 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCausalMan: A physics-based simulator for large-scale causality
Feb 18, 2025A comprehensive understanding of causality is critical for navigating and operating within today's complex real-world systems. The absence of realistic causal models with known data generating processes complicates fair benchmarking. In this paper, we present the CausalMan simulator, modeled after a real-world production line. The simulator features a diverse range of linear and non-linear mechanisms and challenging-to-predict behaviors, such as discrete mode changes. We demonstrate the inadequacy of many state-of-the-art approaches and analyze the significant differences in their performance and tractability, both in terms of runtime and memory complexity. As a contribution, we will release the CausalMan large-scale simulator. We present two derived datasets, and perform an extensive evaluation of both.
SocialFormer: Social Interaction Modeling with Edge-enhanced Heterogeneous Graph Transformers for Trajectory Prediction
May 06, 2024Accurate trajectory prediction is crucial for ensuring safe and efficient autonomous driving. However, most existing methods overlook complex interactions between traffic participants that often govern their future trajectories. In this paper, we propose SocialFormer, an agent interaction-aware trajectory prediction method that leverages the semantic relationship between the target vehicle and surrounding vehicles by making use of the road topology. We also introduce an edge-enhanced heterogeneous graph transformer (EHGT) as the aggregator in a graph neural network (GNN) to encode the semantic and spatial agent interaction information. Additionally, we introduce a temporal encoder based on gated recurrent units (GRU) to model the temporal social behavior of agent movements. Finally, we present an information fusion framework that integrates agent encoding, lane encoding, and agent interaction encoding for a holistic representation of the traffic scene. We evaluate SocialFormer for the trajectory prediction task on the popular nuScenes benchmark and achieve state-of-the-art performance.
SemanticFormer: Holistic and Semantic Traffic Scene Representation for Trajectory Prediction using Knowledge Graphs
Apr 30, 2024Trajectory prediction in autonomous driving relies on accurate representation of all relevant contexts of the driving scene including traffic participants, road topology, traffic signs as well as their semantic relations to each other. Despite increased attention to this issue, most approaches in trajectory prediction do not consider all of these factors sufficiently. This paper describes a method SemanticFormer to predict multimodal trajectories by reasoning over a semantic traffic scene graph using a hybrid approach. We extract high-level information in the form of semantic meta-paths from a knowledge graph which is then processed by a novel pipeline based on multiple attention mechanisms to predict accurate trajectories. The proposed architecture comprises a hierarchical heterogeneous graph encoder, which can capture spatio-temporal and relational information across agents and between agents and road elements, and a predictor that fuses the different encodings and decodes trajectories with probabilities. Finally, a refinement module evaluates permitted meta-paths of trajectories and speed profiles to obtain final predicted trajectories. Evaluation of the nuScenes benchmark demonstrates improved performance compared to the state-of-the-art methods.
