 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCombiNeRF: A Combination of Regularization Techniques for Few-Shot Neural Radiance Field View Synthesis
Mar 21, 2024Neural Radiance Fields (NeRFs) have shown impressive results for novel view synthesis when a sufficiently large amount of views are available. When dealing with few-shot settings, i.e. with a small set of input views, the training could overfit those views, leading to artifacts and geometric and chromatic inconsistencies in the resulting rendering. Regularization is a valid solution that helps NeRF generalization. On the other hand, each of the most recent NeRF regularization techniques aim to mitigate a specific rendering problem. Starting from this observation, in this paper we propose CombiNeRF, a framework that synergically combines several regularization techniques, some of them novel, in order to unify the benefits of each. In particular, we regularize single and neighboring rays distributions and we add a smoothness term to regularize near geometries. After these geometric approaches, we propose to exploit Lipschitz regularization to both NeRF density and color networks and to use encoding masks for input features regularization. We show that CombiNeRF outperforms the state-of-the-art methods with few-shot settings in several publicly available datasets. We also present an ablation study on the LLFF and NeRF-Synthetic datasets that support the choices made. We release with this paper the open-source implementation of our framework.
* This paper has been accepted for publication at the 2024 International Conference on 3D Vision (3DV)
Pushing the Limits of Learning-based Traversability Analysis for Autonomous Driving on CPU
Jun 07, 2022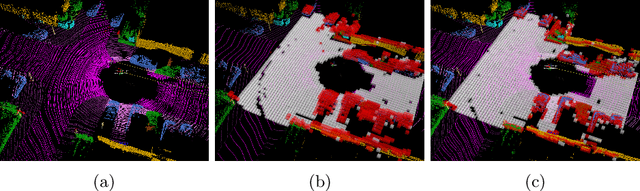
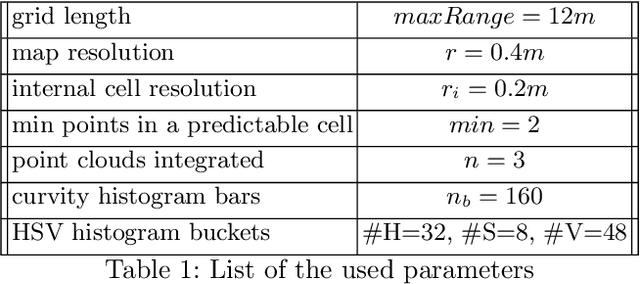
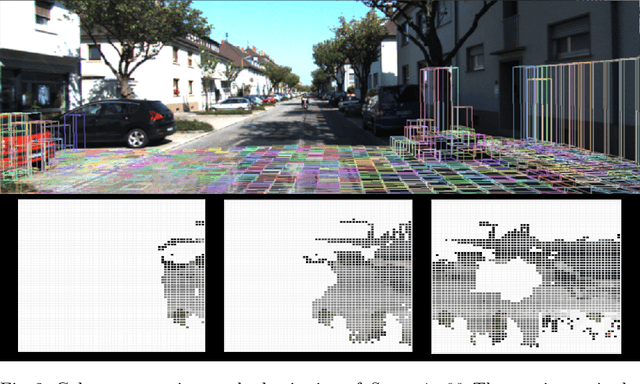
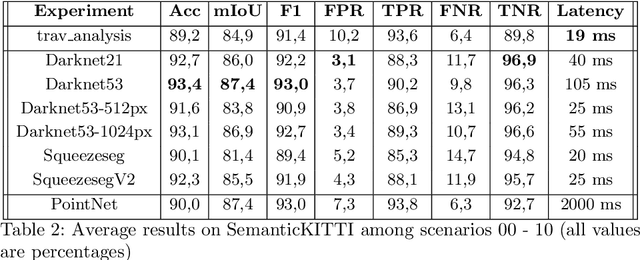
Self-driving vehicles and autonomous ground robots require a reliable and accurate method to analyze the traversability of the surrounding environment for safe navigation. This paper proposes and evaluates a real-time machine learning-based Traversability Analysis method that combines geometric features with appearance-based features in a hybrid approach based on a SVM classifier. In particular, we show that integrating a new set of geometric and visual features and focusing on important implementation details enables a noticeable boost in performance and reliability. The proposed approach has been compared with state-of-the-art Deep Learning approaches on a public dataset of outdoor driving scenarios. It reaches an accuracy of 89.2% in scenarios of varying complexity, demonstrating its effectiveness and robustness. The method runs fully on CPU and reaches comparable results with respect to the other methods, operates faster, and requires fewer hardware resources.
