 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMinimum-Time Planar Paths with up to Two Constant Acceleration Inputs and $L_2$ Velocity and Acceleration Constraints
Mar 07, 2024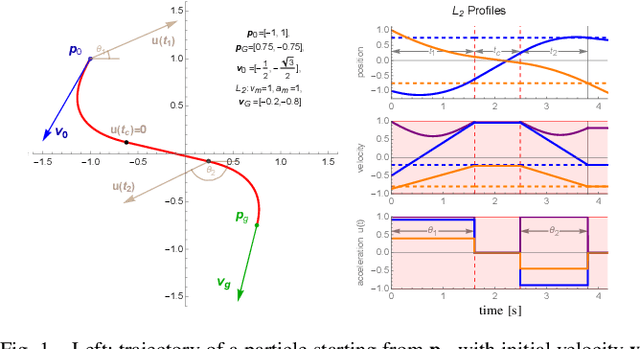
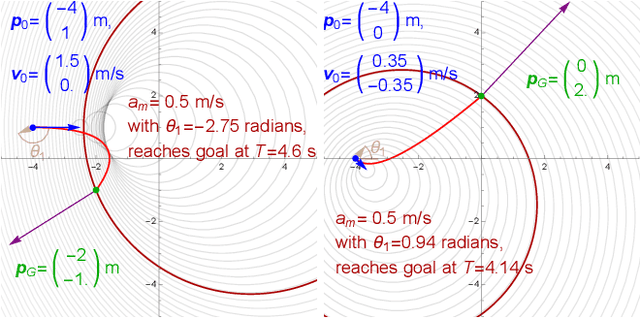
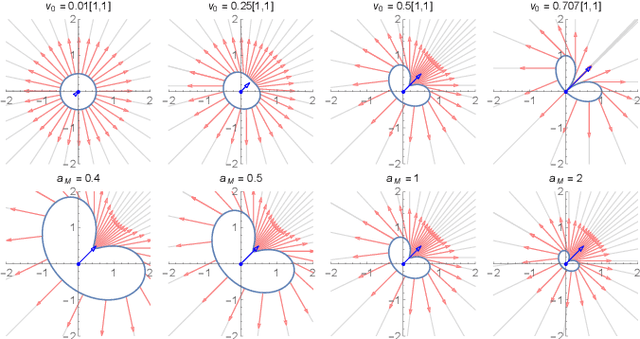
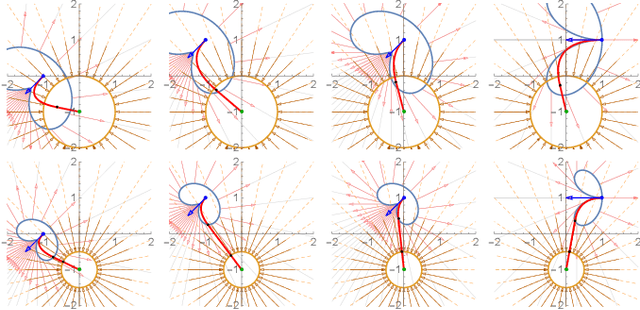
Given starting and ending positions and velocities, $L_2$ bounds on the acceleration and velocity, and the restriction to no more than two constant control inputs, this paper provides routines to compute the minimal-time path. Closed form solutions are provided for reaching a position in minimum time with and without a velocity bound, and for stopping at the goal position. A numeric solver is used to reach a goal position and velocity with no more than two constant control inputs. If a cruising phase at the terminal velocity is needed, this requires solving a non-linear equation with a single parameter. Code is provided on GitHub at https://github.com/RoboticSwarmControl/MinTimeL2pathsConstraints.
Intelligent DRL-Based Adaptive Region of Interest for Delay-sensitive Telemedicine Applications
Oct 08, 2023



Telemedicine applications have recently received substantial potential and interest, especially after the COVID-19 pandemic. Remote experience will help people get their complex surgery done or transfer knowledge to local surgeons, without the need to travel abroad. Even with breakthrough improvements in internet speeds, the delay in video streaming is still a hurdle in telemedicine applications. This imposes using image compression and region of interest (ROI) techniques to reduce the data size and transmission needs. This paper proposes a Deep Reinforcement Learning (DRL) model that intelligently adapts the ROI size and non-ROI quality depending on the estimated throughput. The delay and structural similarity index measure (SSIM) comparison are used to assess the DRL model. The comparison findings and the practical application reveal that DRL is capable of reducing the delay by 13% and keeping the overall quality in an acceptable range. Since the latency has been significantly reduced, these findings are a valuable enhancement to telemedicine applications.