 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLogiDebrief: A Signal-Temporal Logic based Automated Debriefing Approach with Large Language Models Integration
May 06, 2025Emergency response services are critical to public safety, with 9-1-1 call-takers playing a key role in ensuring timely and effective emergency operations. To ensure call-taking performance consistency, quality assurance is implemented to evaluate and refine call-takers' skillsets. However, traditional human-led evaluations struggle with high call volumes, leading to low coverage and delayed assessments. We introduce LogiDebrief, an AI-driven framework that automates traditional 9-1-1 call debriefing by integrating Signal-Temporal Logic (STL) with Large Language Models (LLMs) for fully-covered rigorous performance evaluation. LogiDebrief formalizes call-taking requirements as logical specifications, enabling systematic assessment of 9-1-1 calls against procedural guidelines. It employs a three-step verification process: (1) contextual understanding to identify responder types, incident classifications, and critical conditions; (2) STL-based runtime checking with LLM integration to ensure compliance; and (3) automated aggregation of results into quality assurance reports. Beyond its technical contributions, LogiDebrief has demonstrated real-world impact. Successfully deployed at Metro Nashville Department of Emergency Communications, it has assisted in debriefing 1,701 real-world calls, saving 311.85 hours of active engagement. Empirical evaluation with real-world data confirms its accuracy, while a case study and extensive user study highlight its effectiveness in enhancing call-taking performance.
Combining LLMs with Logic-Based Framework to Explain MCTS
May 01, 2025
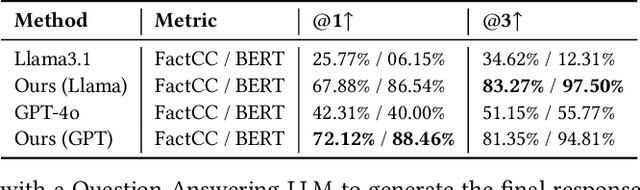
In response to the lack of trust in Artificial Intelligence (AI) for sequential planning, we design a Computational Tree Logic-guided large language model (LLM)-based natural language explanation framework designed for the Monte Carlo Tree Search (MCTS) algorithm. MCTS is often considered challenging to interpret due to the complexity of its search trees, but our framework is flexible enough to handle a wide range of free-form post-hoc queries and knowledge-based inquiries centered around MCTS and the Markov Decision Process (MDP) of the application domain. By transforming user queries into logic and variable statements, our framework ensures that the evidence obtained from the search tree remains factually consistent with the underlying environmental dynamics and any constraints in the actual stochastic control process. We evaluate the framework rigorously through quantitative assessments, where it demonstrates strong performance in terms of accuracy and factual consistency.
Formal Logic-guided Robust Federated Learning against Poisoning Attacks
Nov 05, 2024



Federated Learning (FL) offers a promising solution to the privacy concerns associated with centralized Machine Learning (ML) by enabling decentralized, collaborative learning. However, FL is vulnerable to various security threats, including poisoning attacks, where adversarial clients manipulate the training data or model updates to degrade overall model performance. Recognizing this threat, researchers have focused on developing defense mechanisms to counteract poisoning attacks in FL systems. However, existing robust FL methods predominantly focus on computer vision tasks, leaving a gap in addressing the unique challenges of FL with time series data. In this paper, we present FLORAL, a defense mechanism designed to mitigate poisoning attacks in federated learning for time-series tasks, even in scenarios with heterogeneous client data and a large number of adversarial participants. Unlike traditional model-centric defenses, FLORAL leverages logical reasoning to evaluate client trustworthiness by aligning their predictions with global time-series patterns, rather than relying solely on the similarity of client updates. Our approach extracts logical reasoning properties from clients, then hierarchically infers global properties, and uses these to verify client updates. Through formal logic verification, we assess the robustness of each client contribution, identifying deviations indicative of adversarial behavior. Experimental results on two datasets demonstrate the superior performance of our approach compared to existing baseline methods, highlighting its potential to enhance the robustness of FL to time series applications. Notably, FLORAL reduced the prediction error by 93.27\% in the best-case scenario compared to the second-best baseline. Our code is available at \url{https://anonymous.4open.science/r/FLORAL-Robust-FTS}.
