 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEfficient Neural Hybrid System Learning and Transition System Abstraction for Dynamical Systems
Nov 15, 2024


This paper proposes a neural network hybrid modeling framework for dynamics learning to promote an interpretable, computationally efficient way of dynamics learning and system identification. First, a low-level model will be trained to learn the system dynamics, which utilizes multiple simple neural networks to approximate the local dynamics generated from data-driven partitions. Then, based on the low-level model, a high-level model will be trained to abstract the low-level neural hybrid system model into a transition system that allows Computational Tree Logic Verification to promote the model's ability with human interaction and verification efficiency.
Compression Repair for Feedforward Neural Networks Based on Model Equivalence Evaluation
Feb 18, 2024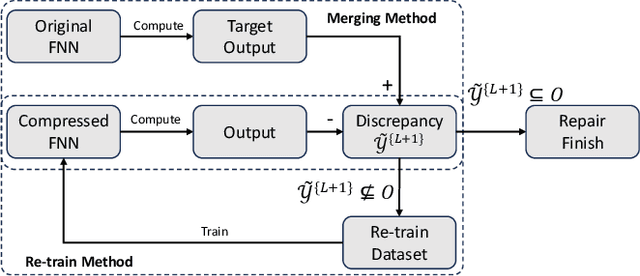
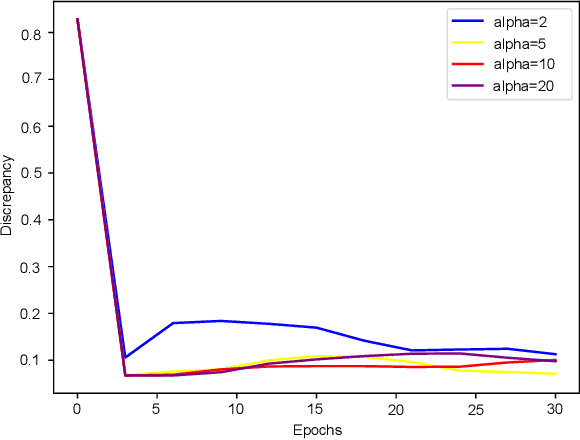
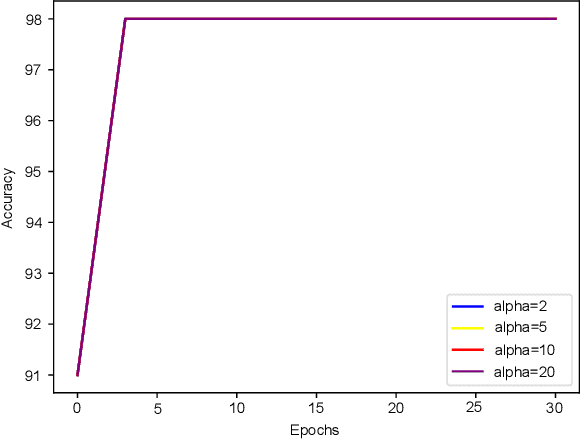
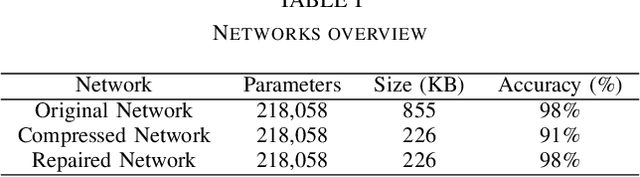
In this paper, we propose a method of repairing compressed Feedforward Neural Networks (FNNs) based on equivalence evaluation of two neural networks. In the repairing framework, a novel neural network equivalence evaluation method is developed to compute the output discrepancy between two neural networks. The output discrepancy can quantitatively characterize the output difference produced by compression procedures. Based on the computed output discrepancy, the repairing method first initializes a new training set for the compressed networks to narrow down the discrepancy between the two neural networks and improve the performance of the compressed network. Then, we repair the compressed FNN by re-training based on the training set. We apply our developed method to the MNIST dataset to demonstrate the effectiveness and advantages of our proposed repair method.
