 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHiST-VLA: A Hierarchical Spatio-Temporal Vision-Language-Action Model for End-to-End Autonomous Driving
Feb 11, 2026Vision-Language-Action (VLA) models offer promising capabilities for autonomous driving through multimodal understanding. However, their utilization in safety-critical scenarios is constrained by inherent limitations, including imprecise numerical reasoning, weak 3D spatial awareness, and high sensitivity to context. To address these challenges, we propose HiST-VLA, a novel Hierarchical Spatio-Temporal VLA model designed for reliable trajectory generation. Our framework enhances 3D spatial and temporal reasoning by integrating geometric awareness with fine-grained driving commands and state history prompting. To ensure computational efficiency, we integrate dynamic token sparsification into the VLA architecture. This approach fuses redundant tokens rather than filtering them, effectively reducing redundancy without sacrificing model performance. Furthermore, we employ a hierarchical transformer-based planner to progressively refine coarse VLA waypoints into fine-grained trajectories. Crucially, the planner utilizes dynamic latent regularization to incorporate language commands, ensuring strict spatial grounding and temporal coherence. Extensive evaluation on the NAVSIM v2 benchmark demonstrates state-of-the-art performance on Navtest, achieving an EPDMS of 88.6, and EPDMS of 50.9 on pseudo closed-loop Navhard benchmark.
FlowDrive: Energy Flow Field for End-to-End Autonomous Driving
Sep 17, 2025Recent advances in end-to-end autonomous driving leverage multi-view images to construct BEV representations for motion planning. In motion planning, autonomous vehicles need considering both hard constraints imposed by geometrically occupied obstacles (e.g., vehicles, pedestrians) and soft, rule-based semantics with no explicit geometry (e.g., lane boundaries, traffic priors). However, existing end-to-end frameworks typically rely on BEV features learned in an implicit manner, lacking explicit modeling of risk and guidance priors for safe and interpretable planning. To address this, we propose FlowDrive, a novel framework that introduces physically interpretable energy-based flow fields-including risk potential and lane attraction fields-to encode semantic priors and safety cues into the BEV space. These flow-aware features enable adaptive refinement of anchor trajectories and serve as interpretable guidance for trajectory generation. Moreover, FlowDrive decouples motion intent prediction from trajectory denoising via a conditional diffusion planner with feature-level gating, alleviating task interference and enhancing multimodal diversity. Experiments on the NAVSIM v2 benchmark demonstrate that FlowDrive achieves state-of-the-art performance with an EPDMS of 86.3, surpassing prior baselines in both safety and planning quality. The project is available at https://astrixdrive.github.io/FlowDrive.github.io/.
DiffVLA: Vision-Language Guided Diffusion Planning for Autonomous Driving
May 26, 2025Research interest in end-to-end autonomous driving has surged owing to its fully differentiable design integrating modular tasks, i.e. perception, prediction and planing, which enables optimization in pursuit of the ultimate goal. Despite the great potential of the end-to-end paradigm, existing methods suffer from several aspects including expensive BEV (bird's eye view) computation, action diversity, and sub-optimal decision in complex real-world scenarios. To address these challenges, we propose a novel hybrid sparse-dense diffusion policy, empowered by a Vision-Language Model (VLM), called Diff-VLA. We explore the sparse diffusion representation for efficient multi-modal driving behavior. Moreover, we rethink the effectiveness of VLM driving decision and improve the trajectory generation guidance through deep interaction across agent, map instances and VLM output. Our method shows superior performance in Autonomous Grand Challenge 2025 which contains challenging real and reactive synthetic scenarios. Our methods achieves 45.0 PDMS.
