 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFormal Verification and Control with Conformal Prediction
Aug 31, 2024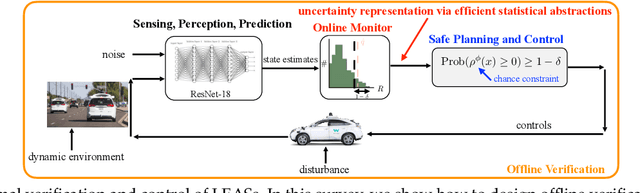
In this survey, we design formal verification and control algorithms for autonomous systems with practical safety guarantees using conformal prediction (CP), a statistical tool for uncertainty quantification. We focus on learning-enabled autonomous systems (LEASs) in which the complexity of learning-enabled components (LECs) is a major bottleneck that hampers the use of existing model-based verification and design techniques. Instead, we advocate for the use of CP, and we will demonstrate its use in formal verification, systems and control theory, and robotics. We argue that CP is specifically useful due to its simplicity (easy to understand, use, and modify), generality (requires no assumptions on learned models and data distributions, i.e., is distribution-free), and efficiency (real-time capable and accurate). We pursue the following goals with this survey. First, we provide an accessible introduction to CP for non-experts who are interested in using CP to solve problems in autonomy. Second, we show how to use CP for the verification of LECs, e.g., for verifying input-output properties of neural networks. Third and fourth, we review recent articles that use CP for safe control design as well as offline and online verification of LEASs. We summarize their ideas in a unifying framework that can deal with the complexity of LEASs in a computationally efficient manner. In our exposition, we consider simple system specifications, e.g., robot navigation tasks, as well as complex specifications formulated in temporal logic formalisms. Throughout our survey, we compare to other statistical techniques (e.g., scenario optimization, PAC-Bayes theory, etc.) and how these techniques have been used in verification and control. Lastly, we point the reader to open problems and future research directions.
Conformal Predictive Programming for Chance Constrained Optimization
Feb 12, 2024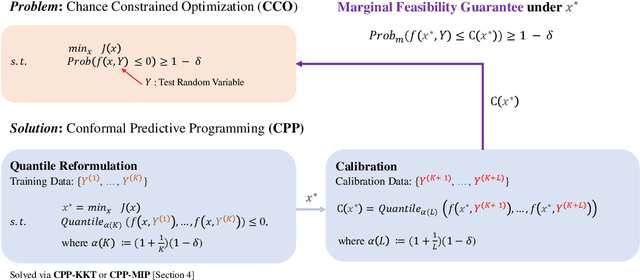


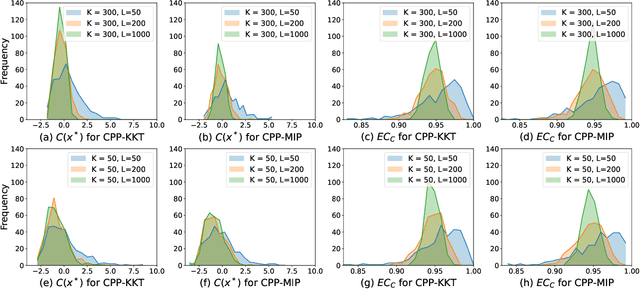
Motivated by the advances in conformal prediction (CP), we propose conformal predictive programming (CPP), an approach to solve chance constrained optimization (CCO) problems, i.e., optimization problems with nonlinear constraint functions affected by arbitrary random parameters. CPP utilizes samples from these random parameters along with the quantile lemma -- which is central to CP -- to transform the CCO problem into a deterministic optimization problem. We then present two tractable reformulations of CPP by: (1) writing the quantile as a linear program along with its KKT conditions (CPP-KKT), and (2) using mixed integer programming (CPP-MIP). CPP comes with marginal probabilistic feasibility guarantees for the CCO problem that are conceptually different from existing approaches, e.g., the sample approximation and the scenario approach. While we explore algorithmic similarities with the sample approximation approach, we emphasize that the strength of CPP is that it can easily be extended to incorporate different variants of CP. To illustrate this, we present robust conformal predictive programming to deal with distribution shifts in the uncertain parameters of the CCO problem.
Robust Conformal Prediction for STL Runtime Verification under Distribution Shift
Nov 16, 2023



