 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Director: A Composable Behaviour System with Soft Transitions
Sep 17, 2023


Software frameworks for behaviour are critical in robotics as they enable the correct and efficient execution of functions. While modern behaviour systems have improved their composability, they do not focus on smooth transitions and often lack functionality. In this work, we present the Director, a novel behaviour framework and algorithm that addresses these problems. It has functionality for soft transitions, multiple implementations of the same action chosen based on conditionals, and strict resource control. This system has shown success in the Humanoid Kid Size 2022/2023 Virtual Season and the Humanoid Kid Size RoboCup 2023 Bordeaux competition.
Visual Mesh: Real-time Object Detection Using Constant Sample Density
Jul 23, 2018



This paper proposes an enhancement of convolutional neural networks for object detection in resource-constrained robotics through a geometric input transformation called Visual Mesh. It uses object geometry to create a graph in vision space, reducing computational complexity by normalizing the pixel and feature density of objects. The experiments compare the Visual Mesh with several other fast convolutional neural networks. The results demonstrate execution times sixteen times quicker than the fastest competitor tested, while achieving outstanding accuracy.
The NUbots Team Description Paper 2015
Feb 11, 2015
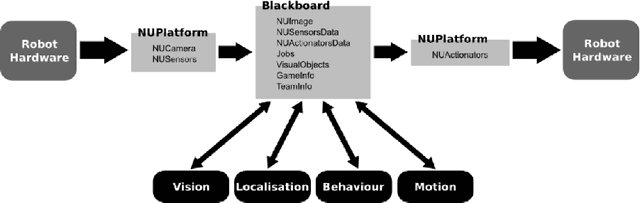
The NUbots are an interdisciplinary RoboCup team from The University of Newcastle, Australia. The team has a history of strong contributions in the areas of machine learning and computer vision. The NUbots have participated in RoboCup leagues since 2002, placing first several times in the past. In 2014 the NUbots also partnered with the University of Newcastle Mechatronics Laboratory to participate in the RobotX Marine Robotics Challenge, which resulted in several new ideas and improvements to the NUbots vision system for RoboCup. This paper summarizes the history of the NUbots team, describes the roles and research of the team members, gives an overview of the NUbots' robots, their software system, and several associated research projects.
The NUbots Team Description Paper 2014
Mar 27, 2014The NUbots team, from The University of Newcastle, Australia, has had a strong record of success in the RoboCup Standard Platform League since first entering in 2002. The team has also competed within the RoboCup Humanoid Kid-Size League since 2012. The 2014 team brings a renewed focus on software architecture, modularity, and the ability to easily share code. This paper summarizes the history of the NUbots team, describes the roles and research of the team members, gives an overview of the NUbots' robots and software system, and addresses relevant research projects within the the Newcastle Robotics Laboratory.