SparseMeXT Unlocking the Potential of Sparse Representations for HD Map Construction
May 12, 2025Recent advancements in high-definition \emph{HD} map construction have demonstrated the effectiveness of dense representations, which heavily rely on computationally intensive bird's-eye view \emph{BEV} features. While sparse representations offer a more efficient alternative by avoiding dense BEV processing, existing methods often lag behind due to the lack of tailored designs. These limitations have hindered the competitiveness of sparse representations in online HD map construction. In this work, we systematically revisit and enhance sparse representation techniques, identifying key architectural and algorithmic improvements that bridge the gap with--and ultimately surpass--dense approaches. We introduce a dedicated network architecture optimized for sparse map feature extraction, a sparse-dense segmentation auxiliary task to better leverage geometric and semantic cues, and a denoising module guided by physical priors to refine predictions. Through these enhancements, our method achieves state-of-the-art performance on the nuScenes dataset, significantly advancing HD map construction and centerline detection. Specifically, SparseMeXt-Tiny reaches a mean average precision \emph{mAP} of 55.5% at 32 frames per second \emph{fps}, while SparseMeXt-Base attains 65.2% mAP. Scaling the backbone and decoder further, SparseMeXt-Large achieves an mAP of 68.9% at over 20 fps, establishing a new benchmark for sparse representations in HD map construction. These results underscore the untapped potential of sparse methods, challenging the conventional reliance on dense representations and redefining efficiency-performance trade-offs in the field.
Inference-to-complete: A High-performance and Programmable Data-plane Co-processor for Neural-network-driven Traffic Analysis
Nov 01, 2024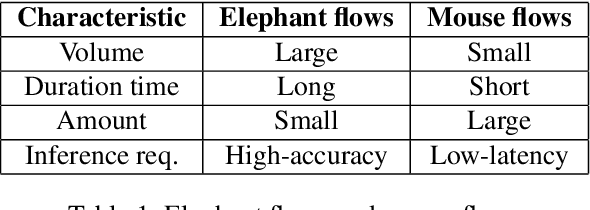
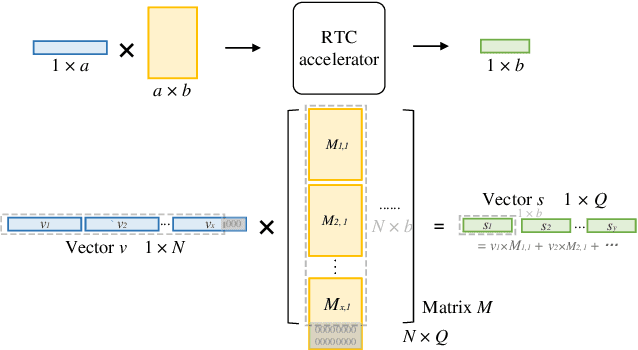
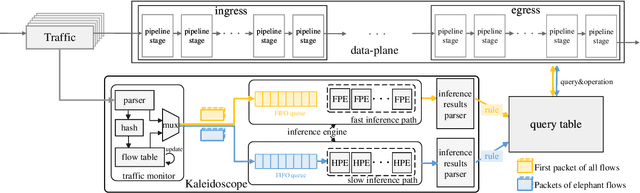
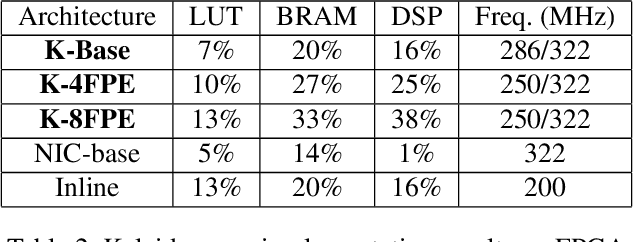
Neural-networks-driven intelligent data-plane (NN-driven IDP) is becoming an emerging topic for excellent accuracy and high performance. Meanwhile we argue that NN-driven IDP should satisfy three design goals: the flexibility to support various NNs models, the low-latency-high-throughput inference performance, and the data-plane-unawareness harming no performance and functionality. Unfortunately, existing work either over-modify NNs for IDP, or insert inline pipelined accelerators into the data-plane, failing to meet the flexibility and unawareness goals. In this paper, we propose Kaleidoscope, a flexible and high-performance co-processor located at the bypass of the data-plane. To address the challenge of meeting three design goals, three key techniques are presented. The programmable run-to-completion accelerators are developed for flexible inference. To further improve performance, we design a scalable inference engine which completes low-latency and low-cost inference for the mouse flows, and perform complex NNs with high-accuracy for the elephant flows. Finally, raw-bytes-based NNs are introduced, which help to achieve unawareness. We prototype Kaleidoscope on both FPGA and ASIC library. In evaluation on six NNs models, Kaleidoscope reaches 256-352 ns inference latency and 100 Gbps throughput with negligible influence on the data-plane. The on-board tested NNs perform state-of-the-art accuracy among other NN-driven IDP, exhibiting the the significant impact of flexibility on enhancing traffic analysis accuracy.
