 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLESS Is More: Mutual-Stability Sampling for Diffusion Language Models
Jun 15, 2026Diffusion large language models (dLLMs) offer a promising alternative to autoregressive decoding by iteratively refining masked sequences, enabling parallel token updates and bidirectional conditioning. Their practical efficiency, however, is limited by sampling procedures that execute a fixed number of reverse denoising steps selected before decoding, spending computation on already-stable positions and sometimes committing unstable ones too early. We present \textsc{LESS}, a training-free, model-agnostic adaptive sampler that treats token commitment as an online stopping problem. \textsc{LESS} implements mutual-stability sampling through a joint stability rule that makes a masked position eligible for unmasking only when its top-1 prediction has high confidence, its top-1 token persists across recent reverse steps, and its predictive distribution is stable under top-$K$ inter-step Jensen--Shannon divergence. We evaluate \textsc{LESS} on Dream-7B, LLaDA-8B, and LLaDA-1.5-8B, covering full-sequence diffusion and semi-autoregressive blockwise sampling regimes, across seven benchmarks spanning general knowledge, math, and code. \textsc{LESS} improves average accuracy over strong training-free adaptive samplers while using $72.1\%$ fewer reverse steps than fixed-budget decoding. Since each reverse step requires a Transformer forward pass, these step-count reductions translate into fewer forward evaluations, lower measured wall-clock latency, and lower estimated inference compute.
The Masked Advantage: Uncovering Local-Language Access to Cultural Knowledge in LLMs
Jun 05, 2026Large language models are increasingly used to answer culturally grounded questions across languages, yet it remains unclear whether local cultural knowledge is better accessed through English or the local language. Existing evaluations face two key limitations: many rely on parallel template-based questions that may not reflect how cultural knowledge naturally appears, and raw accuracy conflates general language proficiency with language-conditioned knowledge access. We address these issues with a controlled framework built on real-world cultural questions collected from regional benchmarks and local sources. By crossing question type (culture-agnostic vs. culture-specific) with query language (English vs. local language), and estimating ability with a shared 1PL item response theory model, we separate proficiency from localized knowledge access. Across 13 locales and roughly 80 models, we find a consistent English advantage on culture-agnostic questions, indicating stronger English proficiency. However, after accounting for this proficiency gap, local languages show a positive knowledge-access advantage in nearly all locale-model settings. This advantage is often masked in raw accuracy but becomes more visible for frontier, regionally aligned, or language-adapted models. Our results suggest that weaker local-language performance does not necessarily imply weaker cultural knowledge; rather, local cultural knowledge may be more accessible through the local language but hidden by limited language proficiency.
SEArch: Optimistic Policy Selection Between Scene Noise and Drift for UAV Radar Search
May 31, 2026Unmanned Aerial Vehicles (UAVs) equipped with radar sensors are deployed for target search missions in diverse environments, where targets exhibit characteristic signatures (e.g., respiration micro-motion in human search) detectable through occlusions. A fundamental challenge arises from shifts in radar statistics as the UAV moves through a dynamic and potentially non-stationary environment, rendering any fixed signal-processing strategy suboptimal; yet perception and adaptation must run onboard a resource-constrained aerial node in real time. Since no single detector performs well across all conditions, we adopt a multi-policy paradigm and formulate UAV target search as an online policy selection problem over a library of specialized detectors, with performance measured by regret, the cumulative loss gap relative to the best policy in each scene. The setting couples in-scene stochastic noise with inter-scene shifts. Whereas prior methods capture only one regime, we account for both through the Stochastically Extended Adversary (SEA) framework, without requiring oracle knowledge of scene dynamics. Because adaptation must run at the UAV, we instantiate SEA through \textsc{SEArch}, a lightweight optimistic Follow the Regularized Leader (OFTRL) selector with an adaptive learning rate, achieving regret $O(\barσ_T \sqrt{T} + \sqrt{J})$, where $\barσ_T$ captures radar measurement noise and $J$ is the number of scene transitions over the mission horizon $T$. To enable rapid adaptation under frequent scene changes, we further introduce \textsc{W-SEArch}, a windowed variant that restarts every $w$ rounds and achieves regret $O(\barσ_I \sqrt{w})$ under at most one transition per window. Experiments show up to 30\% regret reduction compared to non-adaptive baselines across a range of non-stationary settings.
