 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWheat3DGS: In-field 3D Reconstruction, Instance Segmentation and Phenotyping of Wheat Heads with Gaussian Splatting
Apr 09, 2025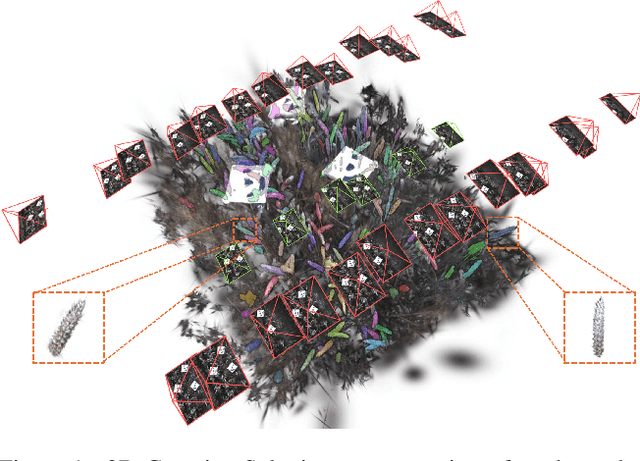
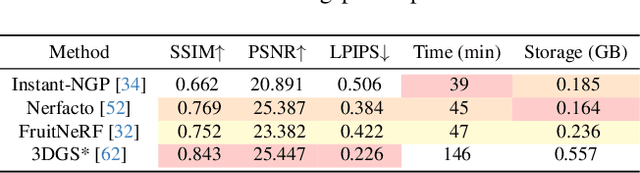
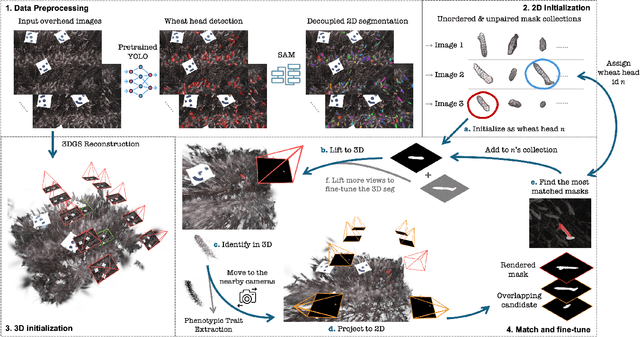

Automated extraction of plant morphological traits is crucial for supporting crop breeding and agricultural management through high-throughput field phenotyping (HTFP). Solutions based on multi-view RGB images are attractive due to their scalability and affordability, enabling volumetric measurements that 2D approaches cannot directly capture. While advanced methods like Neural Radiance Fields (NeRFs) have shown promise, their application has been limited to counting or extracting traits from only a few plants or organs. Furthermore, accurately measuring complex structures like individual wheat heads-essential for studying crop yields-remains particularly challenging due to occlusions and the dense arrangement of crop canopies in field conditions. The recent development of 3D Gaussian Splatting (3DGS) offers a promising alternative for HTFP due to its high-quality reconstructions and explicit point-based representation. In this paper, we present Wheat3DGS, a novel approach that leverages 3DGS and the Segment Anything Model (SAM) for precise 3D instance segmentation and morphological measurement of hundreds of wheat heads automatically, representing the first application of 3DGS to HTFP. We validate the accuracy of wheat head extraction against high-resolution laser scan data, obtaining per-instance mean absolute percentage errors of 15.1%, 18.3%, and 40.2% for length, width, and volume. We provide additional comparisons to NeRF-based approaches and traditional Muti-View Stereo (MVS), demonstrating superior results. Our approach enables rapid, non-destructive measurements of key yield-related traits at scale, with significant implications for accelerating crop breeding and improving our understanding of wheat development.
