 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModeling Spectral Energy Shifts in Spatio-Temporal Graph Anomaly Detection
May 29, 2026Graph anomaly detection methods aim to distinguish anomalous nodes. While prior methods characterize anomalies through increased variation in the spectral energy distributions, they overlook those that result in decreased variation, i.e., camouflaged anomalies that appear normal. We show that this type of anomaly persists across multiple datasets and remains undetectable by existing spectral approaches. To address this limitation, we propose a node-level spectral energy formulation that is fully compatible with message passing and enables the detection of camouflaged anomalies. Building on this formulation, we introduce an energy-aware graph learning framework that models spectral shifts through energy-driven message passing in both static and time-series graphs. Besides, our unified architecture extends to temporal settings without introducing specialized sequence modules, enabling efficient learning under long sliding windows. Extensive experiments on large-scale benchmarks demonstrate the effectiveness and scalability of our approach.
Verification and Forward Invariance of Control Barrier Functions for Differential-Algebraic Systems
Mar 13, 2026Differential-algebraic equations (DAEs) arise in power networks, chemical processes, and multibody systems, where algebraic constraints encode physical conservation laws. The safety of such systems is critical, yet safe control is challenging because algebraic constraints restrict allowable state trajectories. Control barrier functions (CBFs) provide computationally efficient safety filters for ordinary differential equation (ODE) systems. However, existing CBF methods are not directly applicable to DAEs due to potential conflicts between the CBF condition and the constraint manifold. This paper introduces DAE-aware CBFs that incorporate the differential-algebraic structure through projected vector fields. We derive conditions that ensure forward invariance of safe sets while preserving algebraic constraints and extend the framework to higher-index DAEs. A systematic verification framework is developed, establishing necessary and sufficient conditions for geometric correctness and feasibility of DAE-aware CBFs. For polynomial systems, sum-of-squares certificates are provided, while for nonpolynomial and neural network candidates, satisfiability modulo theories are used for falsification. The approach is validated on wind turbine and flexible-link manipulator systems.
PACE: A Personalized Adaptive Curriculum Engine for 9-1-1 Call-taker Training
Mar 05, 20269-1-1 call-taking training requires mastery of over a thousand interdependent skills, covering diverse incident types and protocol-specific nuances. A nationwide labor shortage is already straining training capacity, but effective instruction still demands that trainers tailor objectives to each trainee's evolving competencies. This personalization burden is one that current practice cannot scale. Partnering with Metro Nashville Department of Emergency Communications (MNDEC), we propose PACE (Personalized Adaptive Curriculum Engine), a co-pilot system that augments trainer decision-making by (1) maintaining probabilistic beliefs over trainee skill states, (2) modeling individual learning and forgetting dynamics, and (3) recommending training scenarios that balance acquisition of new competencies with retention of existing ones. PACE propagates evidence over a structured skill graph to accelerate diagnostic coverage and applies contextual bandits to select scenarios that target gaps the trainee is prepared to address. Empirical results show that PACE achieves 19.50% faster time-to-competence and 10.95% higher terminal mastery compared to state-of-the-art frameworks. Co-pilot studies with practicing training officers further demonstrate a 95.45% alignment rate between PACE's and experts' pedagogical judgments on real-world cases. Under estimation, PACE cuts turnaround time to merely 34 seconds from 11.58 minutes, up to 95.08% reduction.
BEAGLE: Behavior-Enforced Agent for Grounded Learner Emulation
Feb 06, 2026Simulating student learning behaviors in open-ended problem-solving environments holds potential for education research, from training adaptive tutoring systems to stress-testing pedagogical interventions. However, collecting authentic data is challenging due to privacy concerns and the high cost of longitudinal studies. While Large Language Models (LLMs) offer a promising path to student simulation, they suffer from competency bias, optimizing for efficient correctness rather than the erratic, iterative struggle characteristic of novice learners. We present BEAGLE, a neuro-symbolic framework that addresses this bias by incorporating Self-Regulated Learning (SRL) theory into a novel architecture. BEAGLE integrates three key technical innovations: (1) a semi-Markov model that governs the timing and transitions of cognitive behaviors and metacognitive behaviors; (2) Bayesian Knowledge Tracing with explicit flaw injection to enforce realistic knowledge gaps and "unknown unknowns"; and (3) a decoupled agent design that separates high-level strategy use from code generation actions to prevent the model from silently correcting its own intentional errors. In evaluations on Python programming tasks, BEAGLE significantly outperforms state-of-the-art baselines in reproducing authentic trajectories. In a human Turing test, users were unable to distinguish synthetic traces from real student data, achieving an accuracy indistinguishable from random guessing (52.8%).
