 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeV2X-Sim: A Virtual Collaborative Perception Dataset for Autonomous Driving
Paper and Code
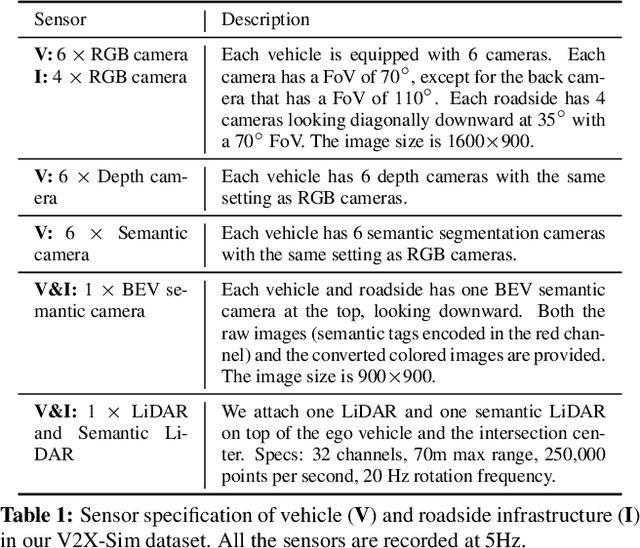
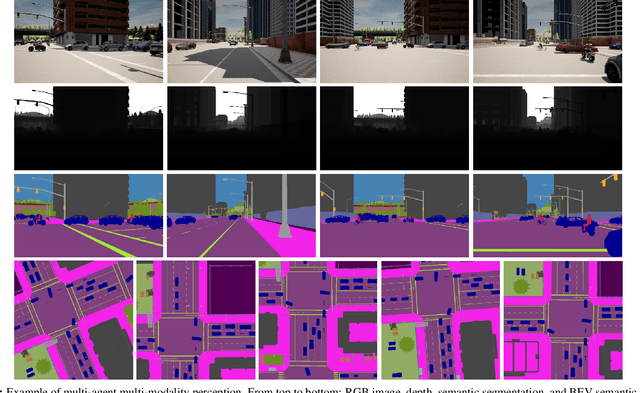
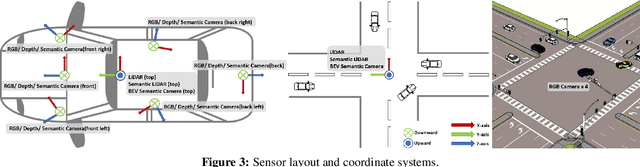
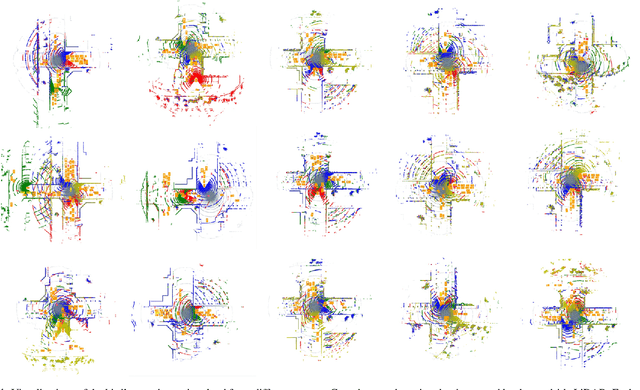
Vehicle-to-everything (V2X), which denotes the collaboration between a vehicle and any entity in its surrounding, can fundamentally improve the perception in self-driving systems. As the individual perception rapidly advances, collaborative perception has made little progress due to the shortage of public V2X datasets. In this work, we present the V2X-Sim dataset, the first public large-scale collaborative perception dataset in autonomous driving. V2X-Sim provides: 1) well-synchronized recordings from roadside infrastructure and multiple vehicles at the intersection to enable collaborative perception, 2) multi-modality sensor streams to facilitate multi-modality perception, 3) diverse well-annotated ground truth to support various downstream tasks including detection, tracking, and segmentation. We seek to inspire research on multi-agent multi-modality multi-task perception, and our virtual dataset is promising to promote the development of collaborative perception before realistic datasets become widely available.