 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWheat3DGS: In-field 3D Reconstruction, Instance Segmentation and Phenotyping of Wheat Heads with Gaussian Splatting
Apr 09, 2025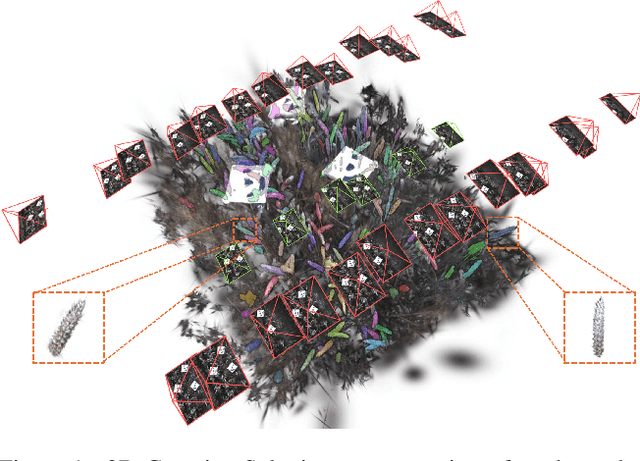
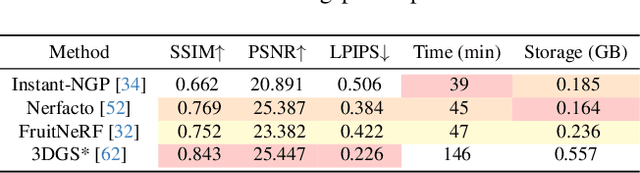
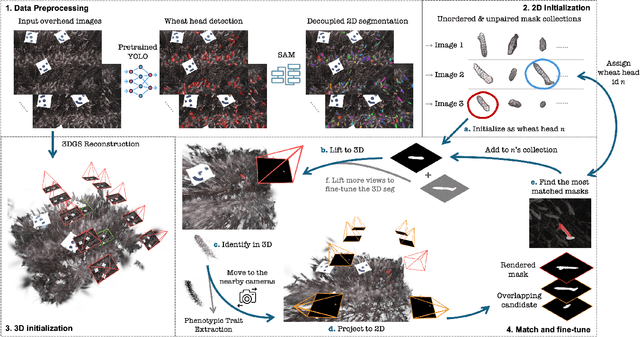

Automated extraction of plant morphological traits is crucial for supporting crop breeding and agricultural management through high-throughput field phenotyping (HTFP). Solutions based on multi-view RGB images are attractive due to their scalability and affordability, enabling volumetric measurements that 2D approaches cannot directly capture. While advanced methods like Neural Radiance Fields (NeRFs) have shown promise, their application has been limited to counting or extracting traits from only a few plants or organs. Furthermore, accurately measuring complex structures like individual wheat heads-essential for studying crop yields-remains particularly challenging due to occlusions and the dense arrangement of crop canopies in field conditions. The recent development of 3D Gaussian Splatting (3DGS) offers a promising alternative for HTFP due to its high-quality reconstructions and explicit point-based representation. In this paper, we present Wheat3DGS, a novel approach that leverages 3DGS and the Segment Anything Model (SAM) for precise 3D instance segmentation and morphological measurement of hundreds of wheat heads automatically, representing the first application of 3DGS to HTFP. We validate the accuracy of wheat head extraction against high-resolution laser scan data, obtaining per-instance mean absolute percentage errors of 15.1%, 18.3%, and 40.2% for length, width, and volume. We provide additional comparisons to NeRF-based approaches and traditional Muti-View Stereo (MVS), demonstrating superior results. Our approach enables rapid, non-destructive measurements of key yield-related traits at scale, with significant implications for accelerating crop breeding and improving our understanding of wheat development.