Learning with Preserving for Continual Multitask Learning
Nov 11, 2025Artificial intelligence systems in critical fields like autonomous driving and medical imaging analysis often continually learn new tasks using a shared stream of input data. For instance, after learning to detect traffic signs, a model may later need to learn to classify traffic lights or different types of vehicles using the same camera feed. This scenario introduces a challenging setting we term Continual Multitask Learning (CMTL), where a model sequentially learns new tasks on an underlying data distribution without forgetting previously learned abilities. Existing continual learning methods often fail in this setting because they learn fragmented, task-specific features that interfere with one another. To address this, we introduce Learning with Preserving (LwP), a novel framework that shifts the focus from preserving task outputs to maintaining the geometric structure of the shared representation space. The core of LwP is a Dynamically Weighted Distance Preservation (DWDP) loss that prevents representation drift by regularizing the pairwise distances between latent data representations. This mechanism of preserving the underlying geometric structure allows the model to retain implicit knowledge and support diverse tasks without requiring a replay buffer, making it suitable for privacy-conscious applications. Extensive evaluations on time-series and image benchmarks show that LwP not only mitigates catastrophic forgetting but also consistently outperforms state-of-the-art baselines in CMTL tasks. Notably, our method shows superior robustness to distribution shifts and is the only approach to surpass the strong single-task learning baseline, underscoring its effectiveness for real-world dynamic environments.
LogiDebrief: A Signal-Temporal Logic based Automated Debriefing Approach with Large Language Models Integration
May 06, 2025Emergency response services are critical to public safety, with 9-1-1 call-takers playing a key role in ensuring timely and effective emergency operations. To ensure call-taking performance consistency, quality assurance is implemented to evaluate and refine call-takers' skillsets. However, traditional human-led evaluations struggle with high call volumes, leading to low coverage and delayed assessments. We introduce LogiDebrief, an AI-driven framework that automates traditional 9-1-1 call debriefing by integrating Signal-Temporal Logic (STL) with Large Language Models (LLMs) for fully-covered rigorous performance evaluation. LogiDebrief formalizes call-taking requirements as logical specifications, enabling systematic assessment of 9-1-1 calls against procedural guidelines. It employs a three-step verification process: (1) contextual understanding to identify responder types, incident classifications, and critical conditions; (2) STL-based runtime checking with LLM integration to ensure compliance; and (3) automated aggregation of results into quality assurance reports. Beyond its technical contributions, LogiDebrief has demonstrated real-world impact. Successfully deployed at Metro Nashville Department of Emergency Communications, it has assisted in debriefing 1,701 real-world calls, saving 311.85 hours of active engagement. Empirical evaluation with real-world data confirms its accuracy, while a case study and extensive user study highlight its effectiveness in enhancing call-taking performance.
Combining LLMs with Logic-Based Framework to Explain MCTS
May 01, 2025
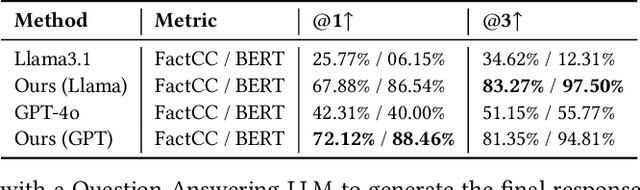
In response to the lack of trust in Artificial Intelligence (AI) for sequential planning, we design a Computational Tree Logic-guided large language model (LLM)-based natural language explanation framework designed for the Monte Carlo Tree Search (MCTS) algorithm. MCTS is often considered challenging to interpret due to the complexity of its search trees, but our framework is flexible enough to handle a wide range of free-form post-hoc queries and knowledge-based inquiries centered around MCTS and the Markov Decision Process (MDP) of the application domain. By transforming user queries into logic and variable statements, our framework ensures that the evidence obtained from the search tree remains factually consistent with the underlying environmental dynamics and any constraints in the actual stochastic control process. We evaluate the framework rigorously through quantitative assessments, where it demonstrates strong performance in terms of accuracy and factual consistency.
