 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEduSAT: A Pedagogical Tool for Theory and Applications of Boolean Satisfiability
Aug 15, 2023



Boolean Satisfiability (SAT) and Satisfiability Modulo Theories (SMT) are widely used in automated verification, but there is a lack of interactive tools designed for educational purposes in this field. To address this gap, we present EduSAT, a pedagogical tool specifically developed to support learning and understanding of SAT and SMT solving. EduSAT offers implementations of key algorithms such as the Davis-Putnam-Logemann-Loveland (DPLL) algorithm and the Reduced Order Binary Decision Diagram (ROBDD) for SAT solving. Additionally, EduSAT provides solver abstractions for five NP-complete problems beyond SAT and SMT. Users can benefit from EduSAT by experimenting, analyzing, and validating their understanding of SAT and SMT solving techniques. Our tool is accompanied by comprehensive documentation and tutorials, extensive testing, and practical features such as a natural language interface and SAT and SMT formula generators, which also serve as a valuable opportunity for learners to deepen their understanding. Our evaluation of EduSAT demonstrates its high accuracy, achieving 100% correctness across all the implemented SAT and SMT solvers. We release EduSAT as a python package in .whl file, and the source can be identified at https://github.com/zhaoy37/SAT_Solver.
BehaVerify: Verifying Temporal Logic Specifications for Behavior Trees
Aug 10, 2022
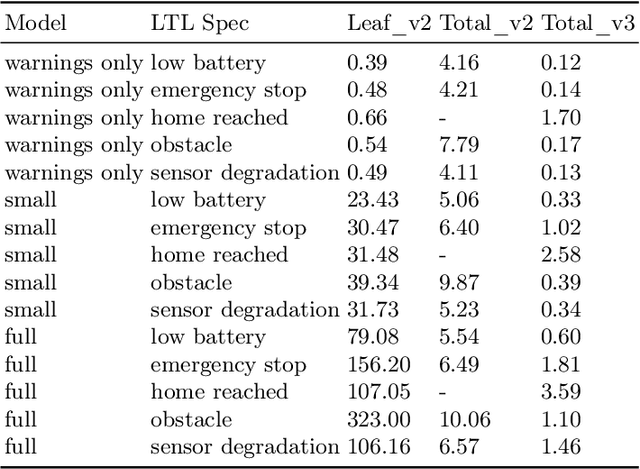
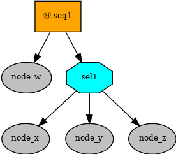
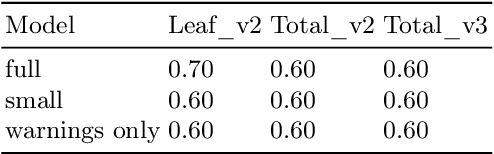
Behavior Trees, which originated in video games as a method for controlling NPCs but have since gained traction within the robotics community, are a framework for describing the execution of a task. BehaVerify is a tool that creates a nuXmv model from a py_tree. For composite nodes, which are standardized, this process is automatic and requires no additional user input. A wide variety of leaf nodes are automatically supported and require no additional user input, but customized leaf nodes will require additional user input to be correctly modeled. BehaVerify can provide a template to make this easier. BehaVerify is able to create a nuXmv model with over 100 nodes and nuXmv was able to verify various non-trivial LTL properties on this model, both directly and via counterexample. The model in question features parallel nodes, selector, and sequence nodes. A comparison with models based on BTCompiler indicates that the models created by BehaVerify perform better.
The Second International Verification of Neural Networks Competition (VNN-COMP 2021): Summary and Results
Aug 31, 2021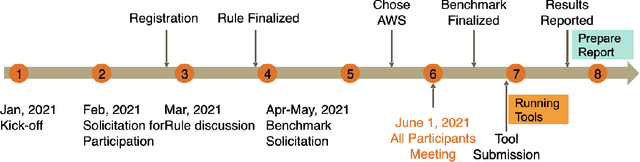
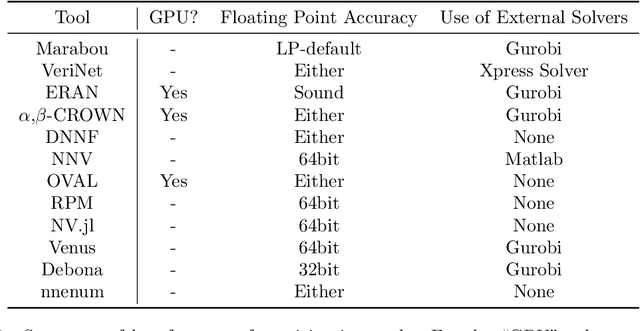
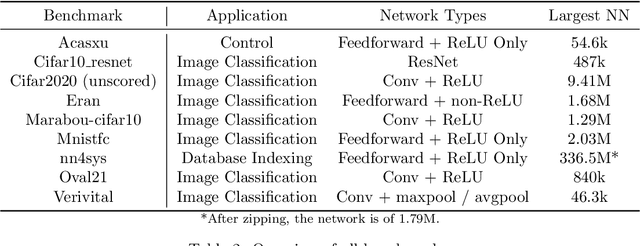

This report summarizes the second International Verification of Neural Networks Competition (VNN-COMP 2021), held as a part of the 4th Workshop on Formal Methods for ML-Enabled Autonomous Systems that was collocated with the 33rd International Conference on Computer-Aided Verification (CAV). Twelve teams participated in this competition. The goal of the competition is to provide an objective comparison of the state-of-the-art methods in neural network verification, in terms of scalability and speed. Along this line, we used standard formats (ONNX for neural networks and VNNLIB for specifications), standard hardware (all tools are run by the organizers on AWS), and tool parameters provided by the tool authors. This report summarizes the rules, benchmarks, participating tools, results, and lessons learned from this competition.