A Transition System Abstraction Framework for Neural Network Dynamical System Models
Feb 18, 2024


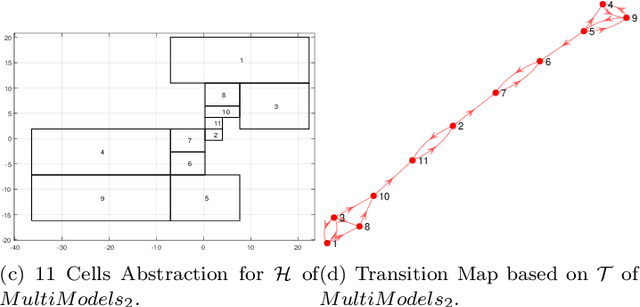
This paper proposes a transition system abstraction framework for neural network dynamical system models to enhance the model interpretability, with applications to complex dynamical systems such as human behavior learning and verification. To begin with, the localized working zone will be segmented into multiple localized partitions under the data-driven Maximum Entropy (ME) partitioning method. Then, the transition matrix will be obtained based on the set-valued reachability analysis of neural networks. Finally, applications to human handwriting dynamics learning and verification are given to validate our proposed abstraction framework, which demonstrates the advantages of enhancing the interpretability of the black-box model, i.e., our proposed framework is able to abstract a data-driven neural network model into a transition system, making the neural network model interpretable through verifying specifications described in Computational Tree Logic (CTL) languages.
Energy Efficient Robust Beamforming for Vehicular ISAC with Imperfect Channel Estimation
Oct 26, 2023This paper investigates robust beamforming for system-centric energy efficiency (EE) optimization in the vehicular integrated sensing and communication (ISAC) system, where the mobility of vehicles poses significant challenges to channel estimation. To obtain the optimal beamforming under channel uncertainty, we first formulate an optimization problem for maximizing the system EE under bounded channel estimation errors. Next, fractional programming and semidefinite relaxation (SDR) are utilized to relax the rank-1 constraints. We further use Schur complement and S-Procedure to transform Cramer-Rao bound (CRB) and channel estimation error constraints into convex forms, respectively. Based on the Lagrangian dual function and Karush-Kuhn-Tucker (KKT) conditions, it is proved that the optimal beamforming solution is rank-1. Finally, we present comprehensive simulation results to demonstrate two key findings: 1) the proposed algorithm exhibits a favorable convergence rate, and 2) the approach effectively mitigates the impact of channel estimation errors.
Guaranteed Quantization Error Computation for Neural Network Model Compression
Apr 26, 2023