SocialFormer: Social Interaction Modeling with Edge-enhanced Heterogeneous Graph Transformers for Trajectory Prediction
May 06, 2024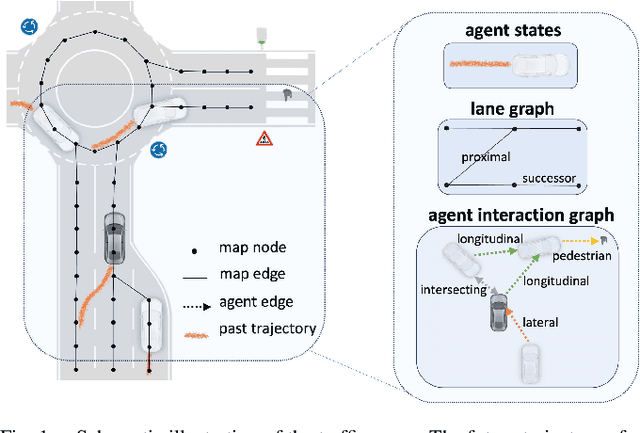
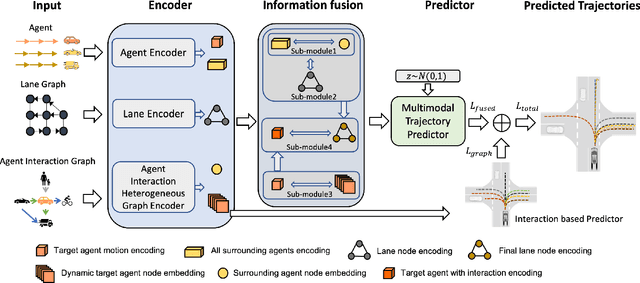
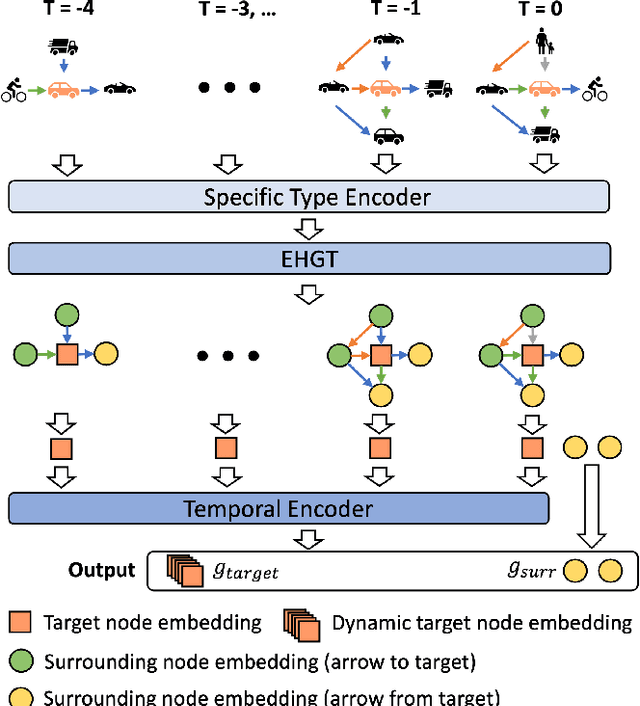
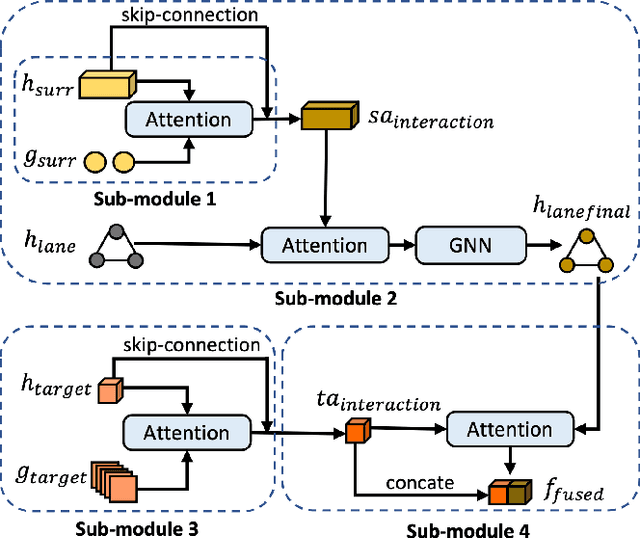
Accurate trajectory prediction is crucial for ensuring safe and efficient autonomous driving. However, most existing methods overlook complex interactions between traffic participants that often govern their future trajectories. In this paper, we propose SocialFormer, an agent interaction-aware trajectory prediction method that leverages the semantic relationship between the target vehicle and surrounding vehicles by making use of the road topology. We also introduce an edge-enhanced heterogeneous graph transformer (EHGT) as the aggregator in a graph neural network (GNN) to encode the semantic and spatial agent interaction information. Additionally, we introduce a temporal encoder based on gated recurrent units (GRU) to model the temporal social behavior of agent movements. Finally, we present an information fusion framework that integrates agent encoding, lane encoding, and agent interaction encoding for a holistic representation of the traffic scene. We evaluate SocialFormer for the trajectory prediction task on the popular nuScenes benchmark and achieve state-of-the-art performance.
