 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCrop mapping from image time series: deep learning with multi-scale label hierarchies
Feb 17, 2021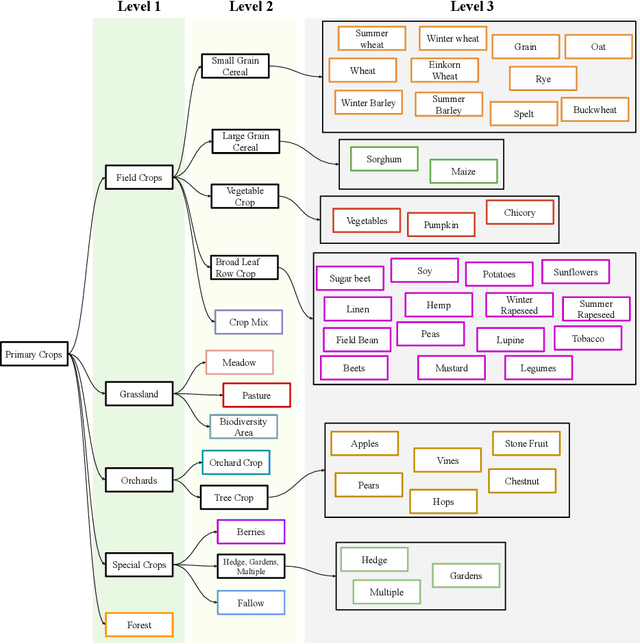
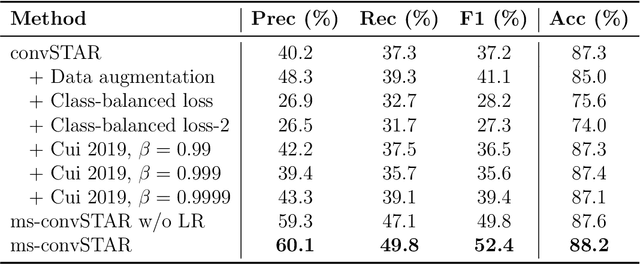

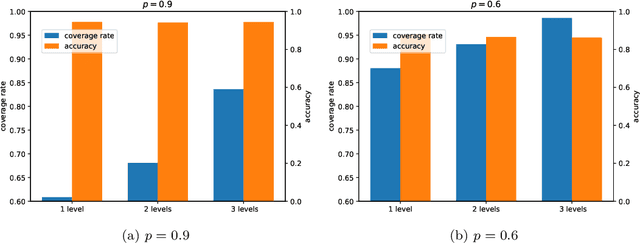
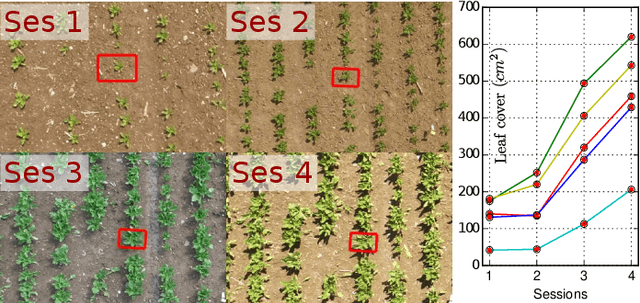
The aim of this paper is to map agricultural crops by classifying satellite image time series. Domain experts in agriculture work with crop type labels that are organised in a hierarchical tree structure, where coarse classes (like orchards) are subdivided into finer ones (like apples, pears, vines, etc.). We develop a crop classification method that exploits this expert knowledge and significantly improves the mapping of rare crop types. The three-level label hierarchy is encoded in a convolutional, recurrent neural network (convRNN), such that for each pixel the model predicts three labels at different level of granularity. This end-to-end trainable, hierarchical network architecture allows the model to learn joint feature representations of rare classes (e.g., apples, pears) at a coarser level (e.g., orchard), thereby boosting classification performance at the fine-grained level. Additionally, labelling at different granularity also makes it possible to adjust the output according to the classification scores; as coarser labels with high confidence are sometimes more useful for agricultural practice than fine-grained but very uncertain labels. We validate the proposed method on a new, large dataset that we make public. ZueriCrop covers an area of 50 km x 48 km in the Swiss cantons of Zurich and Thurgau with a total of 116'000 individual fields spanning 48 crop classes, and 28,000 (multi-temporal) image patches from Sentinel-2. We compare our proposed hierarchical convRNN model with several baselines, including methods designed for imbalanced class distributions. The hierarchical approach performs superior by at least 9.9 percentage points in F1-score.
