 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHorticultural Temporal Fruit Monitoring via 3D Instance Segmentation and Re-Identification using Point Clouds
Nov 12, 2024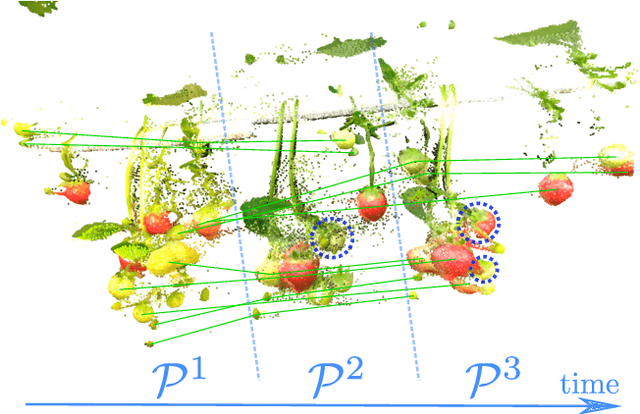
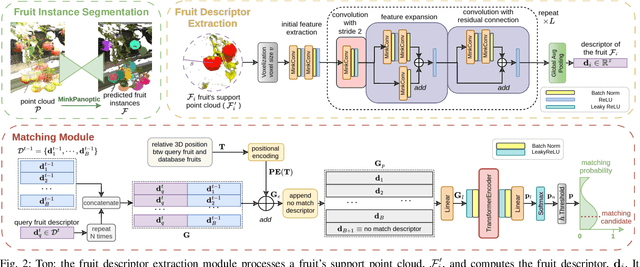
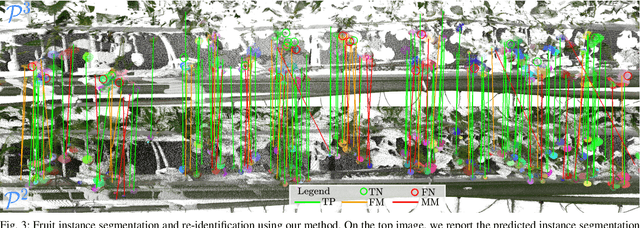
Robotic fruit monitoring is a key step toward automated agricultural production systems. Robots can significantly enhance plant and temporal fruit monitoring by providing precise, high-throughput assessments that overcome the limitations of traditional manual methods. Fruit monitoring is a challenging task due to the significant variation in size, shape, orientation, and occlusion of fruits. Also, fruits may be harvested or newly grown between recording sessions. Most methods are 2D image-based and they lack the 3D structure, depth, and spatial information, which represent key aspects of fruit monitoring. 3D colored point clouds, instead, can offer this information but they introduce challenges such as their sparsity and irregularity. In this paper, we present a novel approach for temporal fruit monitoring that addresses point clouds collected in a greenhouse over time. Our method segments fruits using a learning-based instance segmentation approach directly on the point cloud. Each segmented fruit is processed by a 3D sparse convolutional neural network to extract descriptors, which are used in an attention-based matching network to associate fruits with their instances from previous data collections. Experimental results on a real dataset of strawberries demonstrate that our approach outperforms other methods for fruits re-identification over time, allowing for precise temporal fruit monitoring in real and complex scenarios.
Exploiting Local Features and Range Images for Small Data Real-Time Point Cloud Semantic Segmentation
Oct 14, 2024



Semantic segmentation of point clouds is an essential task for understanding the environment in autonomous driving and robotics. Recent range-based works achieve real-time efficiency, while point- and voxel-based methods produce better results but are affected by high computational complexity. Moreover, highly complex deep learning models are often not suited to efficiently learn from small datasets. Their generalization capabilities can easily be driven by the abundance of data rather than the architecture design. In this paper, we harness the information from the three-dimensional representation to proficiently capture local features, while introducing the range image representation to incorporate additional information and facilitate fast computation. A GPU-based KDTree allows for rapid building, querying, and enhancing projection with straightforward operations. Extensive experiments on SemanticKITTI and nuScenes datasets demonstrate the benefits of our modification in a ``small data'' setup, in which only one sequence of the dataset is used to train the models, but also in the conventional setup, where all sequences except one are used for training. We show that a reduced version of our model not only demonstrates strong competitiveness against full-scale state-of-the-art models but also operates in real-time, making it a viable choice for real-world case applications. The code of our method is available at https://github.com/Bender97/WaffleAndRange.