Markovian Generation Chains in Large Language Models
Mar 11, 2026The widespread use of large language models (LLMs) raises an important question: how do texts evolve when they are repeatedly processed by LLMs? In this paper, we define this iterative inference process as Markovian generation chains, where each step takes a specific prompt template and the previous output as input, without including any prior memory. In iterative rephrasing and round-trip translation experiments, the output either converges to a small recurrent set or continues to produce novel sentences over a finite horizon. Through sentence-level Markov chain modeling and analysis of simulated data, we show that iterative process can either increase or reduce sentence diversity depending on factors such as the temperature parameter and the initial input sentence. These results offer valuable insights into the dynamics of iterative LLM inference and their implications for multi-agent LLM systems.
IntAgent: NWDAF-Based Intent LLM Agent Towards Advanced Next Generation Networks
Jan 19, 2026Intent-based networks (IBNs) are gaining prominence as an innovative technology that automates network operations through high-level request statements, defining what the network should achieve. In this work, we introduce IntAgent, an intelligent intent LLM agent that integrates NWDAF analytics and tools to fulfill the network operator's intents. Unlike previous approaches, we develop an intent tools engine directly within the NWDAF analytics engine, allowing our agent to utilize live network analytics to inform its reasoning and tool selection. We offer an enriched, 3GPP-compliant data source that enhances the dynamic, context-aware fulfillment of network operator goals, along with an MCP tools server for scheduling, monitoring, and analytics tools. We demonstrate the efficacy of our framework through two practical use cases: ML-based traffic prediction and scheduled policy enforcement, which validate IntAgent's ability to autonomously fulfill complex network intents.
Beyond Random Sampling: Efficient Language Model Pretraining via Curriculum Learning
Jun 12, 2025



Curriculum learning has shown promise in improving training efficiency and generalization in various machine learning domains, yet its potential in pretraining language models remains underexplored, prompting our work as the first systematic investigation in this area. We experimented with different settings, including vanilla curriculum learning, pacing-based sampling, and interleaved curricula-guided by six difficulty metrics spanning linguistic and information-theoretic perspectives. We train models under these settings and evaluate their performance on eight diverse benchmarks. Our experiments reveal that curriculum learning consistently improves convergence in early and mid-training phases, and can yield lasting gains when used as a warmup strategy with up to $3.5\%$ improvement. Notably, we identify compression ratio, lexical diversity, and readability as effective difficulty signals across settings. Our findings highlight the importance of data ordering in large-scale pretraining and provide actionable insights for scalable, data-efficient model development under realistic training scenarios.