Sim911: Towards Effective and Equitable 9-1-1 Dispatcher Training with an LLM-Enabled Simulation
Dec 24, 2024Emergency response services are vital for enhancing public safety by safeguarding the environment, property, and human lives. As frontline members of these services, 9-1-1 dispatchers have a direct impact on response times and the overall effectiveness of emergency operations. However, traditional dispatcher training methods, which rely on role-playing by experienced personnel, are labor-intensive, time-consuming, and often neglect the specific needs of underserved communities. To address these challenges, we introduce Sim911, the first training simulation for 9-1-1 dispatchers powered by Large Language Models (LLMs). Sim911 enhances training through three key technical innovations: (1) knowledge construction, which utilizes archived 9-1-1 call data to generate simulations that closely mirror real-world scenarios; (2) context-aware controlled generation, which employs dynamic prompts and vector bases to ensure that LLM behavior aligns with training objectives; and (3) validation with looped correction, which filters out low-quality responses and refines the system performance.
Quantitative Predictive Monitoring and Control for Safe Human-Machine Interaction
Dec 17, 2024



There is a growing trend toward AI systems interacting with humans to revolutionize a range of application domains such as healthcare and transportation. However, unsafe human-machine interaction can lead to catastrophic failures. We propose a novel approach that predicts future states by accounting for the uncertainty of human interaction, monitors whether predictions satisfy or violate safety requirements, and adapts control actions based on the predictive monitoring results. Specifically, we develop a new quantitative predictive monitor based on Signal Temporal Logic with Uncertainty (STL-U) to compute a robustness degree interval, which indicates the extent to which a sequence of uncertain predictions satisfies or violates an STL-U requirement. We also develop a new loss function to guide the uncertainty calibration of Bayesian deep learning and a new adaptive control method, both of which leverage STL-U quantitative predictive monitoring results. We apply the proposed approach to two case studies: Type 1 Diabetes management and semi-autonomous driving. Experiments show that the proposed approach improves safety and effectiveness in both case studies.
Formal Logic-guided Robust Federated Learning against Poisoning Attacks
Nov 05, 2024



Federated Learning (FL) offers a promising solution to the privacy concerns associated with centralized Machine Learning (ML) by enabling decentralized, collaborative learning. However, FL is vulnerable to various security threats, including poisoning attacks, where adversarial clients manipulate the training data or model updates to degrade overall model performance. Recognizing this threat, researchers have focused on developing defense mechanisms to counteract poisoning attacks in FL systems. However, existing robust FL methods predominantly focus on computer vision tasks, leaving a gap in addressing the unique challenges of FL with time series data. In this paper, we present FLORAL, a defense mechanism designed to mitigate poisoning attacks in federated learning for time-series tasks, even in scenarios with heterogeneous client data and a large number of adversarial participants. Unlike traditional model-centric defenses, FLORAL leverages logical reasoning to evaluate client trustworthiness by aligning their predictions with global time-series patterns, rather than relying solely on the similarity of client updates. Our approach extracts logical reasoning properties from clients, then hierarchically infers global properties, and uses these to verify client updates. Through formal logic verification, we assess the robustness of each client contribution, identifying deviations indicative of adversarial behavior. Experimental results on two datasets demonstrate the superior performance of our approach compared to existing baseline methods, highlighting its potential to enhance the robustness of FL to time series applications. Notably, FLORAL reduced the prediction error by 93.27\% in the best-case scenario compared to the second-best baseline. Our code is available at \url{https://anonymous.4open.science/r/FLORAL-Robust-FTS}.