial motions during integration. Lie group integration methods, operating directly on the configuration space Lie group, are incompatible with standard formulations of the EOM, and cannot be implemented in existing MBS simulation codes without a major restructuring. The contribution of this paper is twofold: (1) A framework for interfacing Lie group integrators to standard EOM formulations is presented. It allows describing MBS in terms of various absolute coordinates and at the same using Lie group integration schemes. (2) A method for consistently incorporating the geometry of rigid body motions into the evaluation of EOM in absolute coordinates integrated with standard vector space integration schemes. The direct product group and the semidirect product group SO(3)xR3 and the semidirect product group SE(3) are used for representing rigid body motions. The key element is the local-global transitions (LGT) transition map, which facilitates the update of (global) absolute coordinates in terms of the (local) coordinates on the Lie group. This LGT map is specific to the absolute coordinates, the local coordinates on the Lie group, and the Lie group used to represent rigid body configurations.
* 10 pages
An Automated Tape Laying System Employing a Uniaxial Force Control Device
Oct 27, 2025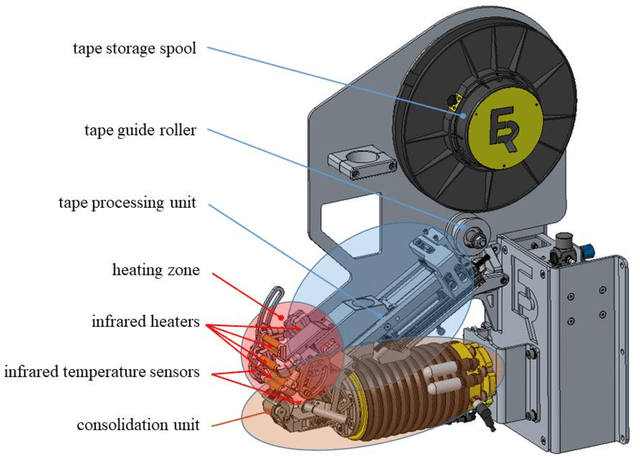
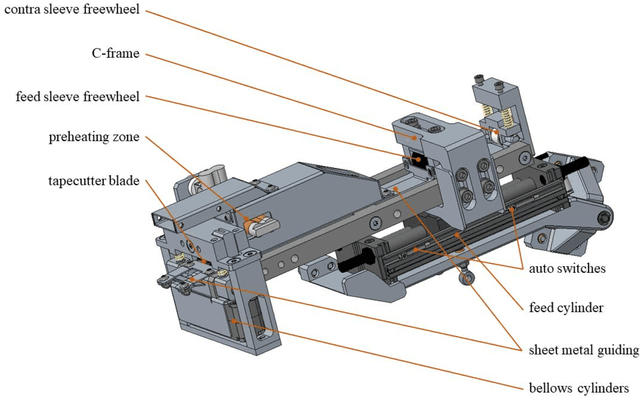
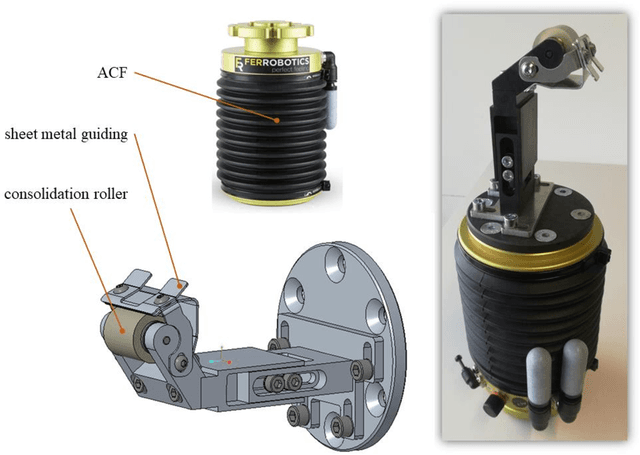

This paper deals with the design of a cost effective automated tape laying system (ATL system) with integrated uniaxial force control to ensure the necessary compaction forces as well as with an accurate temperature control to guarantee the used tape being melted appropriate. It is crucial to control the substrate and the oncoming tape onto a specific temperature level to ensure an optimal consolidation between the different layers of the product. Therefore, it takes several process steps from the spooled tape on the coil until it is finally tacked onto the desired mold. The different modules are divided into the tape storage spool, a tape-guiding roller, a tape processing unit, a heating zone and the consolidation unit. Moreover, a special robot control concept for testing the ATL system is presented. In contrast to many other systems, with this approach, the tape laying device is spatially fixed and the shape is moved accordingly by the robot, which allows for handling of rather compact and complex shapes. The functionality of the subsystems and the taping process itself was finally approved in experimental results using a carbon fiber reinforced HDPE tape.
Robot Path and Trajectory Planning Considering a Spatially Fixed TCP
Oct 23, 2025This paper presents a method for planning a trajectory in workspace coordinates using a spatially fixed tool center point (TCP), while taking into account the processing path on a part. This approach is beneficial if it is easier to move the part rather than moving the tool. Whether a mathematical description that defines the shape to be processed or single points from a design program are used, the robot path is finally represented using B-splines. The use of splines enables the path to be continuous with a desired degree, which finally leads to a smooth robot trajectory. While calculating the robot trajectory through prescribed orientation, additionally a given velocity at the TCP has to be considered. The procedure was validated on a real system using an industrial robot moving an arbitrary defined part.