SemanticFormer: Holistic and Semantic Traffic Scene Representation for Trajectory Prediction using Knowledge Graphs
Apr 30, 2024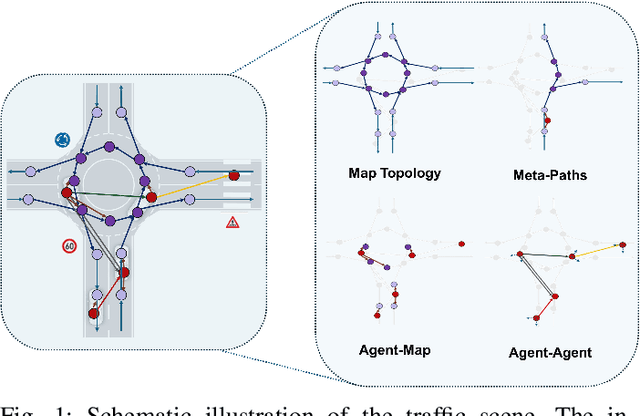
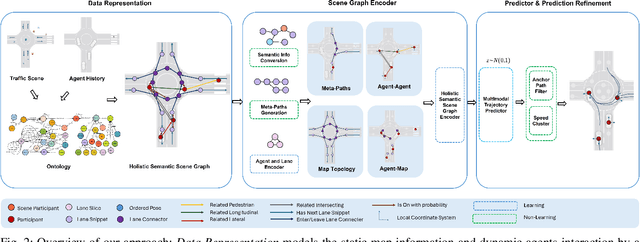
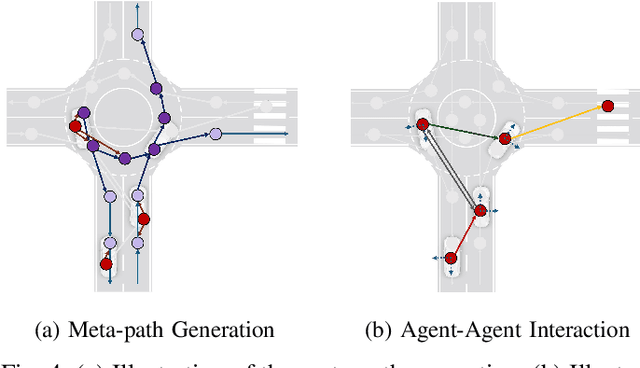
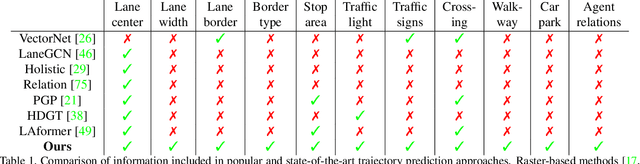
Trajectory prediction in autonomous driving relies on accurate representation of all relevant contexts of the driving scene including traffic participants, road topology, traffic signs as well as their semantic relations to each other. Despite increased attention to this issue, most approaches in trajectory prediction do not consider all of these factors sufficiently. This paper describes a method SemanticFormer to predict multimodal trajectories by reasoning over a semantic traffic scene graph using a hybrid approach. We extract high-level information in the form of semantic meta-paths from a knowledge graph which is then processed by a novel pipeline based on multiple attention mechanisms to predict accurate trajectories. The proposed architecture comprises a hierarchical heterogeneous graph encoder, which can capture spatio-temporal and relational information across agents and between agents and road elements, and a predictor that fuses the different encodings and decodes trajectories with probabilities. Finally, a refinement module evaluates permitted meta-paths of trajectories and speed profiles to obtain final predicted trajectories. Evaluation of the nuScenes benchmark demonstrates improved performance compared to the state-of-the-art methods.