A Sonar-based AUV Positioning System for Underwater Environments with Low Infrastructure Density
May 03, 2024The increasing demand for underwater vehicles highlights the necessity for robust localization solutions in inspection missions. In this work, we present a novel real-time sonar-based underwater global positioning algorithm for AUVs (Autonomous Underwater Vehicles) designed for environments with a sparse distribution of human-made assets. Our approach exploits two synergistic data interpretation frontends applied to the same stream of sonar data acquired by a multibeam Forward-Looking Sonar (FSD). These observations are fused within a Particle Filter (PF) either to weigh more particles that belong to high-likelihood regions or to solve symmetric ambiguities. Preliminary experiments carried out on a simulated environment resembling a real underwater plant provided promising results. This work represents a starting point towards future developments of the method and consequent exhaustive evaluations also in real-world scenarios.
* Accepted to the IEEE ICRA Workshop on Field Robotics 2024
Improving Generalization of Synthetically Trained Sonar Image Descriptors for Underwater Place Recognition
Aug 02, 2023Autonomous navigation in underwater environments presents challenges due to factors such as light absorption and water turbidity, limiting the effectiveness of optical sensors. Sonar systems are commonly used for perception in underwater operations as they are unaffected by these limitations. Traditional computer vision algorithms are less effective when applied to sonar-generated acoustic images, while convolutional neural networks (CNNs) typically require large amounts of labeled training data that are often unavailable or difficult to acquire. To this end, we propose a novel compact deep sonar descriptor pipeline that can generalize to real scenarios while being trained exclusively on synthetic data. Our architecture is based on a ResNet18 back-end and a properly parameterized random Gaussian projection layer, whereas input sonar data is enhanced with standard ad-hoc normalization/prefiltering techniques. A customized synthetic data generation procedure is also presented. The proposed method has been evaluated extensively using both synthetic and publicly available real data, demonstrating its effectiveness compared to state-of-the-art methods.
Pushing the Limits of Learning-based Traversability Analysis for Autonomous Driving on CPU
Jun 07, 2022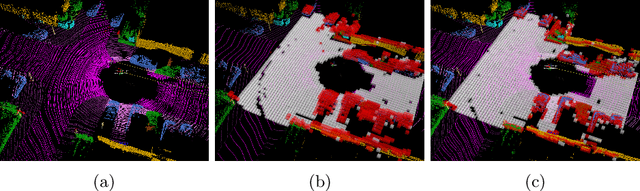
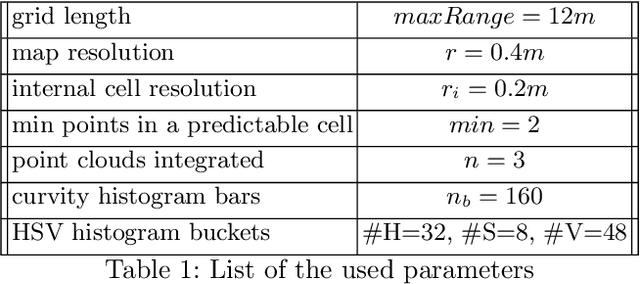
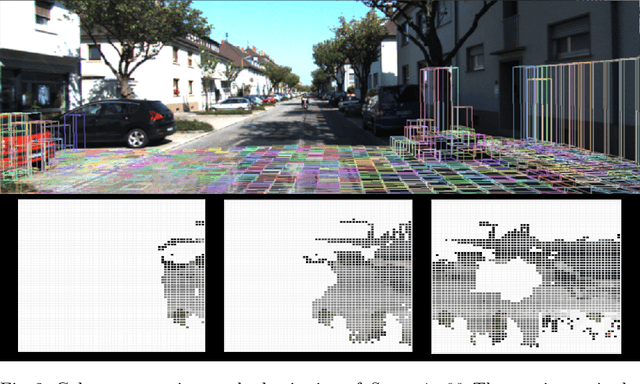
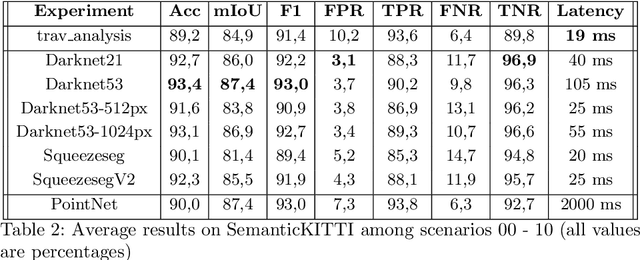
Self-driving vehicles and autonomous ground robots require a reliable and accurate method to analyze the traversability of the surrounding environment for safe navigation. This paper proposes and evaluates a real-time machine learning-based Traversability Analysis method that combines geometric features with appearance-based features in a hybrid approach based on a SVM classifier. In particular, we show that integrating a new set of geometric and visual features and focusing on important implementation details enables a noticeable boost in performance and reliability. The proposed approach has been compared with state-of-the-art Deep Learning approaches on a public dataset of outdoor driving scenarios. It reaches an accuracy of 89.2% in scenarios of varying complexity, demonstrating its effectiveness and robustness. The method runs fully on CPU and reaches comparable results with respect to the other methods, operates faster, and requires fewer hardware resources.