A Parameter-Linear Formulation of the Optimal Path Following Problem for Robotic Manipulator
Oct 23, 2025In this paper the computational challenges of time-optimal path following are addressed. The standard approach is to minimize the travel time, which inevitably leads to singularities at zero path speed, when reformulating the optimization problem in terms of a path parameter. Thus, smooth trajectory generation while maintaining a low computational effort is quite challenging, since the singularities have to be taken into account. To this end, a different approach is presented in this paper. This approach is based on maximizing the path speed along a prescribed path. Furthermore, the approach is capable of planning smooth trajectories numerically efficient. Moreover, the discrete reformulation of the underlying problem is linear in optimization variables.
Simultaneous Stiffness and Trajectory Optimization for Energy Minimization of Pick-and-Place Tasks of SEA-Actuated Parallel Kinematic Manipulators
Oct 23, 2025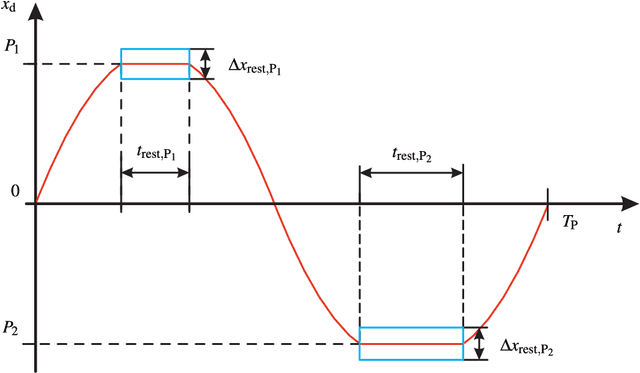
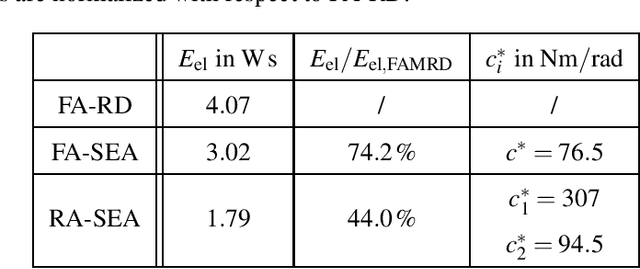
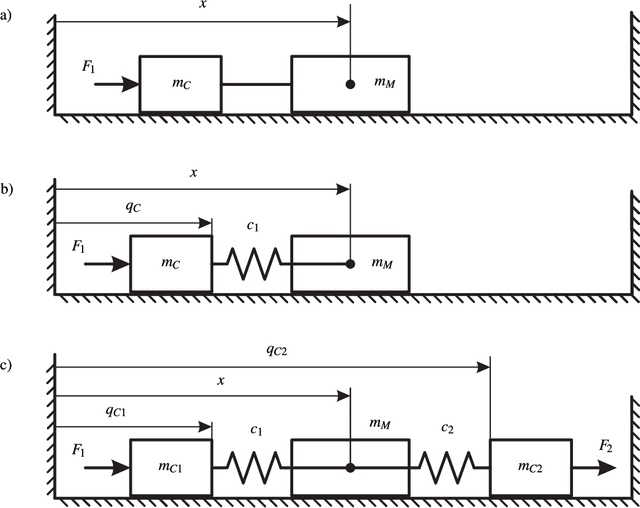
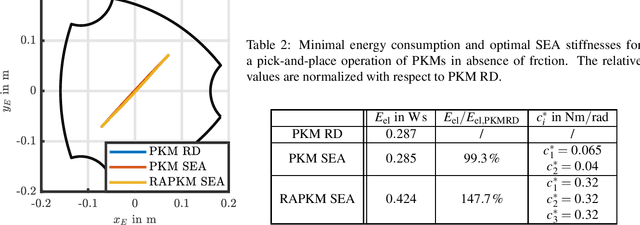
A major field of industrial robot applications deals with repetitive tasks that alternate between operating points. For these so-called pick-and-place operations, parallel kinematic manipulators (PKM) are frequently employed. These tasks tend to automatically run for a long period of time and therefore minimizing energy consumption is always of interest. Recent research addresses this topic by the use of elastic elements and particularly series elastic actuators (SEA). This paper explores the possibilities of minimizing energy consumption of SEA actuated PKM performing pick-and-place tasks. The basic idea is to excite eigenmotions that result from the actuator springs and exploit their oscillating characteristics. To this end, a prescribed cyclic pick-and-place operation is analyzed and a dynamic model of SEA driven PKM is derived. Subsequently, an energy minimizing optimal control problem is formulated where operating trajectories as well as SEA stiffnesses are optimized simultaneously. Here, optimizing the actuator stiffness does not account for variable stiffness actuators. It serves as a tool for the design and dimensioning process. The hypothesis on energy reduction is tested on two (parallel) robot applications where redundant actuation is also addressed. The results confirm the validity of this approach.
Wohlhart's Three-Loop Mechanism: An Overconstrained and Shaky Linkage
Sep 18, 2025This paper revisits a three-loop spatial linkage that was proposed in an ARK 2004 paper by Karl Wohlhart (as extension of a two-loop linkage proposed by Eddie Baker in 1980) and later analyzed in an ARK 2006 paper by Diez-Martinez et. al. A local analysis shows that this linkage has a finite degree of freedom (DOF) 3 (and is thus overconstrained) while in its reference configuration the differential DOF is 5. It is shown that its configuration space is locally a smooth manifold so that the reference configuration is not a c-space singularity. It is shown that the differential DOF is locally constant, which makes this linkage shaky (so that the reference configuration is not a singularity). The higher-order local analysis is facilitated by the computation of the kinematic tangent cone as well as a local approximation of the c-space.