Reachability Analysis for Feed-Forward Neural Networks using Face Lattices
Mar 02, 2020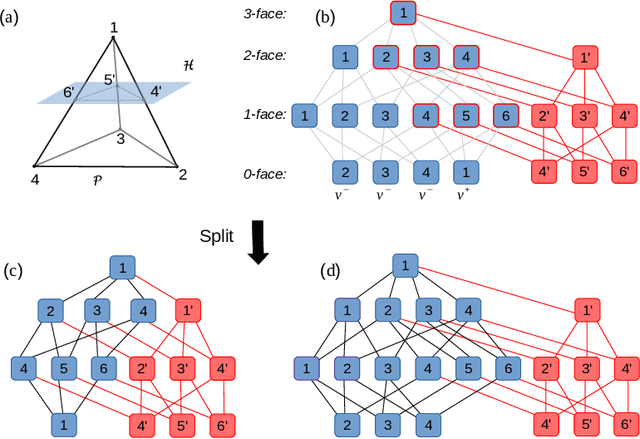
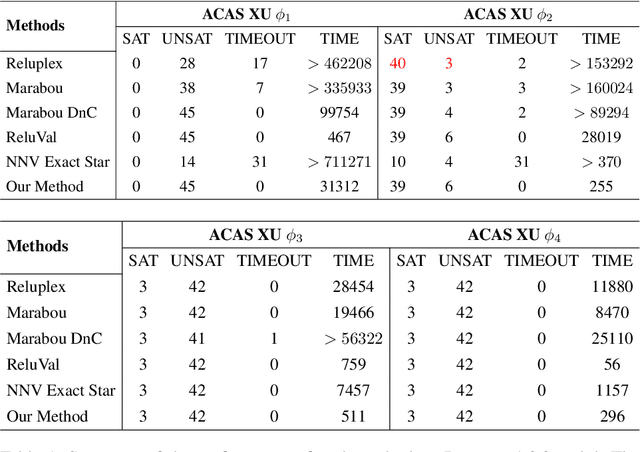
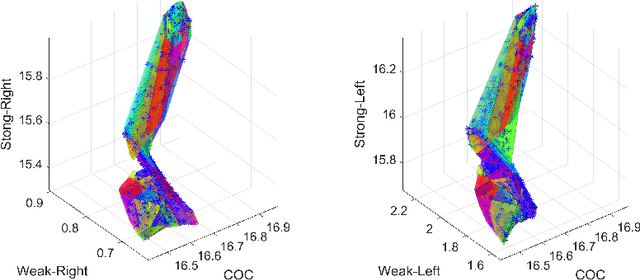
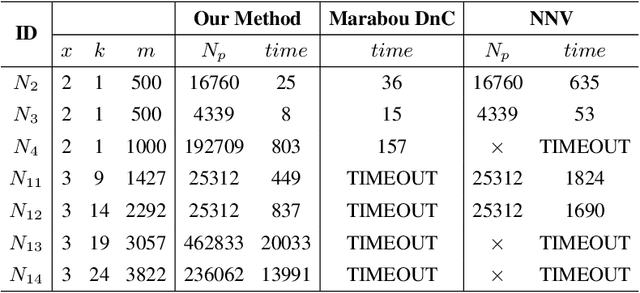
Deep neural networks have been widely applied as an effective approach to handle complex and practical problems. However, one of the most fundamental open problems is the lack of formal methods to analyze the safety of their behaviors. To address this challenge, we propose a parallelizable technique to compute exact reachable sets of a neural network to an input set. Our method currently focuses on feed-forward neural networks with ReLU activation functions. One of the primary challenges for polytope-based approaches is identifying the intersection between intermediate polytopes and hyperplanes from neurons. In this regard, we present a new approach to construct the polytopes with the face lattice, a complete combinatorial structure. The correctness and performance of our methodology are evaluated by verifying the safety of ACAS Xu networks and other benchmarks. Compared to state-of-the-art methods such as Reluplex, Marabou, and NNV, our approach exhibits a significantly higher efficiency. Additionally, our approach is capable of constructing the complete input set given an output set, so that any input that leads to safety violation can be tracked.
The NUbots Team Description Paper 2014
Mar 27, 2014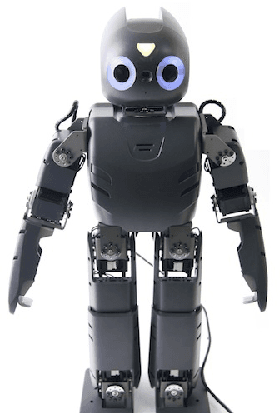
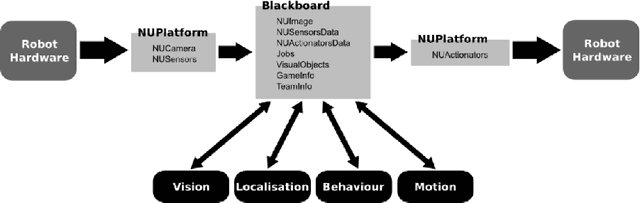
The NUbots team, from The University of Newcastle, Australia, has had a strong record of success in the RoboCup Standard Platform League since first entering in 2002. The team has also competed within the RoboCup Humanoid Kid-Size League since 2012. The 2014 team brings a renewed focus on software architecture, modularity, and the ability to easily share code. This paper summarizes the history of the NUbots team, describes the roles and research of the team members, gives an overview of the NUbots' robots and software system, and addresses relevant research projects within the the Newcastle Robotics Laboratory.