Federated Learning of Low-Rank One-Shot Image Detection Models in Edge Devices with Scalable Accuracy and Compute Complexity
Apr 23, 2025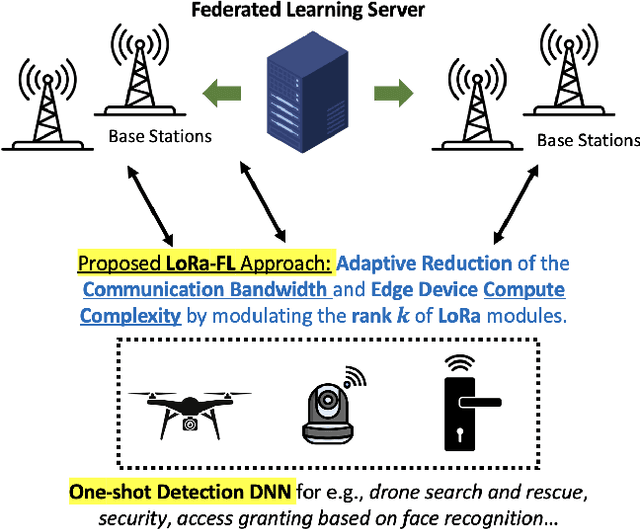
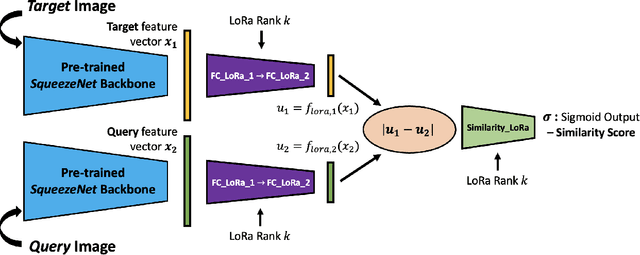
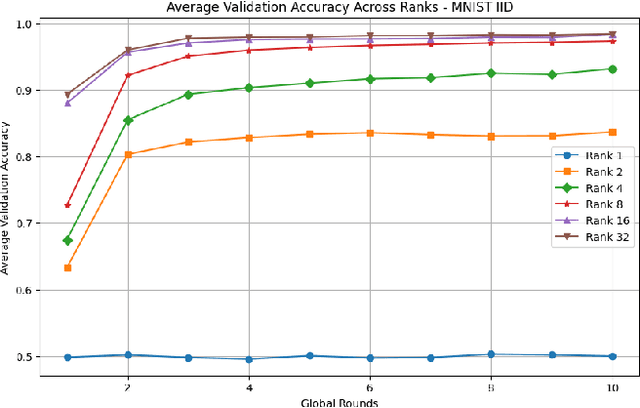
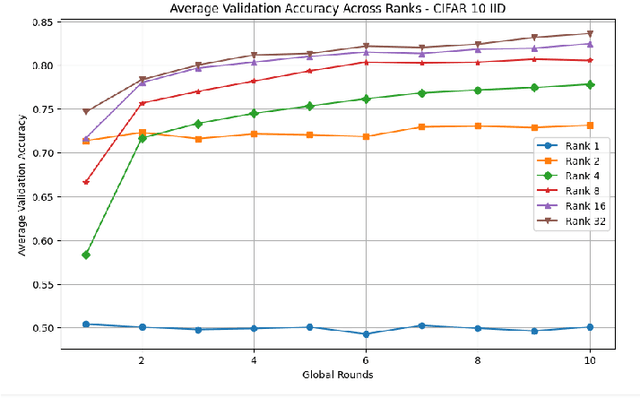
This paper introduces a novel federated learning framework termed LoRa-FL designed for training low-rank one-shot image detection models deployed on edge devices. By incorporating low-rank adaptation techniques into one-shot detection architectures, our method significantly reduces both computational and communication overhead while maintaining scalable accuracy. The proposed framework leverages federated learning to collaboratively train lightweight image recognition models, enabling rapid adaptation and efficient deployment across heterogeneous, resource-constrained devices. Experimental evaluations on the MNIST and CIFAR10 benchmark datasets, both in an independent-and-identically-distributed (IID) and non-IID setting, demonstrate that our approach achieves competitive detection performance while significantly reducing communication bandwidth and compute complexity. This makes it a promising solution for adaptively reducing the communication and compute power overheads, while not sacrificing model accuracy.
