 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCITRAS: Covariate-Informed Transformer for Time Series Forecasting
Mar 31, 2025Covariates play an indispensable role in practical time series forecasting, offering rich context from the past and sometimes extending into the future. However, their availability varies depending on the scenario, and situations often involve multiple target variables simultaneously. Moreover, the cross-variate dependencies between them are multi-granular, with some covariates having a short-term impact on target variables and others showing long-term correlations. This heterogeneity and the intricate dependencies arising in covariate-informed forecasting present significant challenges to existing deep models. To address these issues, we propose CITRAS, a patch-based Transformer that flexibly leverages multiple targets and covariates covering both the past and the future forecasting horizon. While preserving the strong autoregressive capabilities of the canonical Transformer, CITRAS introduces two novel mechanisms in patch-wise cross-variate attention: Key-Value (KV) Shift and Attention Score Smoothing. KV Shift seamlessly incorporates future known covariates into the forecasting of target variables based on their concurrent dependencies. Additionally, Attention Score Smoothing transforms locally accurate patch-wise cross-variate dependencies into global variate-level dependencies by smoothing the past series of attention scores. Experimentally, CITRAS achieves state-of-the-art performance in both covariate-informed and multivariate forecasting, demonstrating its versatile ability to leverage cross-variate dependency for improved forecasting accuracy.
Sample-efficient Model Predictive Control Design of Soft Robotics by Bayesian Optimization
Oct 17, 2022
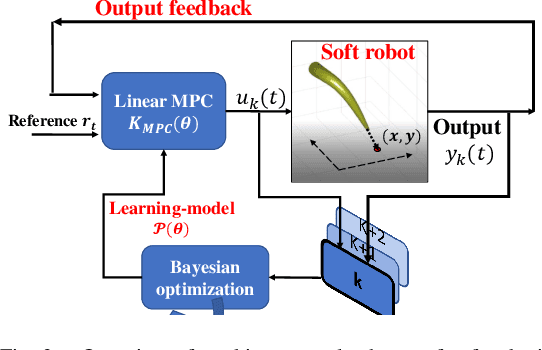
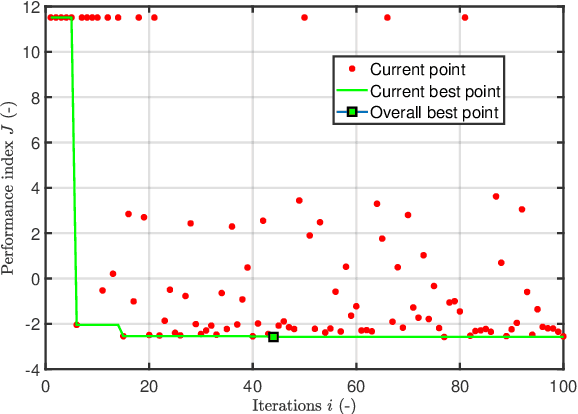
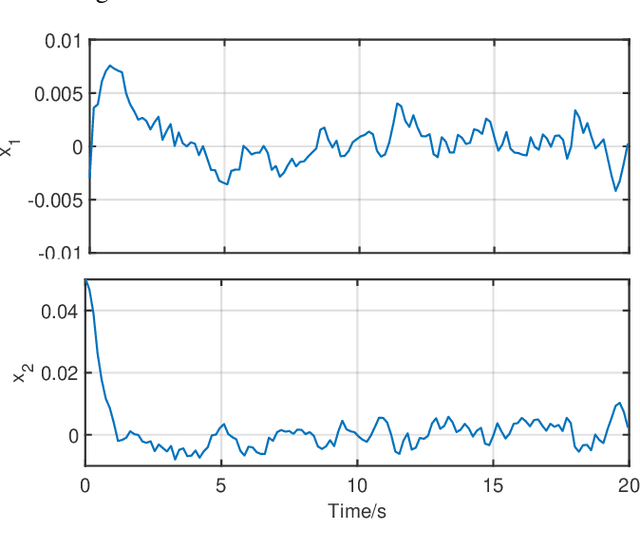
This paper presents a sample-efficient data-driven method to design model predictive control (MPC) for cable-actuated soft robotics using Bayesian optimization. Instead of modeling the complex dynamics of the soft robots, the proposed approach uses Bayesian optimization to search the best-guessed low-dimensional prediction model and its associated controller to minimize the objective function of closed-loop responses. The prediction model is updated by Bayesian optimization from the closed-loop input-output data in each iteration. A linear MPC is then designed based on the updated prediction model, and evaluated based on the closed-loop responses. Different from directly searching controller parameters, the closed-loop system stability, and inputs/outputs constraints can be easily handled in the MPC design. After a few iterations, a convergent solution of a (sub-)optimal controller can be obtained, which minimizes the user-defined closed-loop performance index. The proposed method is simulated and validated by a high-fidelity simulation of a cable-actuated soft robot. The simulation results demonstrate that the proposed approach can achieve desired tracking controller for the soft robot without a prior-known model.
