 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafety Verification of Neural Network Control Systems Using Guaranteed Neural Network Model Reduction
Jan 17, 2023This paper aims to enhance the computational efficiency of safety verification of neural network control systems by developing a guaranteed neural network model reduction method. First, a concept of model reduction precision is proposed to describe the guaranteed distance between the outputs of a neural network and its reduced-size version. A reachability-based algorithm is proposed to accurately compute the model reduction precision. Then, by substituting a reduced-size neural network controller into the closed-loop system, an algorithm to compute the reachable set of the original system is developed, which is able to support much more computationally efficient safety verification processes. Finally, the developed methods are applied to a case study of the Adaptive Cruise Control system with a neural network controller, which is shown to significantly reduce the computational time of safety verification and thus validate the effectiveness of the method.
Approximate Bisimulation Relations for Neural Networks and Application to Assured Neural Network Compression
Feb 02, 2022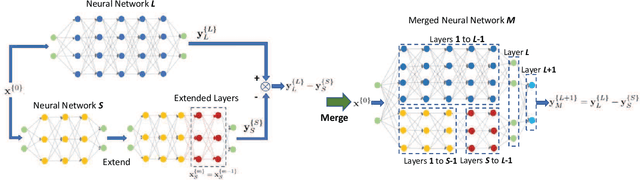
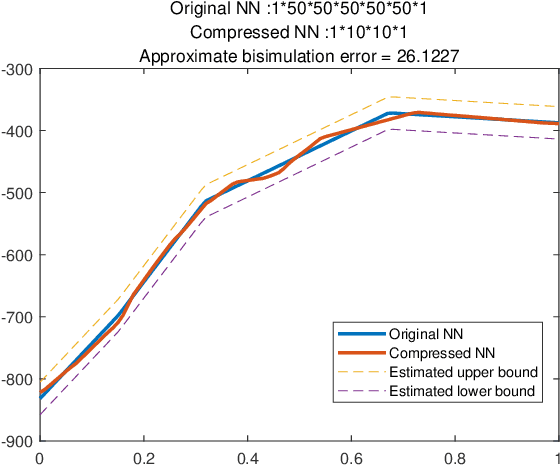
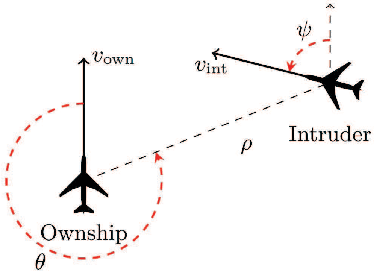
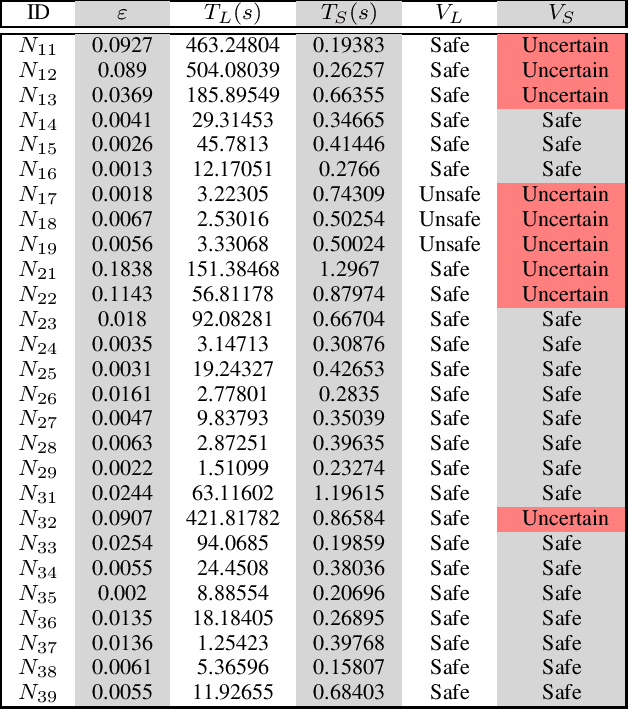
In this paper, we propose a concept of approximate bisimulation relation for feedforward neural networks. In the framework of approximate bisimulation relation, a novel neural network merging method is developed to compute the approximate bisimulation error between two neural networks based on reachability analysis of neural networks. The developed method is able to quantitatively measure the distance between the outputs of two neural networks with the same inputs. Then, we apply the approximate bisimulation relation results to perform neural networks model reduction and compute the compression precision, i.e., assured neural networks compression. At last, using the assured neural network compression, we accelerate the verification processes of ACAS Xu neural networks to illustrate the effectiveness and advantages of our proposed approximate bisimulation approach.