Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEfficient Neural Hybrid System Learning and Transition System Abstraction for Dynamical Systems
Paper and Code
Nov 15, 2024
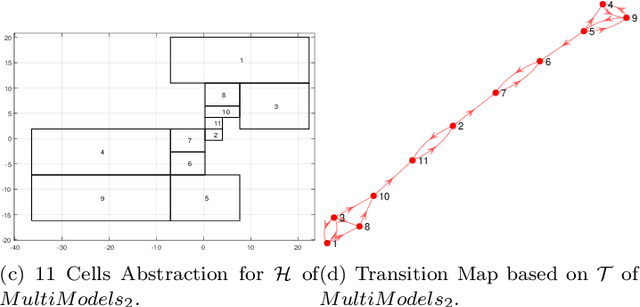


This paper proposes a neural network hybrid modeling framework for dynamics learning to promote an interpretable, computationally efficient way of dynamics learning and system identification. First, a low-level model will be trained to learn the system dynamics, which utilizes multiple simple neural networks to approximate the local dynamics generated from data-driven partitions. Then, based on the low-level model, a high-level model will be trained to abstract the low-level neural hybrid system model into a transition system that allows Computational Tree Logic Verification to promote the model's ability with human interaction and verification efficiency.
View paper on