nuScenes Knowledge Graph -- A comprehensive semantic representation of traffic scenes for trajectory prediction
Dec 15, 2023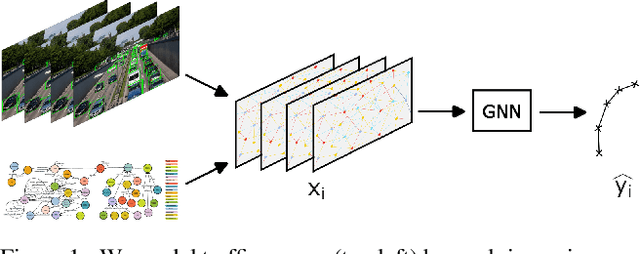
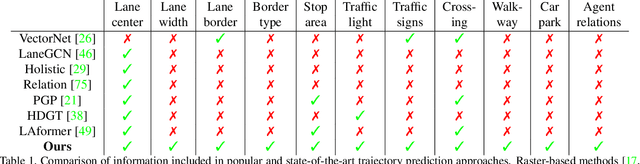
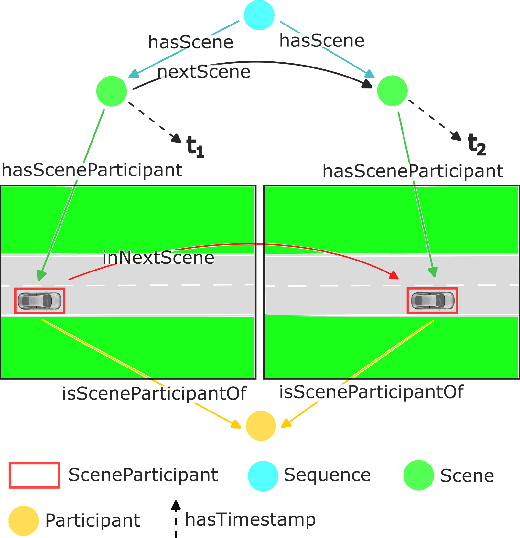
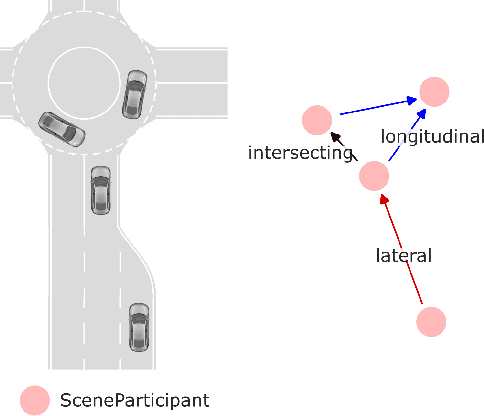
Trajectory prediction in traffic scenes involves accurately forecasting the behaviour of surrounding vehicles. To achieve this objective it is crucial to consider contextual information, including the driving path of vehicles, road topology, lane dividers, and traffic rules. Although studies demonstrated the potential of leveraging heterogeneous context for improving trajectory prediction, state-of-the-art deep learning approaches still rely on a limited subset of this information. This is mainly due to the limited availability of comprehensive representations. This paper presents an approach that utilizes knowledge graphs to model the diverse entities and their semantic connections within traffic scenes. Further, we present nuScenes Knowledge Graph (nSKG), a knowledge graph for the nuScenes dataset, that models explicitly all scene participants and road elements, as well as their semantic and spatial relationships. To facilitate the usage of the nSKG via graph neural networks for trajectory prediction, we provide the data in a format, ready-to-use by the PyG library. All artefacts can be found here: https://github.com/boschresearch/nuScenes_Knowledge_Graph
Relation-based Motion Prediction using Traffic Scene Graphs
Nov 24, 2022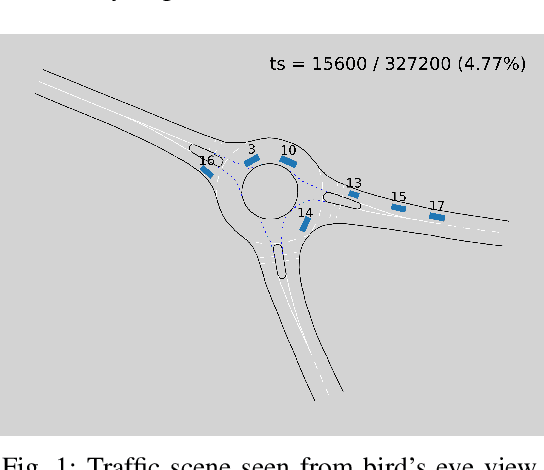
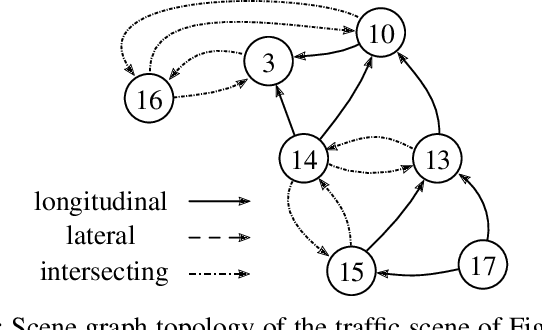
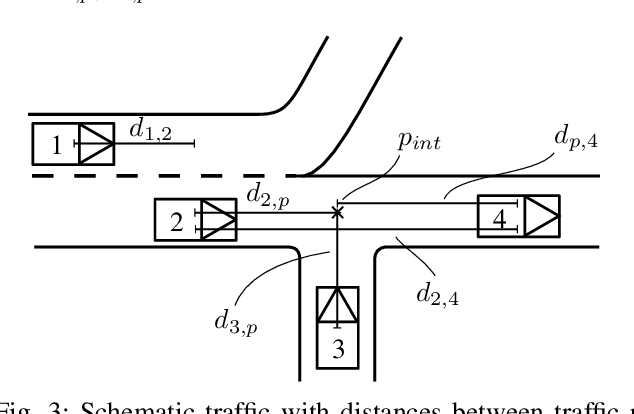
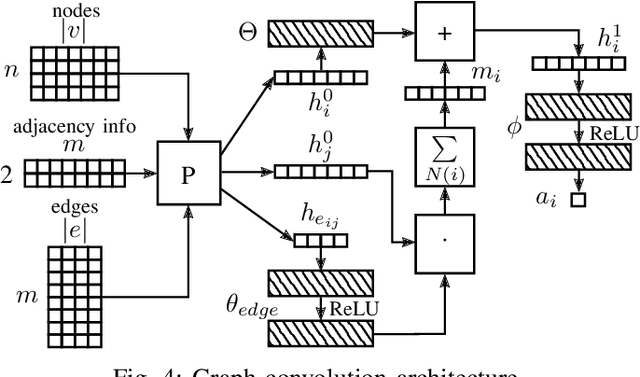
Representing relevant information of a traffic scene and understanding its environment is crucial for the success of autonomous driving. Modeling the surrounding of an autonomous car using semantic relations, i.e., how different traffic participants relate in the context of traffic rule based behaviors, is hardly been considered in previous work. This stems from the fact that these relations are hard to extract from real-world traffic scenes. In this work, we model traffic scenes in a form of spatial semantic scene graphs for various different predictions about the traffic participants, e.g., acceleration and deceleration. Our learning and inference approach uses Graph Neural Networks (GNNs) and shows that incorporating explicit information about the spatial semantic relations between traffic participants improves the predicdtion results. Specifically, the acceleration prediction of traffic participants is improved by up to 12% compared to the baselines, which do not exploit this explicit information. Furthermore, by including additional information about previous scenes, we achieve 73% improvements.