 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafety Generalization Under Distribution Shift in Safe Reinforcement Learning: A Diabetes Testbed
Jan 28, 2026Safe Reinforcement Learning (RL) algorithms are typically evaluated under fixed training conditions. We investigate whether training-time safety guarantees transfer to deployment under distribution shift, using diabetes management as a safety-critical testbed. We benchmark safe RL algorithms on a unified clinical simulator and reveal a safety generalization gap: policies satisfying constraints during training frequently violate safety requirements on unseen patients. We demonstrate that test-time shielding, which filters unsafe actions using learned dynamics models, effectively restores safety across algorithms and patient populations. Across eight safe RL algorithms, three diabetes types, and three age groups, shielding achieves Time-in-Range gains of 13--14\% for strong baselines such as PPO-Lag and CPO while reducing clinical risk index and glucose variability. Our simulator and benchmark provide a platform for studying safety under distribution shift in safety-critical control domains. Code is available at https://github.com/safe-autonomy-lab/GlucoSim and https://github.com/safe-autonomy-lab/GlucoAlg.
Quantitative Predictive Monitoring and Control for Safe Human-Machine Interaction
Dec 17, 2024



There is a growing trend toward AI systems interacting with humans to revolutionize a range of application domains such as healthcare and transportation. However, unsafe human-machine interaction can lead to catastrophic failures. We propose a novel approach that predicts future states by accounting for the uncertainty of human interaction, monitors whether predictions satisfy or violate safety requirements, and adapts control actions based on the predictive monitoring results. Specifically, we develop a new quantitative predictive monitor based on Signal Temporal Logic with Uncertainty (STL-U) to compute a robustness degree interval, which indicates the extent to which a sequence of uncertain predictions satisfies or violates an STL-U requirement. We also develop a new loss function to guide the uncertainty calibration of Bayesian deep learning and a new adaptive control method, both of which leverage STL-U quantitative predictive monitoring results. We apply the proposed approach to two case studies: Type 1 Diabetes management and semi-autonomous driving. Experiments show that the proposed approach improves safety and effectiveness in both case studies.
CARNA: Characterizing Advanced heart failure Risk and hemodyNAmic phenotypes using learned multi-valued decision diagrams
Jun 11, 2023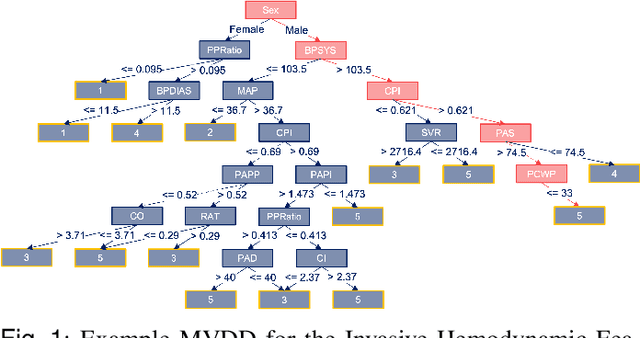
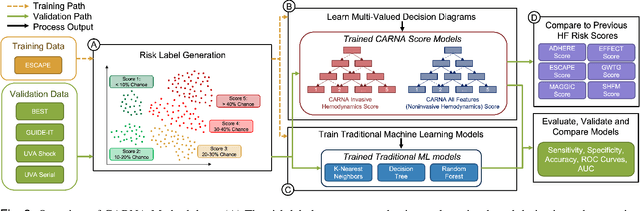
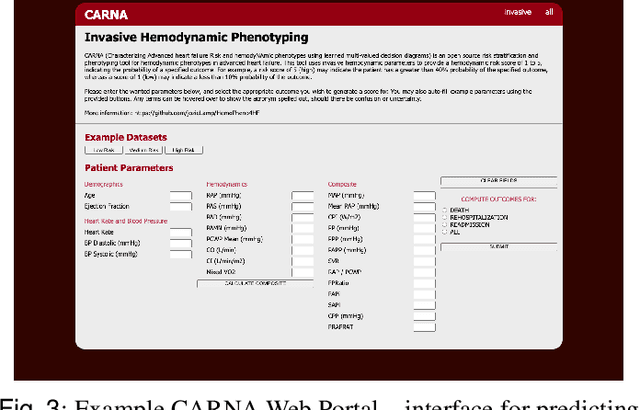
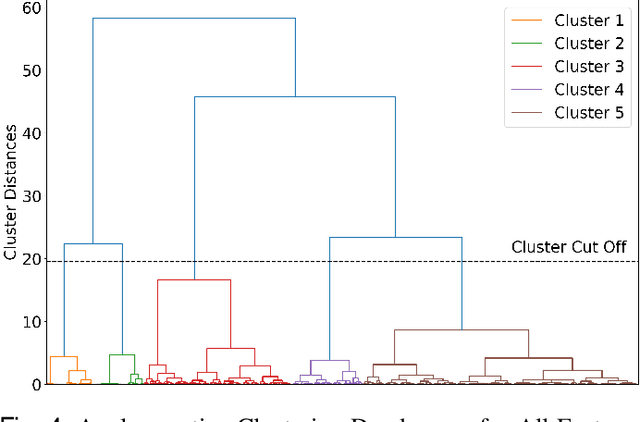