Learning to Segment Human Body Parts with Synthetically Trained Deep Convolutional Networks
Feb 02, 2021
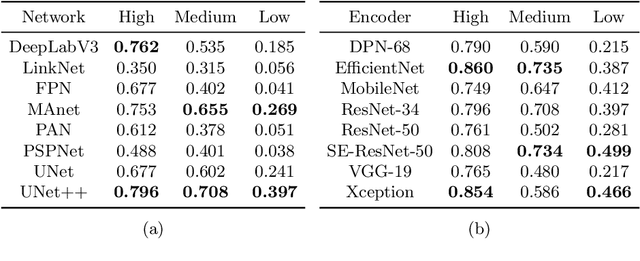
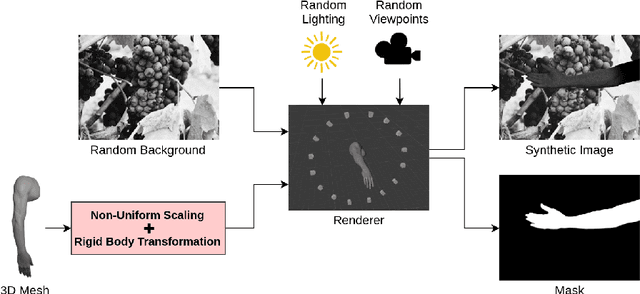

This paper presents a new framework for human body part segmentation based on Deep Convolutional Neural Networks trained using only synthetic data. The proposed approach achieves cutting-edge results without the need of training the models with real annotated data of human body parts. Our contributions include a data generation pipeline, that exploits a game engine for the creation of the synthetic data used for training the network, and a novel pre-processing module, that combines edge response map and adaptive histogram equalization to guide the network to learn the shape of the human body parts ensuring robustness to changes in the illumination conditions. For selecting the best candidate architecture, we performed exhaustive tests on manually-annotated images of real human body limbs. We further present an ablation study to validate our pre-processing module. The results show that our method outperforms several state-of-the-art semantic segmentation networks by a large margin. We release an implementation of the proposed approach along with the acquired datasets with this paper.
Building an Aerial-Ground Robotics System for Precision Farming
Nov 08, 2019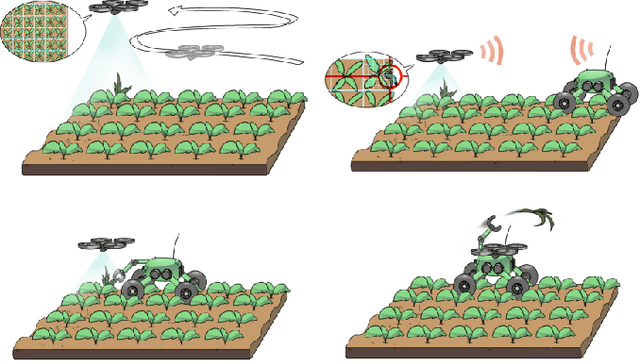
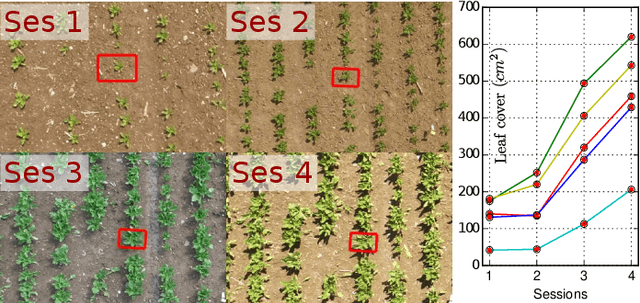
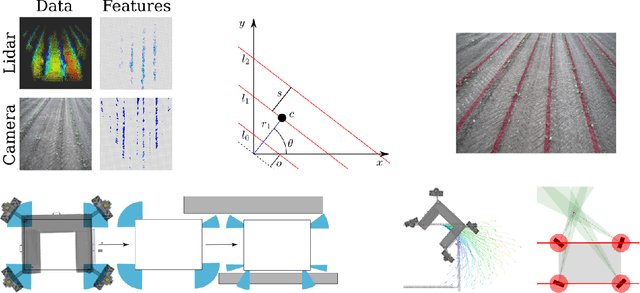
The application of autonomous robots in agriculture is gaining more and more popularity thanks to the high impact it may have on food security, sustainability, resource use efficiency, reduction of chemical treatments, minimization of the human effort and maximization of yield. The Flourish research project faced this challenge by developing an adaptable robotic solution for precision farming that combines the aerial survey capabilities of small autonomous unmanned aerial vehicles (UAVs) with flexible targeted intervention performed by multi-purpose agricultural unmanned ground vehicles (UGVs). This paper presents an exhaustive overview of the scientific and technological advances and outcomes obtained in the Flourish project. We introduce multi-spectral perception algorithms and aerial and ground based systems developed to monitor crop density, weed pressure, crop nitrogen nutrition status, and to accurately classify and locate weeds. We then introduce the navigation and mapping systems to deal with the specificity of the employed robots and of the agricultural environment, highlighting the collaborative modules that enable the UAVs and UGVs to collect and share information in a unified environment model. We finally present the ground intervention hardware, software solutions, and interfaces we implemented and tested in different field conditions and with different crops. We describe here a real use case in which a UAV collaborates with a UGV to monitor the field and to perform selective spraying treatments in a totally autonomous way.