Data-Centric Digital Agriculture: A Perspective
Dec 06, 2023



In response to the increasing global demand for food, feed, fiber, and fuel, digital agriculture is rapidly evolving to meet these demands while reducing environmental impact. This evolution involves incorporating data science, machine learning, sensor technologies, robotics, and new management strategies to establish a more sustainable agricultural framework. So far, machine learning research in digital agriculture has predominantly focused on model-centric approaches, focusing on model design and evaluation. These efforts aim to optimize model accuracy and efficiency, often treating data as a static benchmark. Despite the availability of agricultural data and methodological advancements, a saturation point has been reached, with many established machine learning methods achieving comparable levels of accuracy and facing similar limitations. To fully realize the potential of digital agriculture, it is crucial to have a comprehensive understanding of the role of data in the field and to adopt data-centric machine learning. This involves developing strategies to acquire and curate valuable data and implementing effective learning and evaluation strategies that utilize the intrinsic value of data. This approach has the potential to create accurate, generalizable, and adaptable machine learning methods that effectively and sustainably address agricultural tasks such as yield prediction, weed detection, and early disease identification
Building an Aerial-Ground Robotics System for Precision Farming
Nov 08, 2019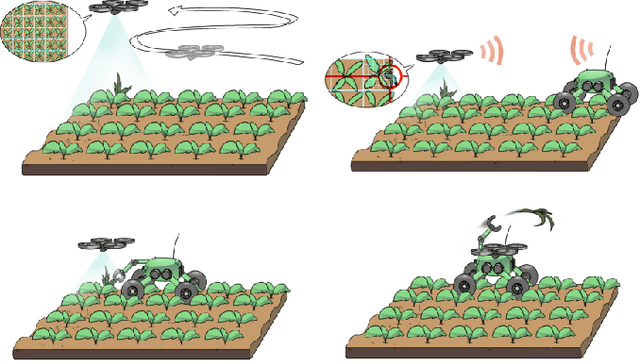
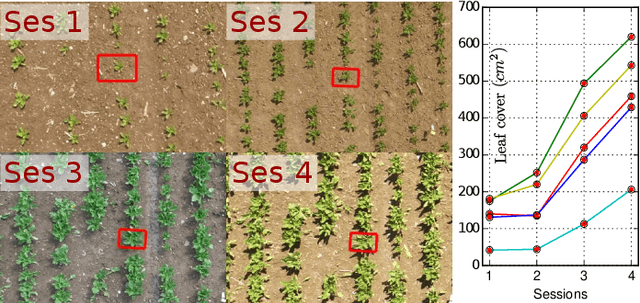
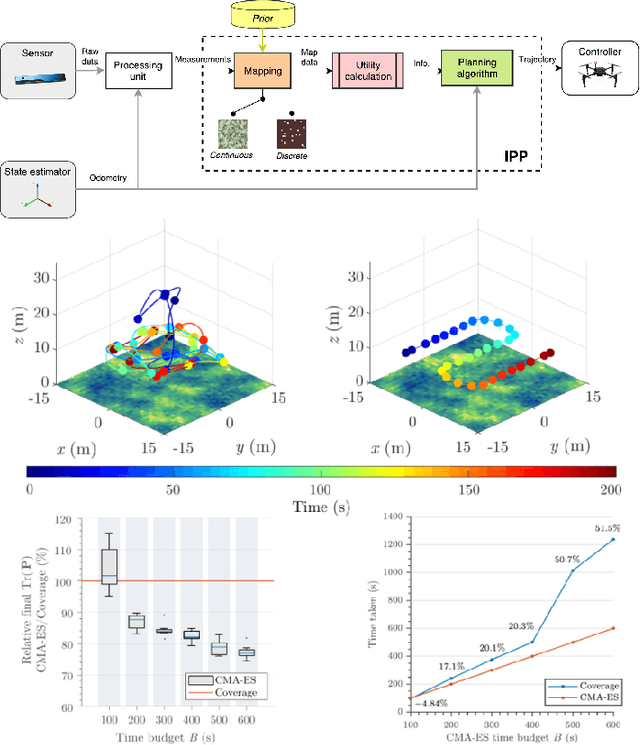
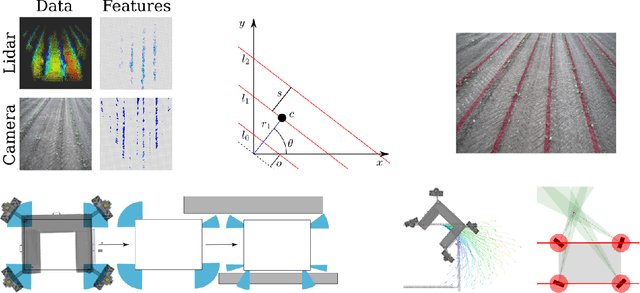
The application of autonomous robots in agriculture is gaining more and more popularity thanks to the high impact it may have on food security, sustainability, resource use efficiency, reduction of chemical treatments, minimization of the human effort and maximization of yield. The Flourish research project faced this challenge by developing an adaptable robotic solution for precision farming that combines the aerial survey capabilities of small autonomous unmanned aerial vehicles (UAVs) with flexible targeted intervention performed by multi-purpose agricultural unmanned ground vehicles (UGVs). This paper presents an exhaustive overview of the scientific and technological advances and outcomes obtained in the Flourish project. We introduce multi-spectral perception algorithms and aerial and ground based systems developed to monitor crop density, weed pressure, crop nitrogen nutrition status, and to accurately classify and locate weeds. We then introduce the navigation and mapping systems to deal with the specificity of the employed robots and of the agricultural environment, highlighting the collaborative modules that enable the UAVs and UGVs to collect and share information in a unified environment model. We finally present the ground intervention hardware, software solutions, and interfaces we implemented and tested in different field conditions and with different crops. We describe here a real use case in which a UAV collaborates with a UGV to monitor the field and to perform selective spraying treatments in a totally autonomous way.