Cycle-Contrast for Self-Supervised Video Representation Learning
Oct 28, 2020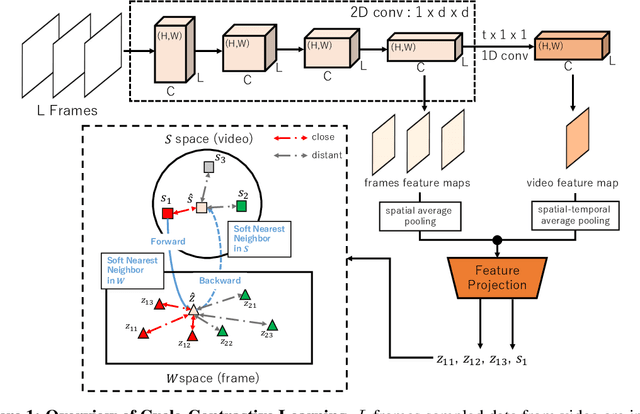
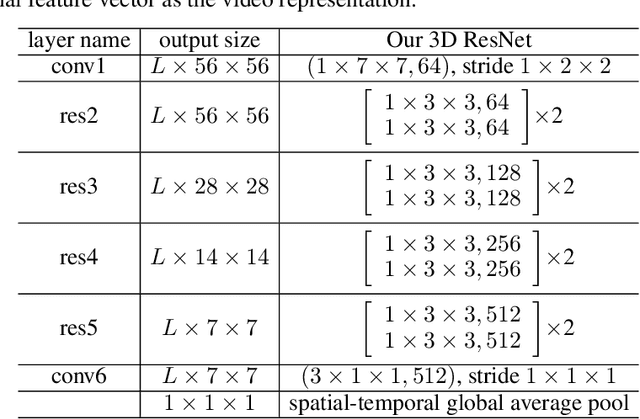
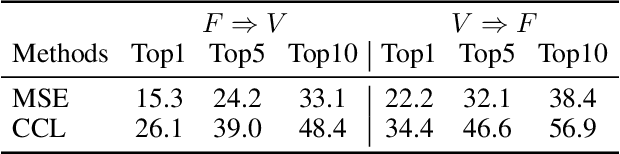
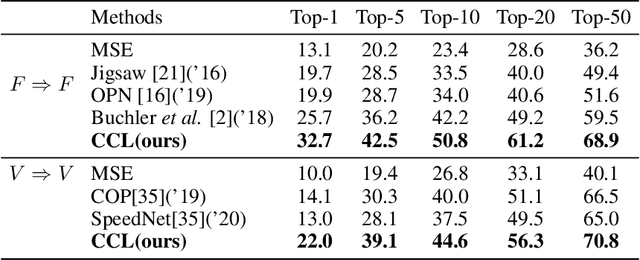
We present Cycle-Contrastive Learning (CCL), a novel self-supervised method for learning video representation. Following a nature that there is a belong and inclusion relation of video and its frames, CCL is designed to find correspondences across frames and videos considering the contrastive representation in their domains respectively. It is different from recent approaches that merely learn correspondences across frames or clips. In our method, the frame and video representations are learned from a single network based on an R3D architecture, with a shared non-linear transformation for embedding both frame and video features before the cycle-contrastive loss. We demonstrate that the video representation learned by CCL can be transferred well to downstream tasks of video understanding, outperforming previous methods in nearest neighbour retrieval and action recognition tasks on UCF101, HMDB51 and MMAct.
DeepCO: Offline Combinatorial Optimization Framework Utilizing Deep Learning
Jul 20, 2020Combinatorial optimization serves as an essential part in many modern industrial applications. A great number of the problems are offline setting due to safety and/or cost issues. While simulation-based approaches appear difficult to realise for complicated systems, in this research, we propose DeepCO, an offline combinatorial optimization framework utilizing deep learning. We also design an offline variation of Travelling Salesman Problem (TSP) to model warehouse operation sequence optimization problem for evaluation. With only limited historical data, novel proposed distribution regularized optimization method outperforms existing baseline method in offline TSP experiment reducing route length by 5.7% averagely and shows great potential in real world problems.