Enabling MCTS Explainability for Sequential Planning Through Computation Tree Logic
Jul 15, 2024



Monte Carlo tree search (MCTS) is one of the most capable online search algorithms for sequential planning tasks, with significant applications in areas such as resource allocation and transit planning. Despite its strong performance in real-world deployment, the inherent complexity of MCTS makes it challenging to understand for users without technical background. This paper considers the use of MCTS in transportation routing services, where the algorithm is integrated to develop optimized route plans. These plans are required to meet a range of constraints and requirements simultaneously, further complicating the task of explaining the algorithm's operation in real-world contexts. To address this critical research gap, we introduce a novel computation tree logic-based explainer for MCTS. Our framework begins by taking user-defined requirements and translating them into rigorous logic specifications through the use of language templates. Then, our explainer incorporates a logic verification and quantitative evaluation module that validates the states and actions traversed by the MCTS algorithm. The outcomes of this analysis are then rendered into human-readable descriptive text using a second set of language templates. The user satisfaction of our approach was assessed through a survey with 82 participants. The results indicated that our explanatory approach significantly outperforms other baselines in user preference.
Formal Logic Enabled Personalized Federated Learning Through Property Inference
Jan 24, 2024



Recent advancements in federated learning (FL) have greatly facilitated the development of decentralized collaborative applications, particularly in the domain of Artificial Intelligence of Things (AIoT). However, a critical aspect missing from the current research landscape is the ability to enable data-driven client models with symbolic reasoning capabilities. Specifically, the inherent heterogeneity of participating client devices poses a significant challenge, as each client exhibits unique logic reasoning properties. Failing to consider these device-specific specifications can result in critical properties being missed in the client predictions, leading to suboptimal performance. In this work, we propose a new training paradigm that leverages temporal logic reasoning to address this issue. Our approach involves enhancing the training process by incorporating mechanically generated logic expressions for each FL client. Additionally, we introduce the concept of aggregation clusters and develop a partitioning algorithm to effectively group clients based on the alignment of their temporal reasoning properties. We evaluate the proposed method on two tasks: a real-world traffic volume prediction task consisting of sensory data from fifteen states and a smart city multi-task prediction utilizing synthetic data. The evaluation results exhibit clear improvements, with performance accuracy improved by up to 54% across all sequential prediction models.
EduSAT: A Pedagogical Tool for Theory and Applications of Boolean Satisfiability
Aug 15, 2023



Boolean Satisfiability (SAT) and Satisfiability Modulo Theories (SMT) are widely used in automated verification, but there is a lack of interactive tools designed for educational purposes in this field. To address this gap, we present EduSAT, a pedagogical tool specifically developed to support learning and understanding of SAT and SMT solving. EduSAT offers implementations of key algorithms such as the Davis-Putnam-Logemann-Loveland (DPLL) algorithm and the Reduced Order Binary Decision Diagram (ROBDD) for SAT solving. Additionally, EduSAT provides solver abstractions for five NP-complete problems beyond SAT and SMT. Users can benefit from EduSAT by experimenting, analyzing, and validating their understanding of SAT and SMT solving techniques. Our tool is accompanied by comprehensive documentation and tutorials, extensive testing, and practical features such as a natural language interface and SAT and SMT formula generators, which also serve as a valuable opportunity for learners to deepen their understanding. Our evaluation of EduSAT demonstrates its high accuracy, achieving 100% correctness across all the implemented SAT and SMT solvers. We release EduSAT as a python package in .whl file, and the source can be identified at https://github.com/zhaoy37/SAT_Solver.