Neural network model compression techniques can address the computation issue of deep neural networks on embedded devices in industrial systems. The guaranteed output error computation problem for neural network compression with quantization is addressed in this paper. A merged neural network is built from a feedforward neural network and its quantized version to produce the exact output difference between two neural networks. Then, optimization-based methods and reachability analysis methods are applied to the merged neural network to compute the guaranteed quantization error. Finally, a numerical example is proposed to validate the applicability and effectiveness of the proposed approach.
A Data-Driven Hybrid Automaton Framework to Modeling Complex Dynamical Systems
Apr 26, 2023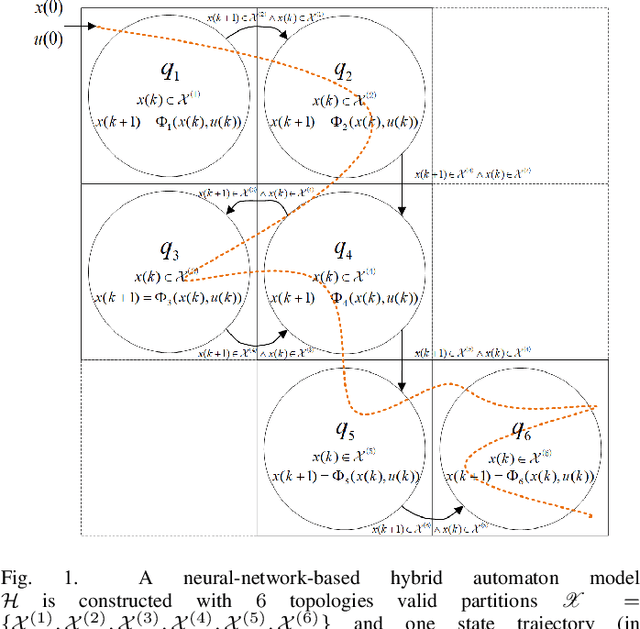
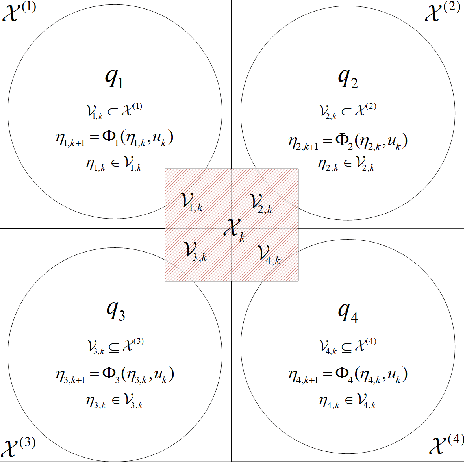
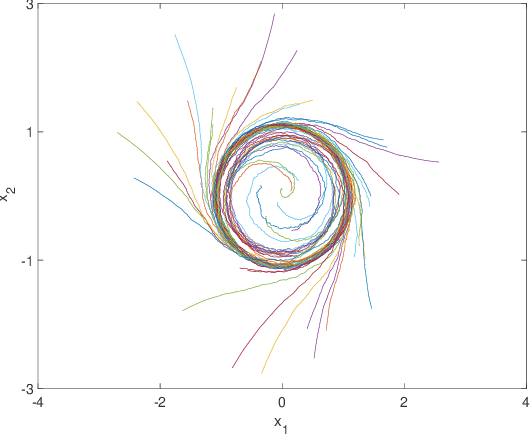
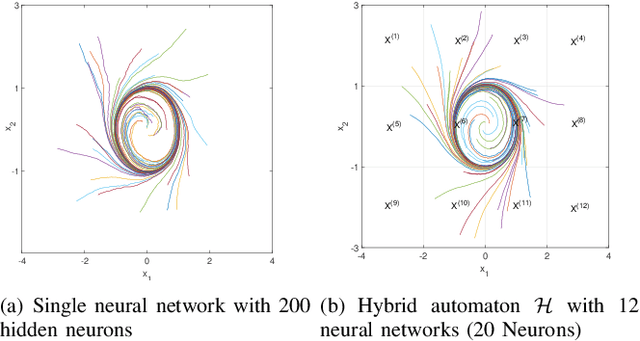
In this paper, a computationally efficient data-driven hybrid automaton model is proposed to capture unknown complex dynamical system behaviors using multiple neural networks. The sampled data of the system is divided by valid partitions into groups corresponding to their topologies and based on which, transition guards are defined. Then, a collection of small-scale neural networks that are computationally efficient are trained as the local dynamical description for their corresponding topologies. After modeling the system with a neural-network-based hybrid automaton, the set-valued reachability analysis with low computation cost is provided based on interval analysis and a split and combined process. At last, a numerical example of the limit cycle is presented to illustrate that the developed models can significantly reduce the computational cost in reachable set computation without sacrificing any modeling precision.
Safety Verification of Neural Network Control Systems Using Guaranteed Neural Network Model Reduction
Jan 17, 2023This paper aims to enhance the computational efficiency of safety verification of neural network control systems by developing a guaranteed neural network model reduction method. First, a concept of model reduction precision is proposed to describe the guaranteed distance between the outputs of a neural network and its reduced-size version. A reachability-based algorithm is proposed to accurately compute the model reduction precision. Then, by substituting a reduced-size neural network controller into the closed-loop system, an algorithm to compute the reachable set of the original system is developed, which is able to support much more computationally efficient safety verification processes. Finally, the developed methods are applied to a case study of the Adaptive Cruise Control system with a neural network controller, which is shown to significantly reduce the computational time of safety verification and thus validate the effectiveness of the method.
