Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMinimum-Time Planar Paths with up to Two Constant Acceleration Inputs and $L_2$ Velocity and Acceleration Constraints
Paper and Code
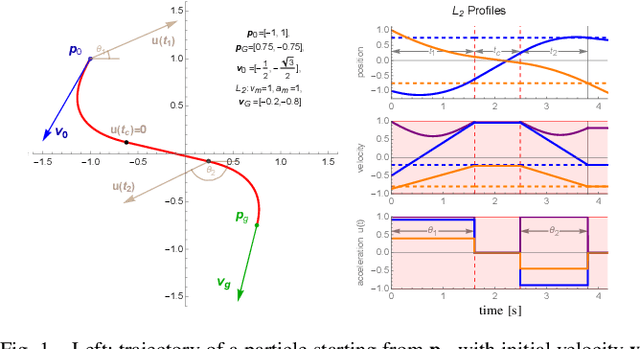
Given starting and ending positions and velocities, $L_2$ bounds on the acceleration and velocity, and the restriction to no more than two constant control inputs, this paper provides routines to compute the minimal-time path. Closed form solutions are provided for reaching a position in minimum time with and without a velocity bound, and for stopping at the goal position. A numeric solver is used to reach a goal position and velocity with no more than two constant control inputs. If a cruising phase at the terminal velocity is needed, this requires solving a non-linear equation with a single parameter. Code is provided on GitHub at https://github.com/RoboticSwarmControl/MinTimeL2pathsConstraints.
* 8 pages, 8 figures, accepted for presentation at ACC 2024,
https://acc2024.a2c2.org/
View paper on