Multi-Agent Reinforcement Learning Guided by Signal Temporal Logic Specifications
Jun 11, 2023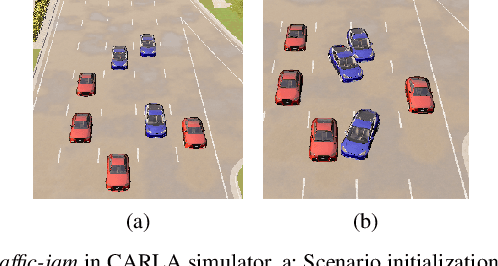
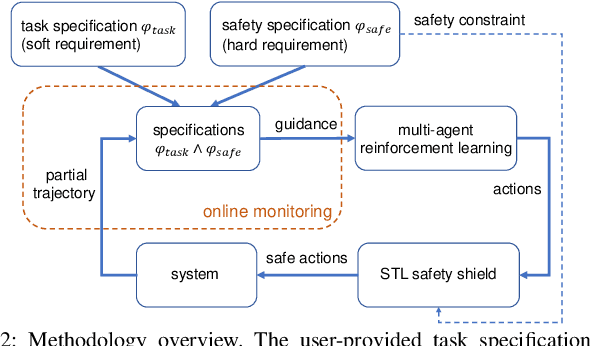
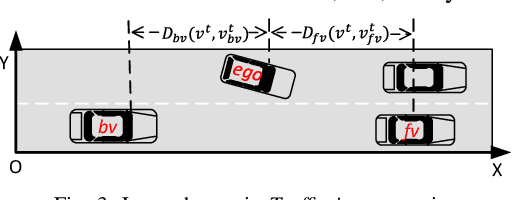
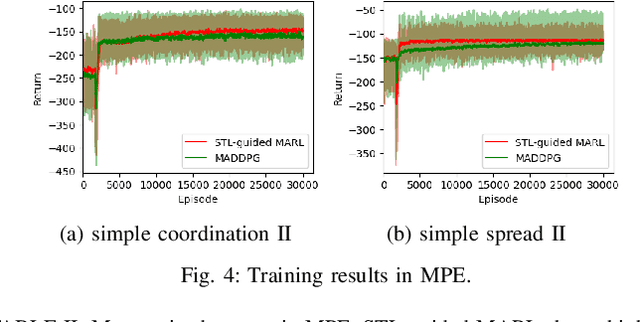
There has been growing interest in deep reinforcement learning (DRL) algorithm design, and reward design is one key component of DRL. Among the various techniques, formal methods integrated with DRL have garnered considerable attention due to their expressiveness and ability to define the requirements for the states and actions of the agent. However, the literature of Signal Temporal Logic (STL) in guiding multi-agent reinforcement learning (MARL) reward design remains limited. In this paper, we propose a novel STL-guided multi-agent reinforcement learning algorithm. The STL specifications are designed to include both task specifications according to the objective of each agent and safety specifications, and the robustness values of the STL specifications are leveraged to generate rewards. We validate the advantages of our method through empirical studies. The experimental results demonstrate significant performance improvements compared to MARL without STL guidance, along with a remarkable increase in the overall safety rate of the multi-agent systems.
Fairguard: Harness Logic-based Fairness Rules in Smart Cities
Feb 23, 2023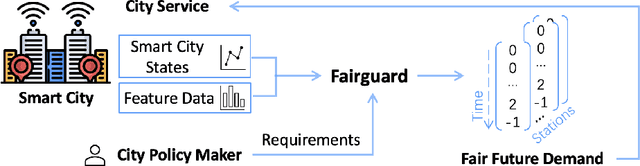
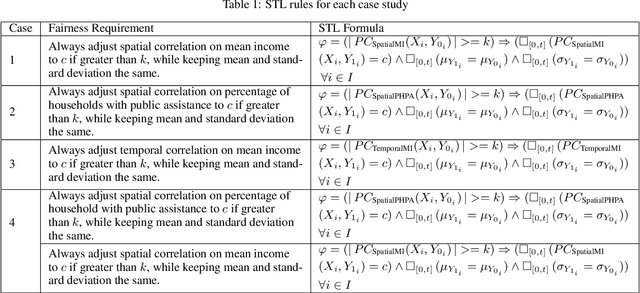
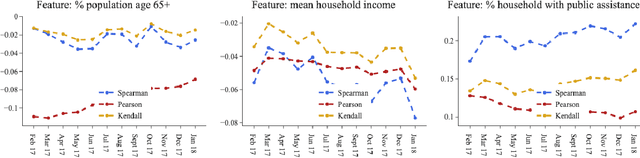
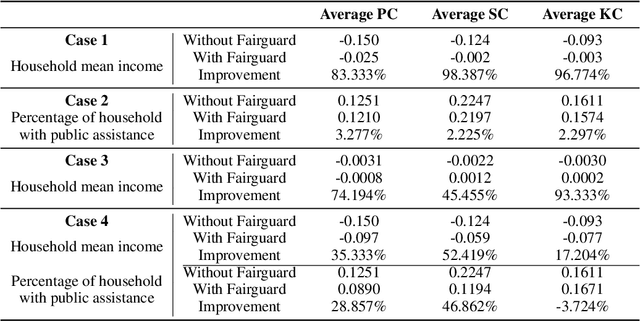
Smart cities operate on computational predictive frameworks that collect, aggregate, and utilize data from large-scale sensor networks. However, these frameworks are prone to multiple sources of data and algorithmic bias, which often lead to unfair prediction results. In this work, we first demonstrate that bias persists at a micro-level both temporally and spatially by studying real city data from Chattanooga, TN. To alleviate the issue of such bias, we introduce Fairguard, a micro-level temporal logic-based approach for fair smart city policy adjustment and generation in complex temporal-spatial domains. The Fairguard framework consists of two phases: first, we develop a static generator that is able to reduce data bias based on temporal logic conditions by minimizing correlations between selected attributes. Then, to ensure fairness in predictive algorithms, we design a dynamic component to regulate prediction results and generate future fair predictions by harnessing logic rules. Evaluations show that logic-enabled static Fairguard can effectively reduce the biased correlations while dynamic Fairguard can guarantee fairness on protected groups at run-time with minimal impact on overall performance.
