 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHorticultural Temporal Fruit Monitoring via 3D Instance Segmentation and Re-Identification using Point Clouds
Paper and Code
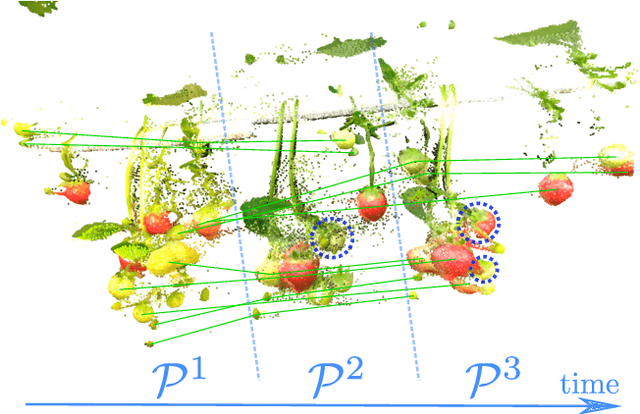
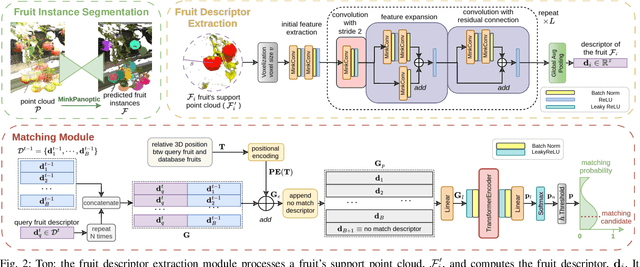
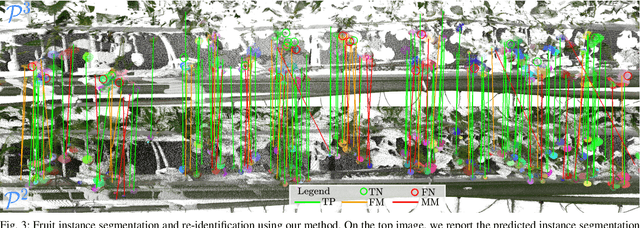
Robotic fruit monitoring is a key step toward automated agricultural production systems. Robots can significantly enhance plant and temporal fruit monitoring by providing precise, high-throughput assessments that overcome the limitations of traditional manual methods. Fruit monitoring is a challenging task due to the significant variation in size, shape, orientation, and occlusion of fruits. Also, fruits may be harvested or newly grown between recording sessions. Most methods are 2D image-based and they lack the 3D structure, depth, and spatial information, which represent key aspects of fruit monitoring. 3D colored point clouds, instead, can offer this information but they introduce challenges such as their sparsity and irregularity. In this paper, we present a novel approach for temporal fruit monitoring that addresses point clouds collected in a greenhouse over time. Our method segments fruits using a learning-based instance segmentation approach directly on the point cloud. Each segmented fruit is processed by a 3D sparse convolutional neural network to extract descriptors, which are used in an attention-based matching network to associate fruits with their instances from previous data collections. Experimental results on a real dataset of strawberries demonstrate that our approach outperforms other methods for fruits re-identification over time, allowing for precise temporal fruit monitoring in real and complex scenarios.