An Effective Multi-Cue Positioning System for Agricultural Robotics
Sep 11, 2018
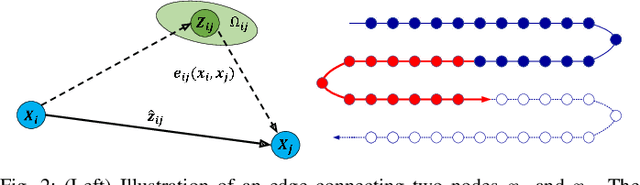

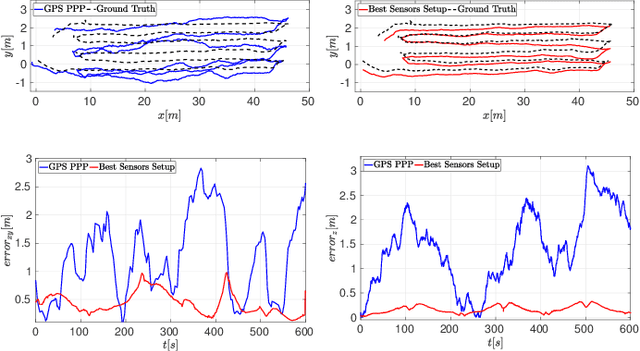
The self-localization capability is a crucial component for Unmanned Ground Vehicles (UGV) in farming applications. Approaches based solely on visual cues or on low-cost GPS are easily prone to fail in such scenarios. In this paper, we present a robust and accurate 3D global pose estimation framework, designed to take full advantage of heterogeneous sensory data. By modeling the pose estimation problem as a pose graph optimization, our approach simultaneously mitigates the cumulative drift introduced by motion estimation systems (wheel odometry, visual odometry, ...), and the noise introduced by raw GPS readings. Along with a suitable motion model, our system also integrates two additional types of constraints: (i) a Digital Elevation Model and (ii) a Markov Random Field assumption. We demonstrate how using these additional cues substantially reduces the error along the altitude axis and, moreover, how this benefit spreads to the other components of the state. We report exhaustive experiments combining several sensor setups, showing accuracy improvements ranging from 37% to 76% with respect to the exclusive use of a GPS sensor. We show that our approach provides accurate results even if the GPS unexpectedly changes positioning mode. The code of our system along with the acquired datasets are released with this paper.
Active Detection and Localization of Textureless Objects in Cluttered Environments
Mar 22, 2016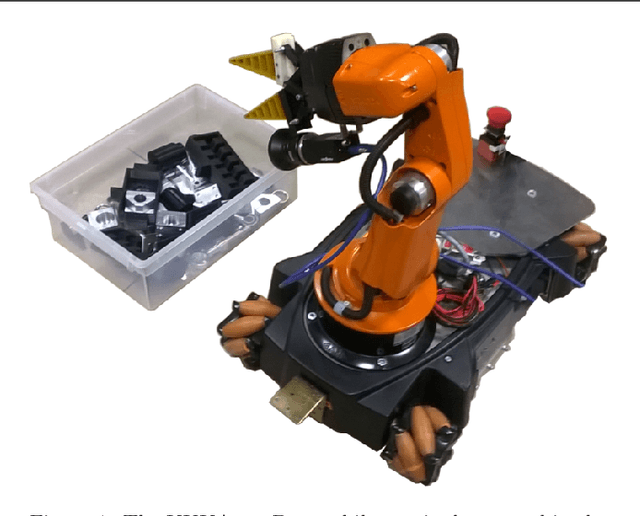

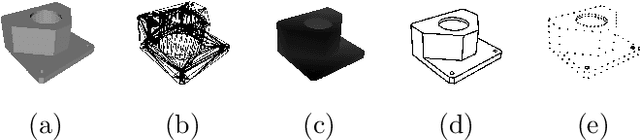

This paper introduces an active object detection and localization framework that combines a robust untextured object detection and 3D pose estimation algorithm with a novel next-best-view selection strategy. We address the detection and localization problems by proposing an edge-based registration algorithm that refines the object position by minimizing a cost directly extracted from a 3D image tensor that encodes the minimum distance to an edge point in a joint direction/location space. We face the next-best-view problem by exploiting a sequential decision process that, for each step, selects the next camera position which maximizes the mutual information between the state and the next observations. We solve the intrinsic intractability of this solution by generating observations that represent scene realizations, i.e. combination samples of object hypothesis provided by the object detector, while modeling the state by means of a set of constantly resampled particles. Experiments performed on different real world, challenging datasets confirm the effectiveness of the proposed methods.