V2X-Sim: A Virtual Collaborative Perception Dataset for Autonomous Driving
Feb 17, 2022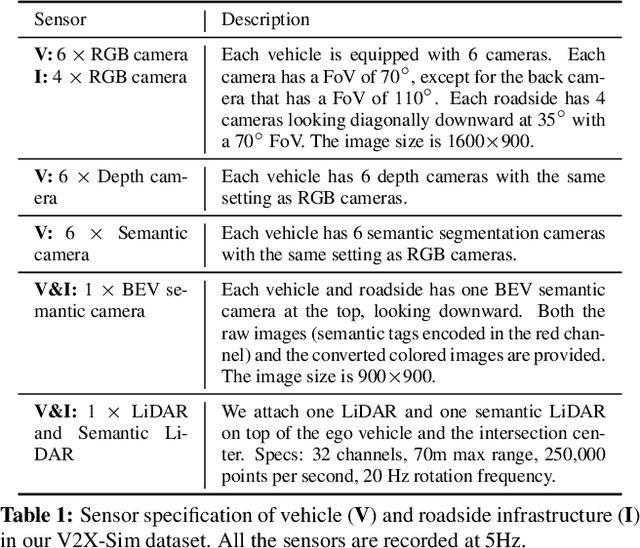
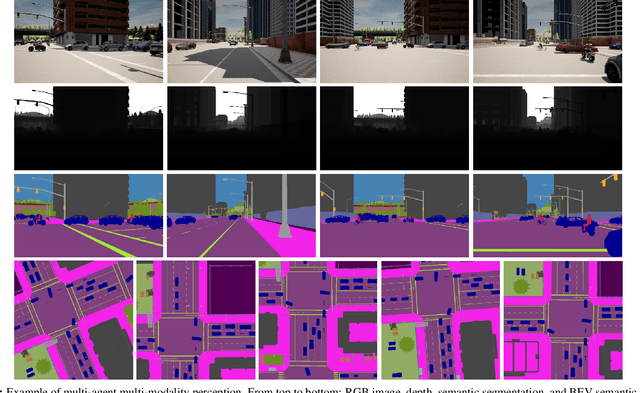
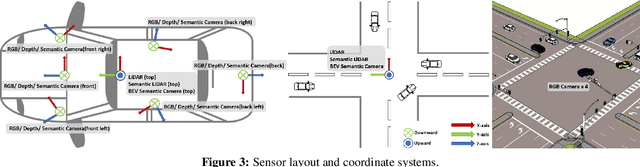
Vehicle-to-everything (V2X), which denotes the collaboration between a vehicle and any entity in its surrounding, can fundamentally improve the perception in self-driving systems. As the individual perception rapidly advances, collaborative perception has made little progress due to the shortage of public V2X datasets. In this work, we present the V2X-Sim dataset, the first public large-scale collaborative perception dataset in autonomous driving. V2X-Sim provides: 1) well-synchronized recordings from roadside infrastructure and multiple vehicles at the intersection to enable collaborative perception, 2) multi-modality sensor streams to facilitate multi-modality perception, 3) diverse well-annotated ground truth to support various downstream tasks including detection, tracking, and segmentation. We seek to inspire research on multi-agent multi-modality multi-task perception, and our virtual dataset is promising to promote the development of collaborative perception before realistic datasets become widely available.