 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImproving Generalization of Synthetically Trained Sonar Image Descriptors for Underwater Place Recognition
Aug 02, 2023Autonomous navigation in underwater environments presents challenges due to factors such as light absorption and water turbidity, limiting the effectiveness of optical sensors. Sonar systems are commonly used for perception in underwater operations as they are unaffected by these limitations. Traditional computer vision algorithms are less effective when applied to sonar-generated acoustic images, while convolutional neural networks (CNNs) typically require large amounts of labeled training data that are often unavailable or difficult to acquire. To this end, we propose a novel compact deep sonar descriptor pipeline that can generalize to real scenarios while being trained exclusively on synthetic data. Our architecture is based on a ResNet18 back-end and a properly parameterized random Gaussian projection layer, whereas input sonar data is enhanced with standard ad-hoc normalization/prefiltering techniques. A customized synthetic data generation procedure is also presented. The proposed method has been evaluated extensively using both synthetic and publicly available real data, demonstrating its effectiveness compared to state-of-the-art methods.
KVN: Keypoints Voting Network with Differentiable RANSAC for Stereo Pose Estimation
Jul 21, 2023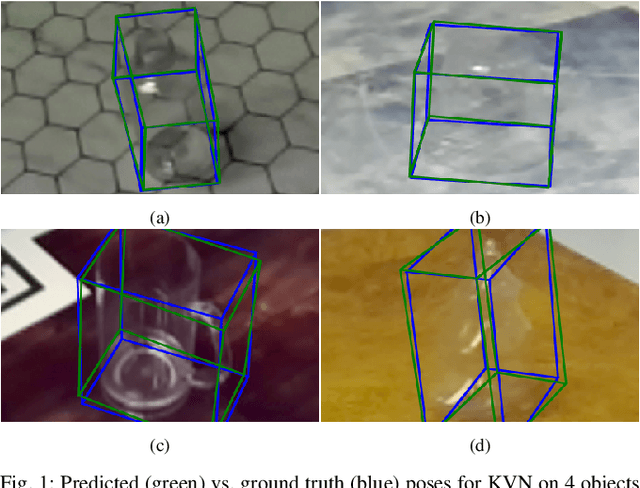

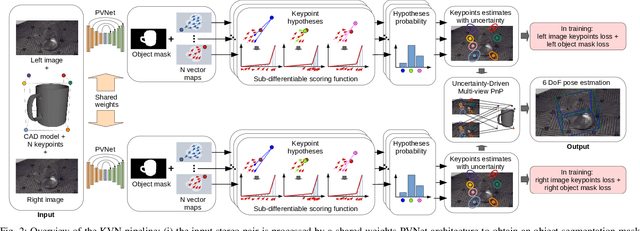

Object pose estimation is a fundamental computer vision task exploited in several robotics and augmented reality applications. Many established approaches rely on predicting 2D-3D keypoint correspondences using RANSAC (Random sample consensus) and estimating the object pose using the PnP (Perspective-n-Point) algorithm. Being RANSAC non-differentiable, correspondences cannot be directly learned in an end-to-end fashion. In this paper, we address the stereo image-based object pose estimation problem by (i) introducing a differentiable RANSAC layer into a well-known monocular pose estimation network; (ii) exploiting an uncertainty-driven multi-view PnP solver which can fuse information from multiple views. We evaluate our approach on a challenging public stereo object pose estimation dataset, yielding state-of-the-art results against other recent approaches. Furthermore, in our ablation study, we show that the differentiable RANSAC layer plays a significant role in the accuracy of the proposed method. We release with this paper the open-source implementation of our method.