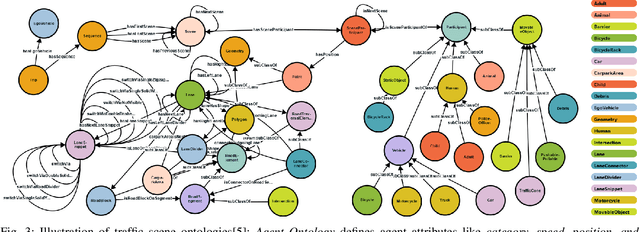
nuScenes Knowledge Graph -- A comprehensive semantic representation of traffic scenes for trajectory prediction
Dec 15, 2023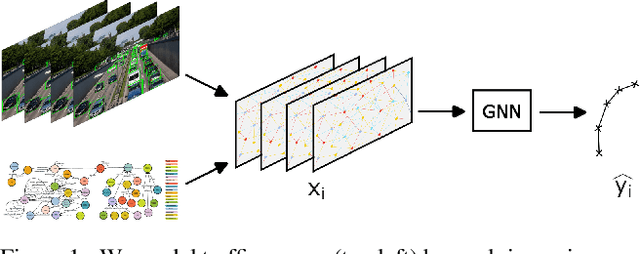
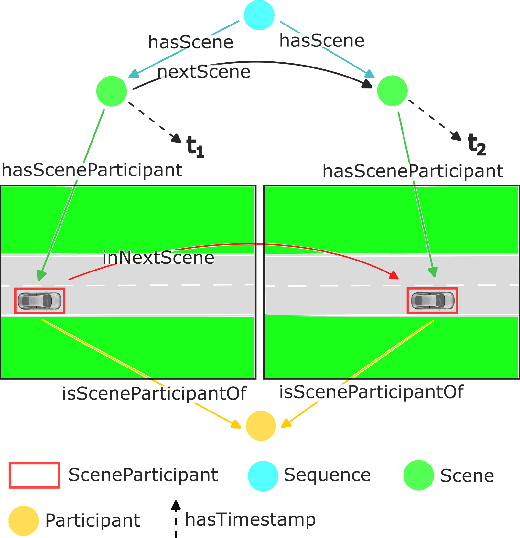
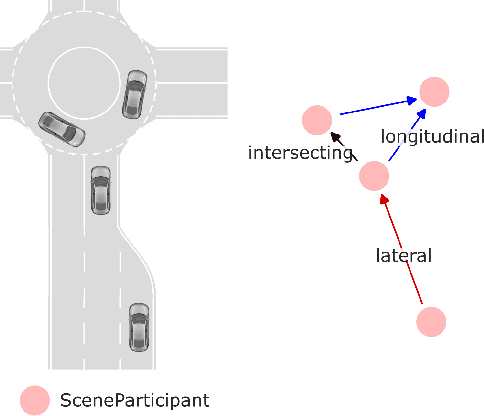
Trajectory prediction in traffic scenes involves accurately forecasting the behaviour of surrounding vehicles. To achieve this objective it is crucial to consider contextual information, including the driving path of vehicles, road topology, lane dividers, and traffic rules. Although studies demonstrated the potential of leveraging heterogeneous context for improving trajectory prediction, state-of-the-art deep learning approaches still rely on a limited subset of this information. This is mainly due to the limited availability of comprehensive representations. This paper presents an approach that utilizes knowledge graphs to model the diverse entities and their semantic connections within traffic scenes. Further, we present nuScenes Knowledge Graph (nSKG), a knowledge graph for the nuScenes dataset, that models explicitly all scene participants and road elements, as well as their semantic and spatial relationships. To facilitate the usage of the nSKG via graph neural networks for trajectory prediction, we provide the data in a format, ready-to-use by the PyG library. All artefacts can be found here: https://github.com/boschresearch/nuScenes_Knowledge_Graph