Early identification of high risk heart failure (HF) patients is key to timely allocation of life-saving therapies. Hemodynamic assessments can facilitate risk stratification and enhance understanding of HF trajectories. However, risk assessment for HF is a complex, multi-faceted decision-making process that can be challenging. Previous risk models for HF do not integrate invasive hemodynamics or support missing data, and use statistical methods prone to bias or machine learning methods that are not interpretable. To address these limitations, this paper presents CARNA, a hemodynamic risk stratification and phenotyping framework for advanced HF that takes advantage of the explainability and expressivity of machine learned Multi-Valued Decision Diagrams (MVDDs). This interpretable framework learns risk scores that predict the probability of patient outcomes, and outputs descriptive patient phenotypes (sets of features and thresholds) that characterize each predicted risk score. CARNA incorporates invasive hemodynamics and can make predictions on missing data. The CARNA models were trained and validated using a total of five advanced HF patient cohorts collected from previous trials, and compared with six established HF risk scores and three traditional ML risk models. CARNA provides robust risk stratification, outperforming all previous benchmarks. Although focused on advanced HF, the CARNA framework is general purpose and can be used to learn risk stratifications for other diseases and medical applications.
GlucoSynth: Generating Differentially-Private Synthetic Glucose Traces
Mar 02, 2023In this paper we focus on the problem of generating high-quality, private synthetic glucose traces, a task generalizable to many other time series sources. Existing methods for time series data synthesis, such as those using Generative Adversarial Networks (GANs), are not able to capture the innate characteristics of glucose data and, in terms of privacy, either do not include any formal privacy guarantees or, in order to uphold a strong formal privacy guarantee, severely degrade the utility of the synthetic data. Therefore, in this paper we present GlucoSynth, a novel privacy-preserving GAN framework to generate synthetic glucose traces. The core intuition in our approach is to conserve relationships amongst motifs (glucose events) within the traces, in addition to typical temporal dynamics. Moreover, we integrate differential privacy into the framework to provide strong formal privacy guarantees. Finally, we provide a comprehensive evaluation on the real-world utility of the data using 1.2 million glucose traces
Towards Developing Safety Assurance Cases for Learning-Enabled Medical Cyber-Physical Systems
Nov 23, 2022Machine Learning (ML) technologies have been increasingly adopted in Medical Cyber-Physical Systems (MCPS) to enable smart healthcare. Assuring the safety and effectiveness of learning-enabled MCPS is challenging, as such systems must account for diverse patient profiles and physiological dynamics and handle operational uncertainties. In this paper, we develop a safety assurance case for ML controllers in learning-enabled MCPS, with an emphasis on establishing confidence in the ML-based predictions. We present the safety assurance case in detail for Artificial Pancreas Systems (APS) as a representative application of learning-enabled MCPS, and provide a detailed analysis by implementing a deep neural network for the prediction in APS. We check the sufficiency of the ML data and analyze the correctness of the ML-based prediction using formal verification. Finally, we outline open research problems based on our experience in this paper.