 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnergy Efficient Robust Beamforming for Vehicular ISAC with Imperfect Channel Estimation
Oct 26, 2023This paper investigates robust beamforming for system-centric energy efficiency (EE) optimization in the vehicular integrated sensing and communication (ISAC) system, where the mobility of vehicles poses significant challenges to channel estimation. To obtain the optimal beamforming under channel uncertainty, we first formulate an optimization problem for maximizing the system EE under bounded channel estimation errors. Next, fractional programming and semidefinite relaxation (SDR) are utilized to relax the rank-1 constraints. We further use Schur complement and S-Procedure to transform Cramer-Rao bound (CRB) and channel estimation error constraints into convex forms, respectively. Based on the Lagrangian dual function and Karush-Kuhn-Tucker (KKT) conditions, it is proved that the optimal beamforming solution is rank-1. Finally, we present comprehensive simulation results to demonstrate two key findings: 1) the proposed algorithm exhibits a favorable convergence rate, and 2) the approach effectively mitigates the impact of channel estimation errors.
Sample-efficient Model Predictive Control Design of Soft Robotics by Bayesian Optimization
Oct 17, 2022
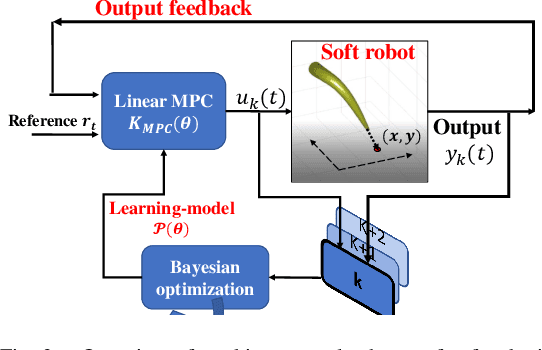
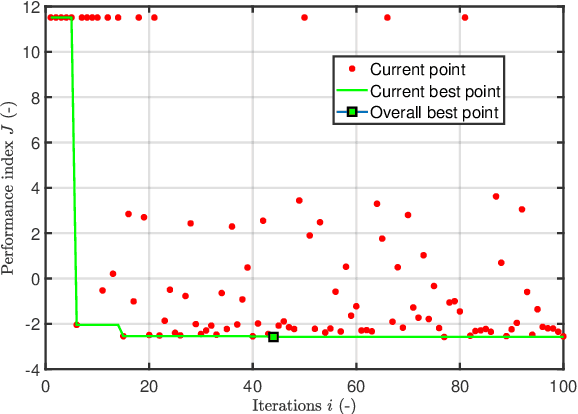
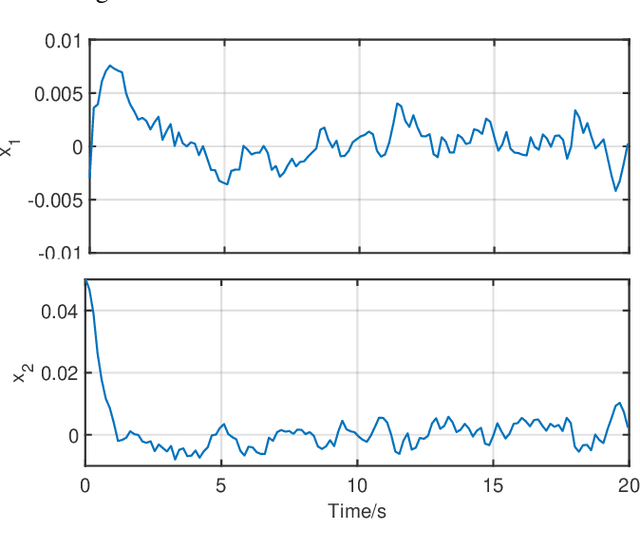
This paper presents a sample-efficient data-driven method to design model predictive control (MPC) for cable-actuated soft robotics using Bayesian optimization. Instead of modeling the complex dynamics of the soft robots, the proposed approach uses Bayesian optimization to search the best-guessed low-dimensional prediction model and its associated controller to minimize the objective function of closed-loop responses. The prediction model is updated by Bayesian optimization from the closed-loop input-output data in each iteration. A linear MPC is then designed based on the updated prediction model, and evaluated based on the closed-loop responses. Different from directly searching controller parameters, the closed-loop system stability, and inputs/outputs constraints can be easily handled in the MPC design. After a few iterations, a convergent solution of a (sub-)optimal controller can be obtained, which minimizes the user-defined closed-loop performance index. The proposed method is simulated and validated by a high-fidelity simulation of a cable-actuated soft robot. The simulation results demonstrate that the proposed approach can achieve desired tracking controller for the soft robot without a prior-known model.