Cyber-physical systems (CPS) designed in simulators behave differently in the real-world. Once they are deployed in the real-world, we would hence like to predict system failures during runtime. We propose robust predictive runtime verification (RPRV) algorithms under signal temporal logic (STL) tasks for general stochastic CPS. The RPRV problem faces several challenges: (1) there may not be sufficient data of the behavior of the deployed CPS, (2) predictive models are based on a distribution over system trajectories encountered during the design phase, i.e., there may be a distribution shift during deployment. To address these challenges, we assume to know an upper bound on the statistical distance (in terms of an f-divergence) between the distributions at deployment and design time, and we utilize techniques based on robust conformal prediction. Motivated by our results in [1], we construct an accurate and an interpretable RPRV algorithm. We use a trajectory prediction model to estimate the system behavior at runtime and robust conformal prediction to obtain probabilistic guarantees by accounting for distribution shifts. We precisely quantify the relationship between calibration data, desired confidence, and permissible distribution shift. To the best of our knowledge, these are the first statistically valid algorithms under distribution shift in this setting. We empirically validate our algorithms on a Franka manipulator within the NVIDIA Isaac sim environment.
EduSAT: A Pedagogical Tool for Theory and Applications of Boolean Satisfiability
Aug 15, 2023



Boolean Satisfiability (SAT) and Satisfiability Modulo Theories (SMT) are widely used in automated verification, but there is a lack of interactive tools designed for educational purposes in this field. To address this gap, we present EduSAT, a pedagogical tool specifically developed to support learning and understanding of SAT and SMT solving. EduSAT offers implementations of key algorithms such as the Davis-Putnam-Logemann-Loveland (DPLL) algorithm and the Reduced Order Binary Decision Diagram (ROBDD) for SAT solving. Additionally, EduSAT provides solver abstractions for five NP-complete problems beyond SAT and SMT. Users can benefit from EduSAT by experimenting, analyzing, and validating their understanding of SAT and SMT solving techniques. Our tool is accompanied by comprehensive documentation and tutorials, extensive testing, and practical features such as a natural language interface and SAT and SMT formula generators, which also serve as a valuable opportunity for learners to deepen their understanding. Our evaluation of EduSAT demonstrates its high accuracy, achieving 100% correctness across all the implemented SAT and SMT solvers. We release EduSAT as a python package in .whl file, and the source can be identified at https://github.com/zhaoy37/SAT_Solver.
Fairguard: Harness Logic-based Fairness Rules in Smart Cities
Feb 23, 2023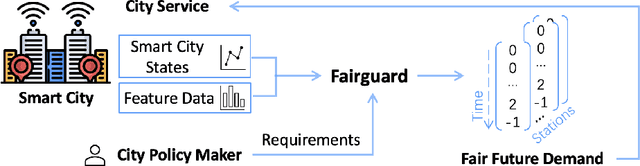
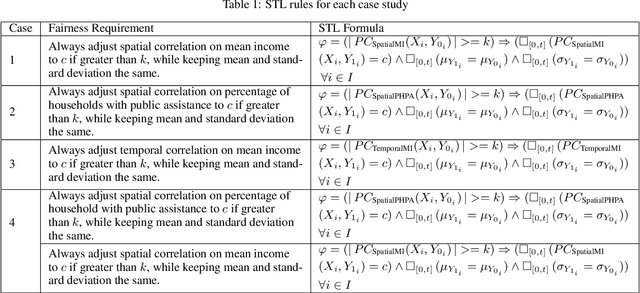
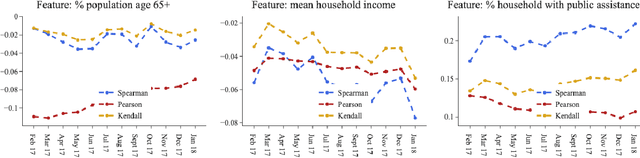
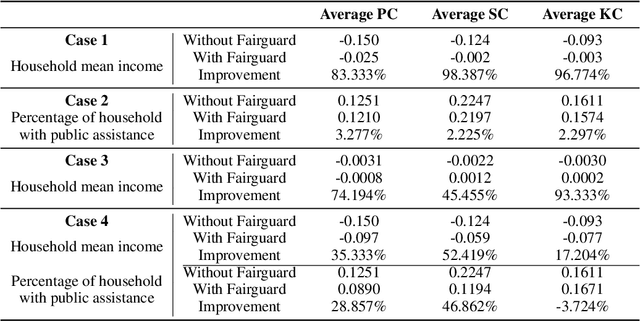
Smart cities operate on computational predictive frameworks that collect, aggregate, and utilize data from large-scale sensor networks. However, these frameworks are prone to multiple sources of data and algorithmic bias, which often lead to unfair prediction results. In this work, we first demonstrate that bias persists at a micro-level both temporally and spatially by studying real city data from Chattanooga, TN. To alleviate the issue of such bias, we introduce Fairguard, a micro-level temporal logic-based approach for fair smart city policy adjustment and generation in complex temporal-spatial domains. The Fairguard framework consists of two phases: first, we develop a static generator that is able to reduce data bias based on temporal logic conditions by minimizing correlations between selected attributes. Then, to ensure fairness in predictive algorithms, we design a dynamic component to regulate prediction results and generate future fair predictions by harnessing logic rules. Evaluations show that logic-enabled static Fairguard can effectively reduce the biased correlations while dynamic Fairguard can guarantee fairness on protected groups at run-time with minimal impact on overall performance.