Approximate Bisimulation Relations for Neural Networks and Application to Assured Neural Network Compression
Feb 02, 2022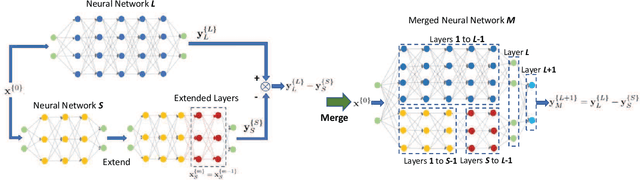
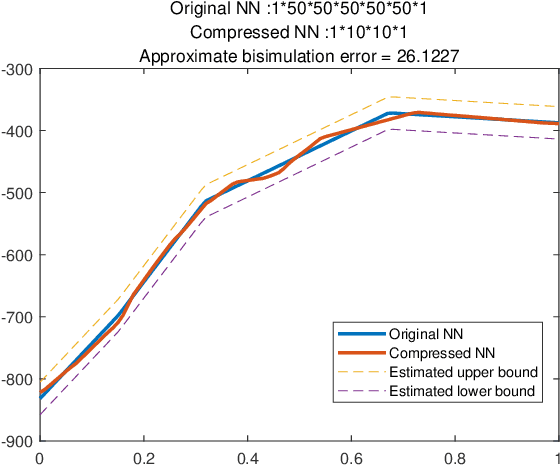
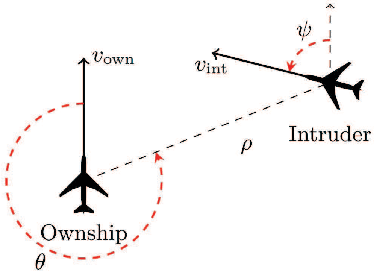
In this paper, we propose a concept of approximate bisimulation relation for feedforward neural networks. In the framework of approximate bisimulation relation, a novel neural network merging method is developed to compute the approximate bisimulation error between two neural networks based on reachability analysis of neural networks. The developed method is able to quantitatively measure the distance between the outputs of two neural networks with the same inputs. Then, we apply the approximate bisimulation relation results to perform neural networks model reduction and compute the compression precision, i.e., assured neural networks compression. At last, using the assured neural network compression, we accelerate the verification processes of ACAS Xu neural networks to illustrate the effectiveness and advantages of our proposed approximate bisimulation approach.
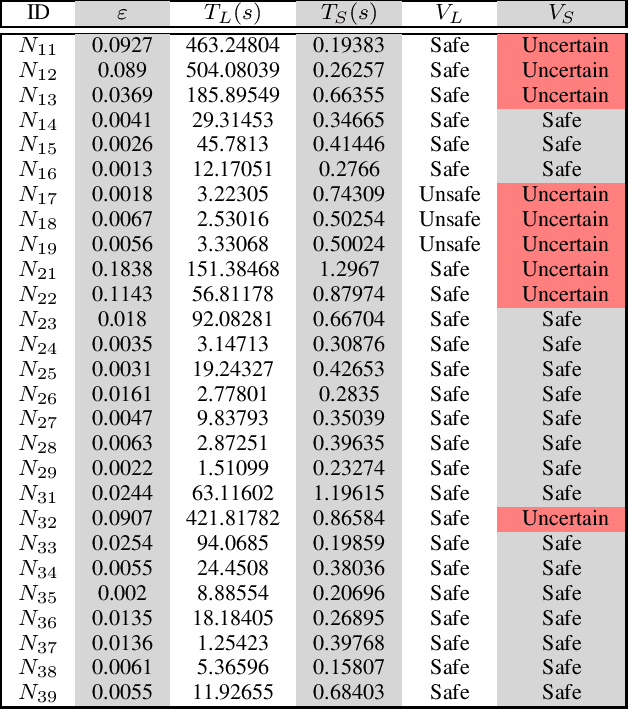
Robust Optimization Framework for Training Shallow Neural Networks Using Reachability Method
Jul 27, 2021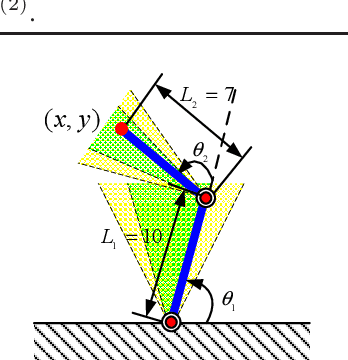
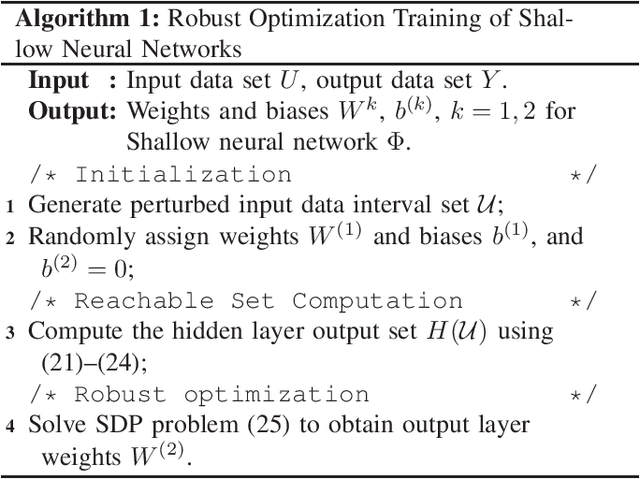
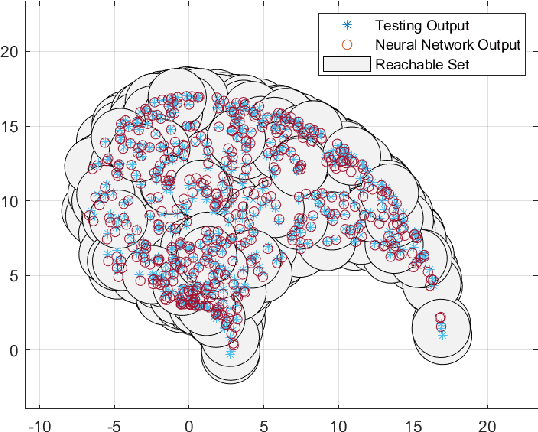
In this paper, a robust optimization framework is developed to train shallow neural networks based on reachability analysis of neural networks. To characterize noises of input data, the input training data is disturbed in the description of interval sets. Interval-based reachability analysis is then performed for the hidden layer. With the reachability analysis results, a robust optimization training method is developed in the framework of robust least-square problems. Then, the developed robust least-square problem is relaxed to a semidefinite programming problem. It has been shown that the developed robust learning method can provide better robustness against perturbations at the price of loss of training accuracy to some extent. At last, the proposed method is evaluated on a robot arm model learning example.
