 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgenuScenes Knowledge Graph -- A comprehensive semantic representation of traffic scenes for trajectory prediction
Dec 15, 2023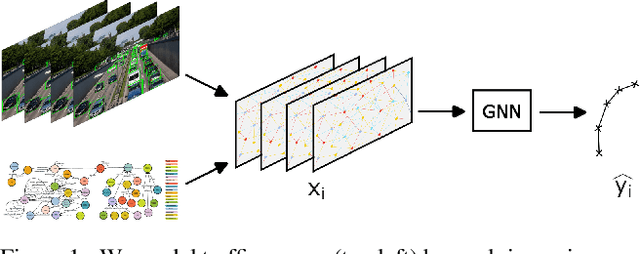
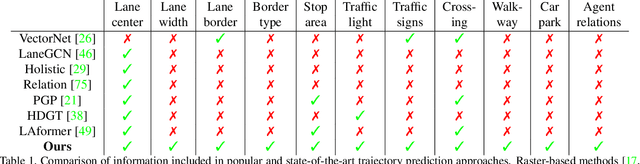
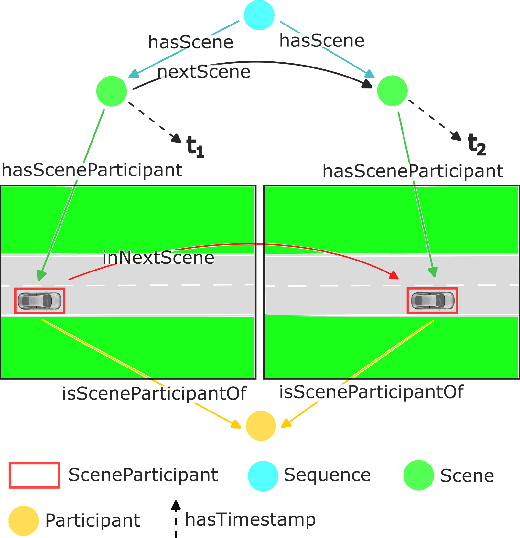
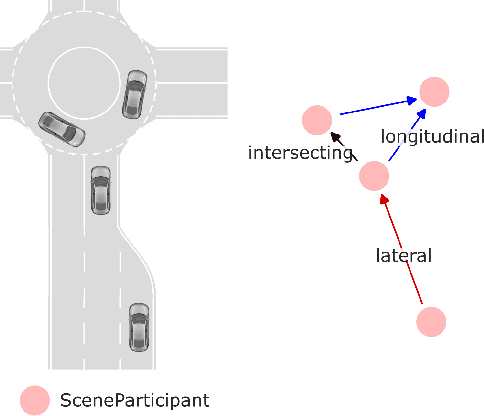
Trajectory prediction in traffic scenes involves accurately forecasting the behaviour of surrounding vehicles. To achieve this objective it is crucial to consider contextual information, including the driving path of vehicles, road topology, lane dividers, and traffic rules. Although studies demonstrated the potential of leveraging heterogeneous context for improving trajectory prediction, state-of-the-art deep learning approaches still rely on a limited subset of this information. This is mainly due to the limited availability of comprehensive representations. This paper presents an approach that utilizes knowledge graphs to model the diverse entities and their semantic connections within traffic scenes. Further, we present nuScenes Knowledge Graph (nSKG), a knowledge graph for the nuScenes dataset, that models explicitly all scene participants and road elements, as well as their semantic and spatial relationships. To facilitate the usage of the nSKG via graph neural networks for trajectory prediction, we provide the data in a format, ready-to-use by the PyG library. All artefacts can be found here: https://github.com/boschresearch/nuScenes_Knowledge_Graph
IPCC-TP: Utilizing Incremental Pearson Correlation Coefficient for Joint Multi-Agent Trajectory Prediction
Mar 16, 2023Reliable multi-agent trajectory prediction is crucial for the safe planning and control of autonomous systems. Compared with single-agent cases, the major challenge in simultaneously processing multiple agents lies in modeling complex social interactions caused by various driving intentions and road conditions. Previous methods typically leverage graph-based message propagation or attention mechanism to encapsulate such interactions in the format of marginal probabilistic distributions. However, it is inherently sub-optimal. In this paper, we propose IPCC-TP, a novel relevance-aware module based on Incremental Pearson Correlation Coefficient to improve multi-agent interaction modeling. IPCC-TP learns pairwise joint Gaussian Distributions through the tightly-coupled estimation of the means and covariances according to interactive incremental movements. Our module can be conveniently embedded into existing multi-agent prediction methods to extend original motion distribution decoders. Extensive experiments on nuScenes and Argoverse 2 datasets demonstrate that IPCC-TP improves the performance of baselines by a large margin.