WeedMap: A large-scale semantic weed mapping framework using aerial multispectral imaging and deep neural network for precision farming
Sep 06, 2018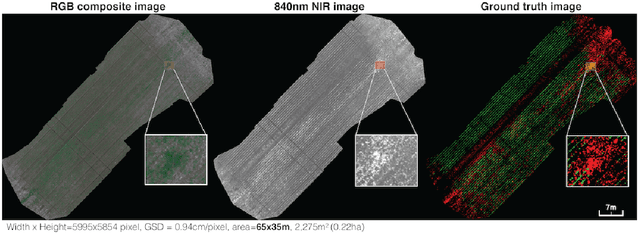
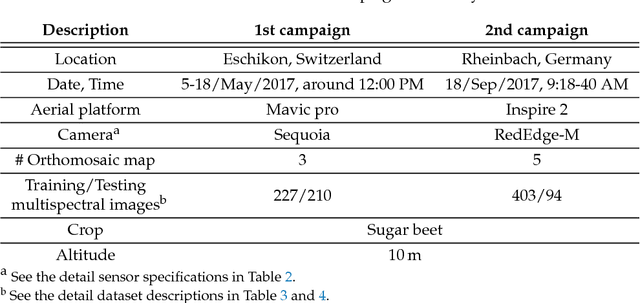
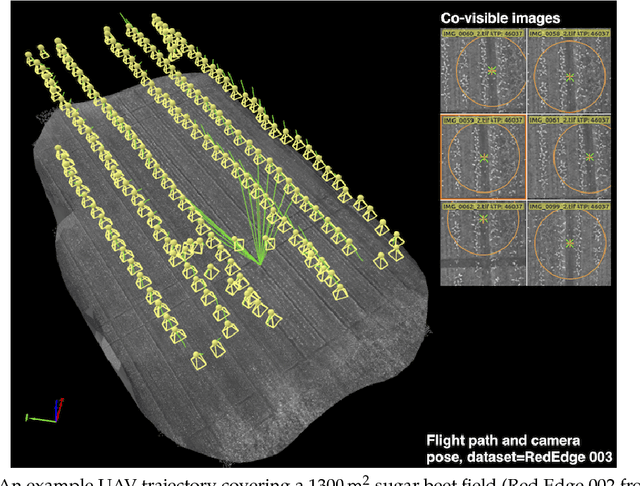
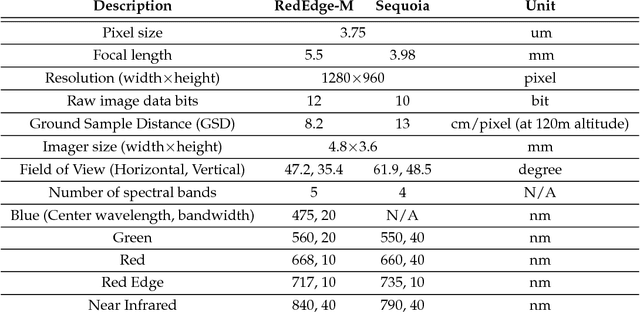
We present a novel weed segmentation and mapping framework that processes multispectral images obtained from an unmanned aerial vehicle (UAV) using a deep neural network (DNN). Most studies on crop/weed semantic segmentation only consider single images for processing and classification. Images taken by UAVs often cover only a few hundred square meters with either color only or color and near-infrared (NIR) channels. Computing a single large and accurate vegetation map (e.g., crop/weed) using a DNN is non-trivial due to difficulties arising from: (1) limited ground sample distances (GSDs) in high-altitude datasets, (2) sacrificed resolution resulting from downsampling high-fidelity images, and (3) multispectral image alignment. To address these issues, we adopt a stand sliding window approach that operates on only small portions of multispectral orthomosaic maps (tiles), which are channel-wise aligned and calibrated radiometrically across the entire map. We define the tile size to be the same as that of the DNN input to avoid resolution loss. Compared to our baseline model (i.e., SegNet with 3 channel RGB inputs) yielding an area under the curve (AUC) of [background=0.607, crop=0.681, weed=0.576], our proposed model with 9 input channels achieves [0.839, 0.863, 0.782]. Additionally, we provide an extensive analysis of 20 trained models, both qualitatively and quantitatively, in order to evaluate the effects of varying input channels and tunable network hyperparameters. Furthermore, we release a large sugar beet/weed aerial dataset with expertly guided annotations for further research in the fields of remote sensing, precision agriculture, and agricultural robotics.