Building an Aerial-Ground Robotics System for Precision Farming
Nov 08, 2019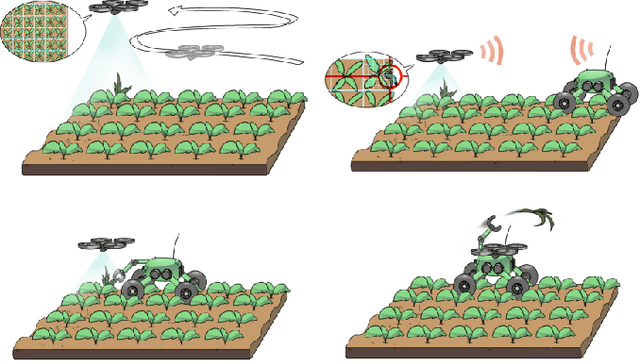
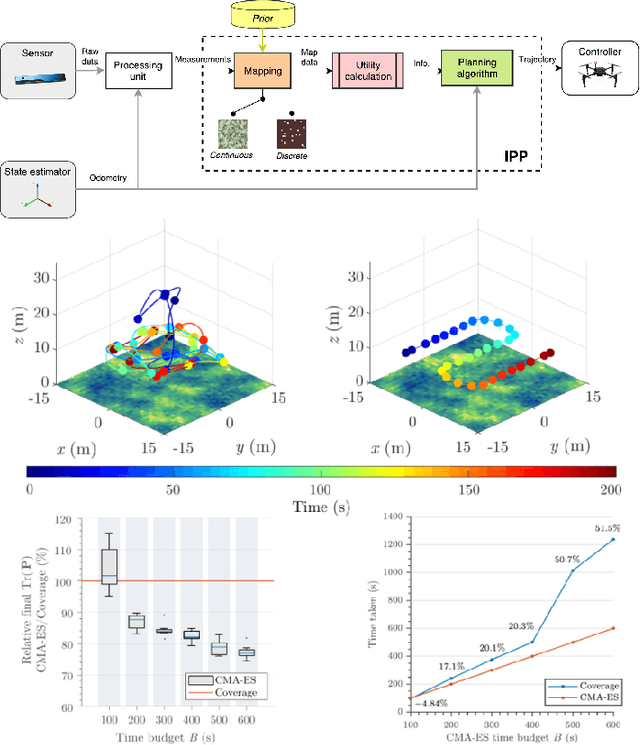
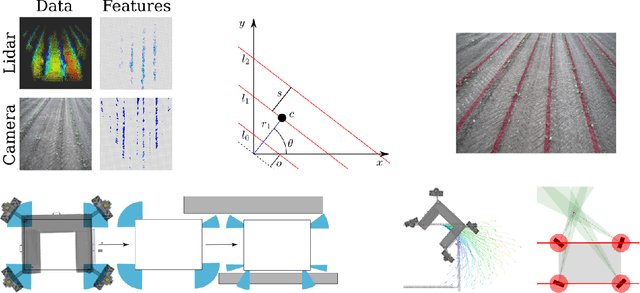
The application of autonomous robots in agriculture is gaining more and more popularity thanks to the high impact it may have on food security, sustainability, resource use efficiency, reduction of chemical treatments, minimization of the human effort and maximization of yield. The Flourish research project faced this challenge by developing an adaptable robotic solution for precision farming that combines the aerial survey capabilities of small autonomous unmanned aerial vehicles (UAVs) with flexible targeted intervention performed by multi-purpose agricultural unmanned ground vehicles (UGVs). This paper presents an exhaustive overview of the scientific and technological advances and outcomes obtained in the Flourish project. We introduce multi-spectral perception algorithms and aerial and ground based systems developed to monitor crop density, weed pressure, crop nitrogen nutrition status, and to accurately classify and locate weeds. We then introduce the navigation and mapping systems to deal with the specificity of the employed robots and of the agricultural environment, highlighting the collaborative modules that enable the UAVs and UGVs to collect and share information in a unified environment model. We finally present the ground intervention hardware, software solutions, and interfaces we implemented and tested in different field conditions and with different crops. We describe here a real use case in which a UAV collaborates with a UGV to monitor the field and to perform selective spraying treatments in a totally autonomous way.
