 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeObject Depth and Size Estimation using Stereo-vision and Integration with SLAM
Sep 11, 2024



Autonomous robots use simultaneous localization and mapping (SLAM) for efficient and safe navigation in various environments. LiDAR sensors are integral in these systems for object identification and localization. However, LiDAR systems though effective in detecting solid objects (e.g., trash bin, bottle, etc.), encounter limitations in identifying semitransparent or non-tangible objects (e.g., fire, smoke, steam, etc.) due to poor reflecting characteristics. Additionally, LiDAR also fails to detect features such as navigation signs and often struggles to detect certain hazardous materials that lack a distinct surface for effective laser reflection. In this paper, we propose a highly accurate stereo-vision approach to complement LiDAR in autonomous robots. The system employs advanced stereo vision-based object detection to detect both tangible and non-tangible objects and then uses simple machine learning to precisely estimate the depth and size of the object. The depth and size information is then integrated into the SLAM process to enhance the robot's navigation capabilities in complex environments. Our evaluation, conducted on an autonomous robot equipped with LiDAR and stereo-vision systems demonstrates high accuracy in the estimation of an object's depth and size. A video illustration of the proposed scheme is available at: \url{https://www.youtube.com/watch?v=nusI6tA9eSk}.
Haris: an Advanced Autonomous Mobile Robot for Smart Parking Assistance
Jan 31, 2024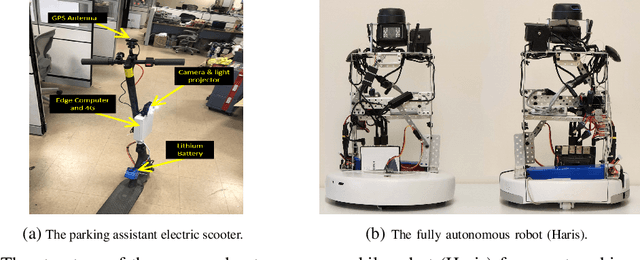
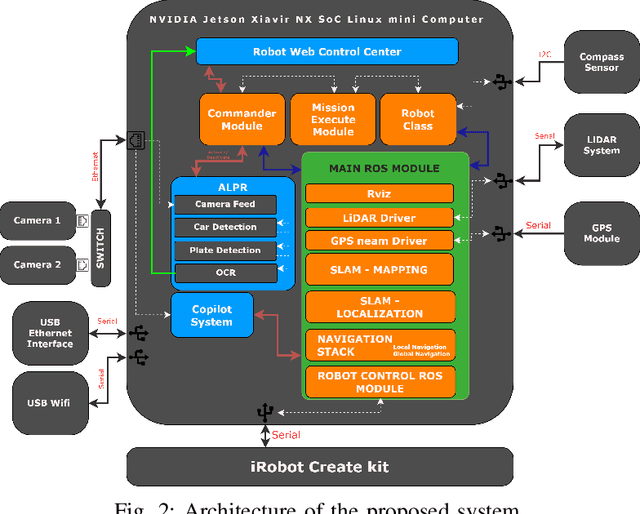
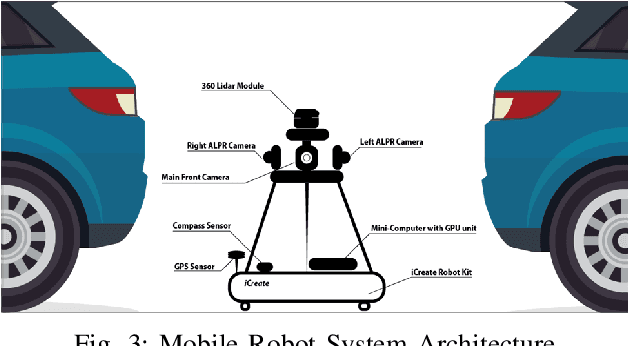
This paper presents Haris, an advanced autonomous mobile robot system for tracking the location of vehicles in crowded car parks using license plate recognition. The system employs simultaneous localization and mapping (SLAM) for autonomous navigation and precise mapping of the parking area, eliminating the need for GPS dependency. In addition, the system utilizes a sophisticated framework using computer vision techniques for object detection and automatic license plate recognition (ALPR) for reading and associating license plate numbers with location data. This information is subsequently synchronized with a back-end service and made accessible to users via a user-friendly mobile app, offering effortless vehicle location and alleviating congestion within the parking facility. The proposed system has the potential to improve the management of short-term large outdoor parking areas in crowded places such as sports stadiums. The demo of the robot can be found on https://youtu.be/ZkTCM35fxa0?si=QjggJuN7M1o3oifx.