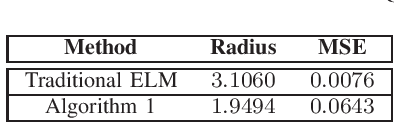
Verification of Deep Convolutional Neural Networks Using ImageStars
May 14, 2020
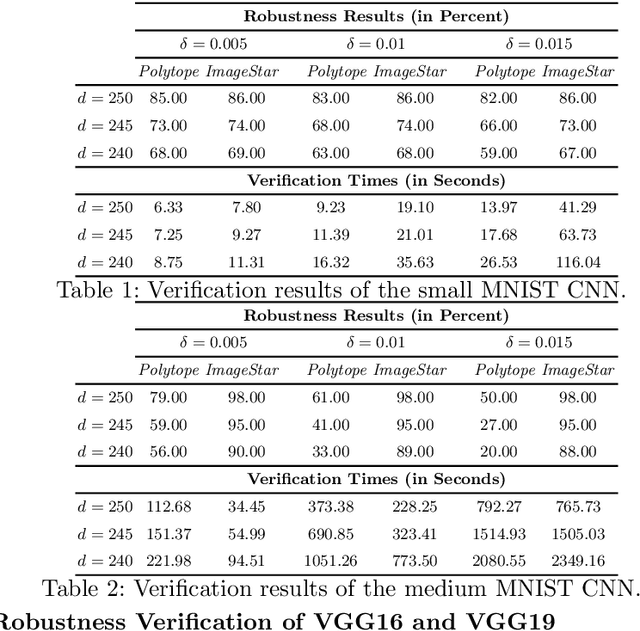
Convolutional Neural Networks (CNN) have redefined the state-of-the-art in many real-world applications, such as facial recognition, image classification, human pose estimation, and semantic segmentation. Despite their success, CNNs are vulnerable to adversarial attacks, where slight changes to their inputs may lead to sharp changes in their output in even well-trained networks. Set-based analysis methods can detect or prove the absence of bounded adversarial attacks, which can then be used to evaluate the effectiveness of neural network training methodology. Unfortunately, existing verification approaches have limited scalability in terms of the size of networks that can be analyzed. In this paper, we describe a set-based framework that successfully deals with real-world CNNs, such as VGG16 and VGG19, that have high accuracy on ImageNet. Our approach is based on a new set representation called the ImageStar, which enables efficient exact and over-approximative analysis of CNNs. ImageStars perform efficient set-based analysis by combining operations on concrete images with linear programming (LP). Our approach is implemented in a tool called NNV, and can verify the robustness of VGG networks with respect to a small set of input states, derived from adversarial attacks, such as the DeepFool attack. The experimental results show that our approach is less conservative and faster than existing zonotope methods, such as those used in DeepZ, and the polytope method used in DeepPoly.