WeedMap: A large-scale semantic weed mapping framework using aerial multispectral imaging and deep neural network for precision farming
Sep 06, 2018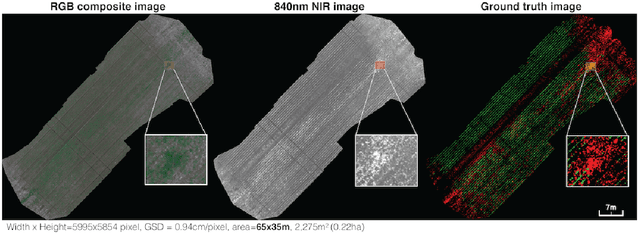
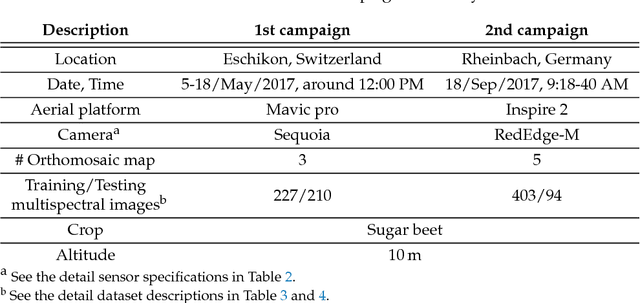
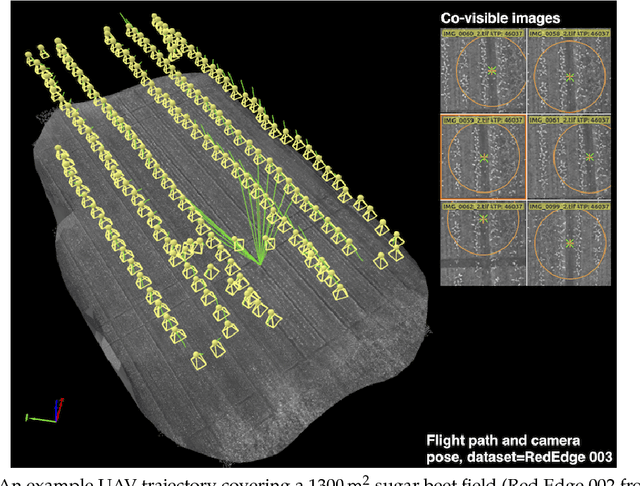
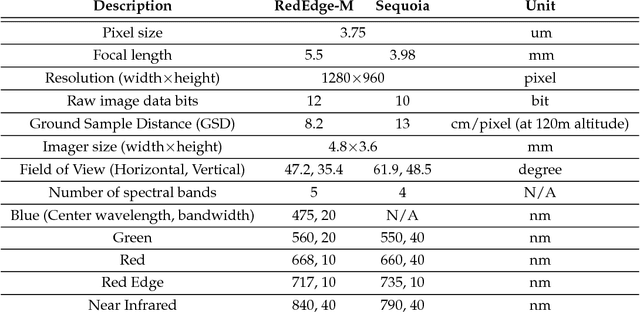
We present a novel weed segmentation and mapping framework that processes multispectral images obtained from an unmanned aerial vehicle (UAV) using a deep neural network (DNN). Most studies on crop/weed semantic segmentation only consider single images for processing and classification. Images taken by UAVs often cover only a few hundred square meters with either color only or color and near-infrared (NIR) channels. Computing a single large and accurate vegetation map (e.g., crop/weed) using a DNN is non-trivial due to difficulties arising from: (1) limited ground sample distances (GSDs) in high-altitude datasets, (2) sacrificed resolution resulting from downsampling high-fidelity images, and (3) multispectral image alignment. To address these issues, we adopt a stand sliding window approach that operates on only small portions of multispectral orthomosaic maps (tiles), which are channel-wise aligned and calibrated radiometrically across the entire map. We define the tile size to be the same as that of the DNN input to avoid resolution loss. Compared to our baseline model (i.e., SegNet with 3 channel RGB inputs) yielding an area under the curve (AUC) of [background=0.607, crop=0.681, weed=0.576], our proposed model with 9 input channels achieves [0.839, 0.863, 0.782]. Additionally, we provide an extensive analysis of 20 trained models, both qualitatively and quantitatively, in order to evaluate the effects of varying input channels and tunable network hyperparameters. Furthermore, we release a large sugar beet/weed aerial dataset with expertly guided annotations for further research in the fields of remote sensing, precision agriculture, and agricultural robotics.
