 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSocialFormer: Social Interaction Modeling with Edge-enhanced Heterogeneous Graph Transformers for Trajectory Prediction
Paper and Code
May 06, 2024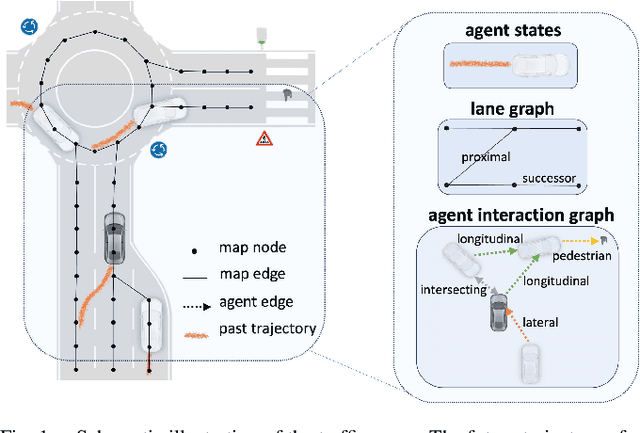
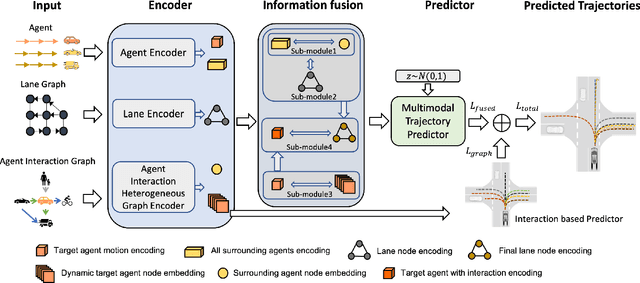
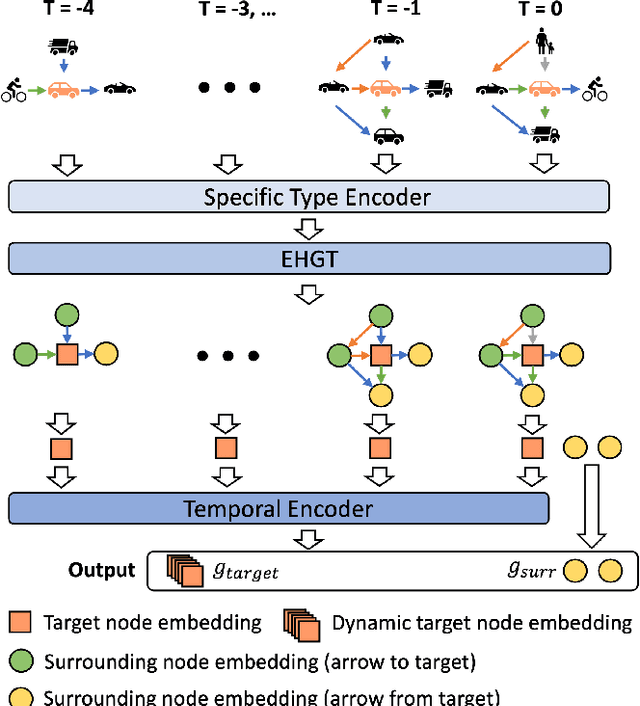
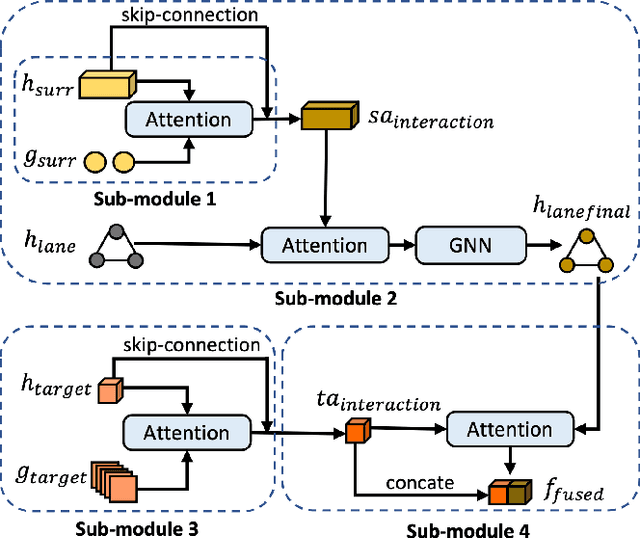
Accurate trajectory prediction is crucial for ensuring safe and efficient autonomous driving. However, most existing methods overlook complex interactions between traffic participants that often govern their future trajectories. In this paper, we propose SocialFormer, an agent interaction-aware trajectory prediction method that leverages the semantic relationship between the target vehicle and surrounding vehicles by making use of the road topology. We also introduce an edge-enhanced heterogeneous graph transformer (EHGT) as the aggregator in a graph neural network (GNN) to encode the semantic and spatial agent interaction information. Additionally, we introduce a temporal encoder based on gated recurrent units (GRU) to model the temporal social behavior of agent movements. Finally, we present an information fusion framework that integrates agent encoding, lane encoding, and agent interaction encoding for a holistic representation of the traffic scene. We evaluate SocialFormer for the trajectory prediction task on the popular nuScenes benchmark and achieve state-of-the-art performance.