TC-Driver: Trajectory Conditioned Driving for Robust Autonomous Racing -- A Reinforcement Learning Approach
May 19, 2022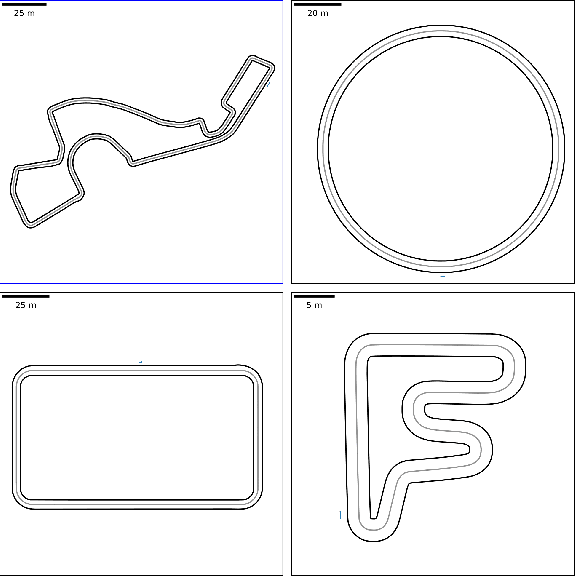
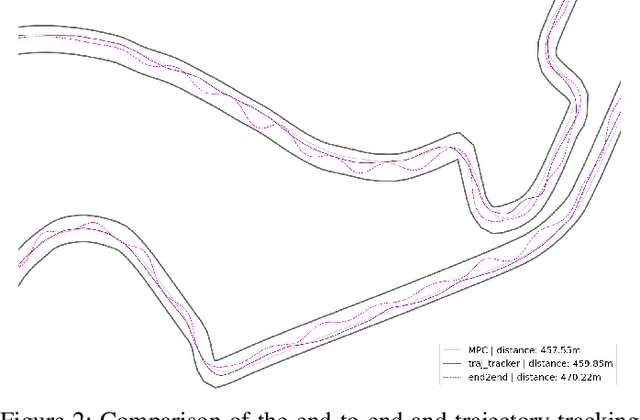
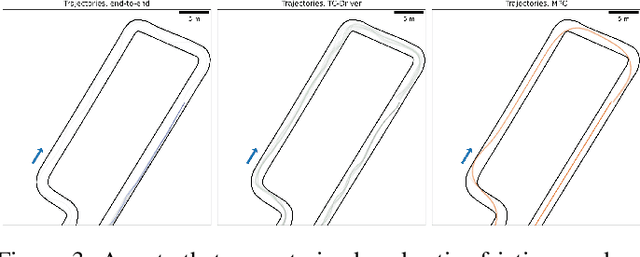
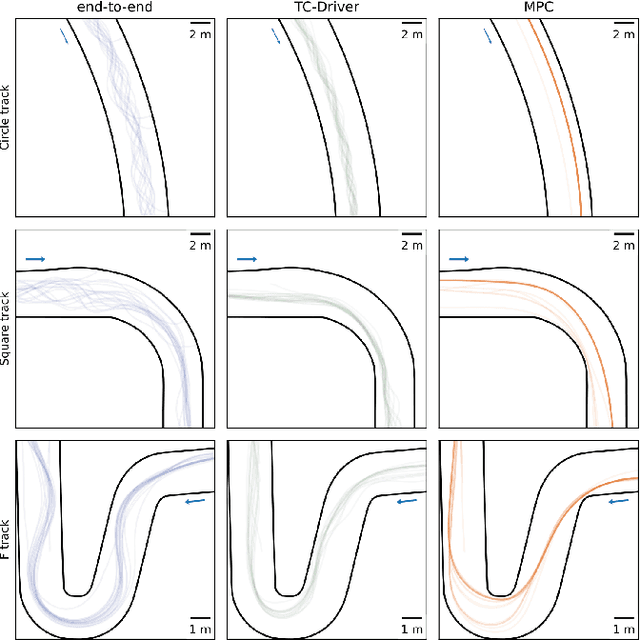
Autonomous racing is becoming popular for academic and industry researchers as a test for general autonomous driving by pushing perception, planning, and control algorithms to their limits. While traditional control methods such as MPC are capable of generating an optimal control sequence at the edge of the vehicles physical controllability, these methods are sensitive to the accuracy of the modeling parameters. This paper presents TC-Driver, a RL approach for robust control in autonomous racing. In particular, the TC-Driver agent is conditioned by a trajectory generated by any arbitrary traditional high-level planner. The proposed TC-Driver addresses the tire parameter modeling inaccuracies by exploiting the heuristic nature of RL while leveraging the reliability of traditional planning methods in a hierarchical control structure. We train the agent under varying tire conditions, allowing it to generalize to different model parameters, aiming to increase the racing capabilities of the system in practice. The proposed RL method outperforms a non-learning-based MPC with a 2.7 lower crash ratio in a model mismatch setting, underlining robustness to parameter discrepancies. In addition, the average RL inference duration is 0.25 ms compared to the average MPC solving time of 11.5 ms, yielding a nearly 40-fold speedup, allowing for complex control deployment in computationally constrained devices. Lastly, we show that the frequently utilized end-to-end RL architecture, as a control policy directly learned from sensory input, is not well suited to model mismatch robustness nor track generalization. Our realistic simulations show that TC-Driver achieves a 6.7 and 3-fold lower crash ratio under model mismatch and track generalization settings, while simultaneously achieving lower lap times than an end-to-end approach, demonstrating the viability of TC-driver to robust autonomous racing.