weedNet: Dense Semantic Weed Classification Using Multispectral Images and MAV for Smart Farming
Sep 11, 2017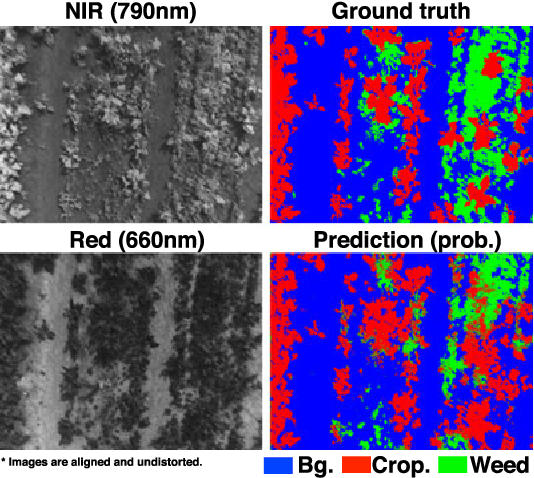
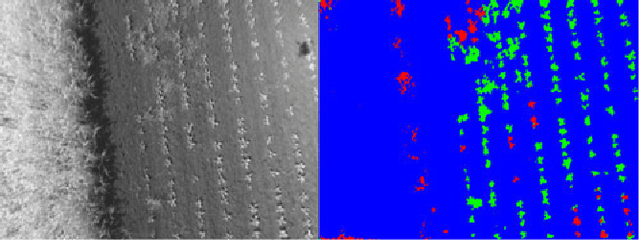
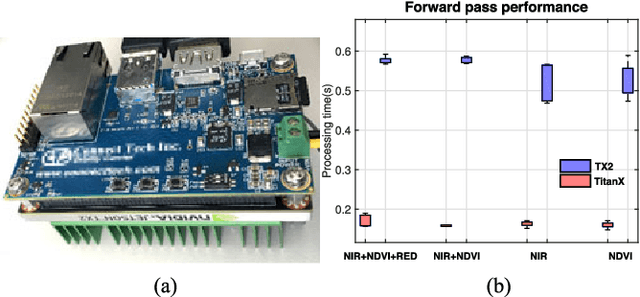
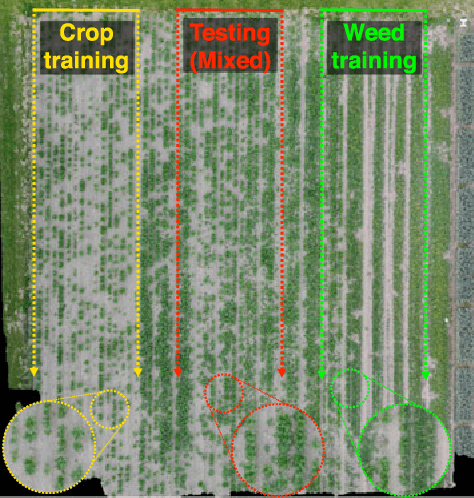
Selective weed treatment is a critical step in autonomous crop management as related to crop health and yield. However, a key challenge is reliable, and accurate weed detection to minimize damage to surrounding plants. In this paper, we present an approach for dense semantic weed classification with multispectral images collected by a micro aerial vehicle (MAV). We use the recently developed encoder-decoder cascaded Convolutional Neural Network (CNN), Segnet, that infers dense semantic classes while allowing any number of input image channels and class balancing with our sugar beet and weed datasets. To obtain training datasets, we established an experimental field with varying herbicide levels resulting in field plots containing only either crop or weed, enabling us to use the Normalized Difference Vegetation Index (NDVI) as a distinguishable feature for automatic ground truth generation. We train 6 models with different numbers of input channels and condition (fine-tune) it to achieve about 0.8 F1-score and 0.78 Area Under the Curve (AUC) classification metrics. For model deployment, an embedded GPU system (Jetson TX2) is tested for MAV integration. Dataset used in this paper is released to support the community and future work.