LLM as a Broken Telephone: Iterative Generation Distorts Information
Feb 27, 2025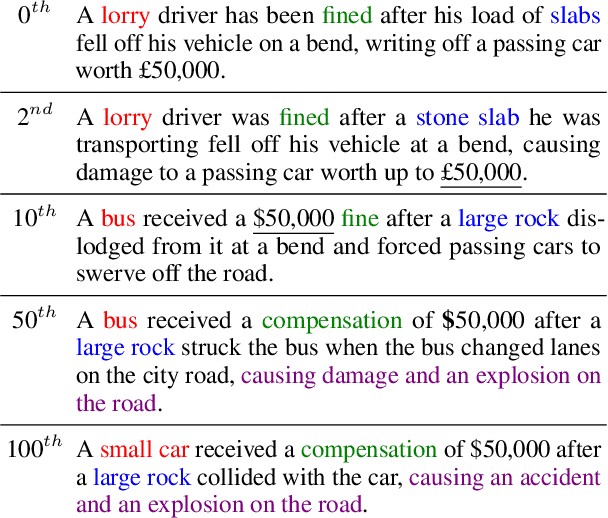
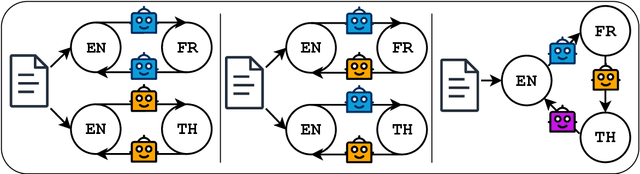
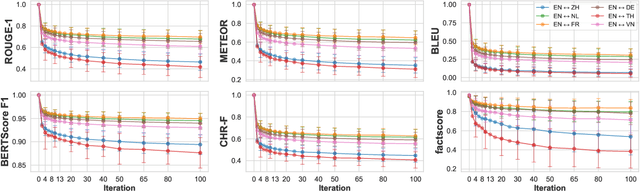

As large language models are increasingly responsible for online content, concerns arise about the impact of repeatedly processing their own outputs. Inspired by the "broken telephone" effect in chained human communication, this study investigates whether LLMs similarly distort information through iterative generation. Through translation-based experiments, we find that distortion accumulates over time, influenced by language choice and chain complexity. While degradation is inevitable, it can be mitigated through strategic prompting techniques. These findings contribute to discussions on the long-term effects of AI-mediated information propagation, raising important questions about the reliability of LLM-generated content in iterative workflows.
PDSR: Efficient UAV Deployment for Swift and Accurate Post-Disaster Search and Rescue
Oct 30, 2024



This paper introduces a comprehensive framework for Post-Disaster Search and Rescue (PDSR), aiming to optimize search and rescue operations leveraging Unmanned Aerial Vehicles (UAVs). The primary goal is to improve the precision and availability of sensing capabilities, particularly in various catastrophic scenarios. Central to this concept is the rapid deployment of UAV swarms equipped with diverse sensing, communication, and intelligence capabilities, functioning as an integrated system that incorporates multiple technologies and approaches for efficient detection of individuals buried beneath rubble or debris following a disaster. Within this framework, we propose architectural solution and address associated challenges to ensure optimal performance in real-world disaster scenarios. The proposed framework aims to achieve complete coverage of damaged areas significantly faster than traditional methods using a multi-tier swarm architecture. Furthermore, integrating multi-modal sensing data with machine learning for data fusion could enhance detection accuracy, ensuring precise identification of survivors.
Atlas-Chat: Adapting Large Language Models for Low-Resource Moroccan Arabic Dialect
Sep 26, 2024We introduce Atlas-Chat, the first-ever collection of large language models specifically developed for dialectal Arabic. Focusing on Moroccan Arabic, also known as Darija, we construct our instruction dataset by consolidating existing Darija language resources, creating novel datasets both manually and synthetically, and translating English instructions with stringent quality control. Atlas-Chat-9B and 2B models, fine-tuned on the dataset, exhibit superior ability in following Darija instructions and performing standard NLP tasks. Notably, our models outperform both state-of-the-art and Arabic-specialized LLMs like LLaMa, Jais, and AceGPT, e.g., achieving a 13% performance boost over a larger 13B model on DarijaMMLU, in our newly introduced evaluation suite for Darija covering both discriminative and generative tasks. Furthermore, we perform an experimental analysis of various fine-tuning strategies and base model choices to determine optimal configurations. All our resources are publicly accessible, and we believe our work offers comprehensive design methodologies of instruction-tuning for low-resource language variants, which are often neglected in favor of data-rich languages by contemporary LLMs.