 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInfiCoEvalChain: A Blockchain-Based Decentralized Framework for Collaborative LLM Evaluation
Feb 09, 2026The rapid advancement of large language models (LLMs) demands increasingly reliable evaluation, yet current centralized evaluation suffers from opacity, overfitting, and hardware-induced variance. Our empirical analysis reveals an alarming inconsistency in existing evaluations: the standard deviation across ten repeated runs of a single model on HumanEval (1.67) actually exceeds the performance gap among the top-10 models on the official leaderboard (0.91), rendering current rankings statistically precarious. To mitigate these instabilities, we propose a decentralized evaluation framework that enables hardware and parameter diversity through large-scale benchmarking across heterogeneous compute nodes. By leveraging the blockchain-based protocol, the framework incentivizes global contributors to act as independent validators, using a robust reward system to ensure evaluation integrity and discourage dishonest participation. This collective verification transforms evaluation from a "centralized black box" into a "decentralized endorsement" where multi-party consensus and diverse inference environments yield a more stable, representative metric. Experimental results demonstrate that the decentralized evaluation framework reduces the standard deviation across ten runs on the same model to 0.28. This significant improvement over conventional frameworks ensures higher statistical confidence in model rankings. We have completely implemented this platform and will soon release it to the community.
MergePipe: A Budget-Aware Parameter Management System for Scalable LLM Merging
Feb 05, 2026Large language model (LLM) merging has become a key technique in modern LLM development pipelines, enabling the integration of multiple task- or domain-specific expert models without retraining. However, as the number of experts grows, existing merging implementations treat model parameters as unstructured files and execute merges in a stateless, one-shot manner, leading to excessive disk I/O, redundant parameter scans, and poor scalability. In this paper, we present \textbf{MergePipe}, a parameter management system for scalable LLM merging. MergePipe is the first system that treats LLM merging as a data management and execution problem, and introduces a catalog-driven abstraction over model parameters, merge plans, and execution lineage. At its core, MergePipe employs a cost-aware planner that explicitly models expert parameter I/O and enforces user-specified I/O budgets, followed by a streaming execution engine that materializes merged models under transactional guarantees. Our key insight is that while base model reads and output writes are unavoidable, expert parameter reads dominate merge cost and constitute the primary optimization target. By making expert access budget-aware throughout planning and execution, MergePipe mitigates the $O(K)$ I/O growth of naive pipelines and achieves predictable scaling behavior. Experiments show that MergePipe reduces total I/O by up to an order of magnitude and delivers up to $11\times$ end-to-end speedups (up to 90\% wall-time reduction) over state-of-the-art LLM merging pipelines.
InfiFPO: Implicit Model Fusion via Preference Optimization in Large Language Models
May 20, 2025Model fusion combines multiple Large Language Models (LLMs) with different strengths into a more powerful, integrated model through lightweight training methods. Existing works on model fusion focus primarily on supervised fine-tuning (SFT), leaving preference alignment (PA) --a critical phase for enhancing LLM performance--largely unexplored. The current few fusion methods on PA phase, like WRPO, simplify the process by utilizing only response outputs from source models while discarding their probability information. To address this limitation, we propose InfiFPO, a preference optimization method for implicit model fusion. InfiFPO replaces the reference model in Direct Preference Optimization (DPO) with a fused source model that synthesizes multi-source probabilities at the sequence level, circumventing complex vocabulary alignment challenges in previous works and meanwhile maintaining the probability information. By introducing probability clipping and max-margin fusion strategies, InfiFPO enables the pivot model to align with human preferences while effectively distilling knowledge from source models. Comprehensive experiments on 11 widely-used benchmarks demonstrate that InfiFPO consistently outperforms existing model fusion and preference optimization methods. When using Phi-4 as the pivot model, InfiFPO improve its average performance from 79.95 to 83.33 on 11 benchmarks, significantly improving its capabilities in mathematics, coding, and reasoning tasks.
InfiGFusion: Graph-on-Logits Distillation via Efficient Gromov-Wasserstein for Model Fusion
May 20, 2025



Recent advances in large language models (LLMs) have intensified efforts to fuse heterogeneous open-source models into a unified system that inherits their complementary strengths. Existing logit-based fusion methods maintain inference efficiency but treat vocabulary dimensions independently, overlooking semantic dependencies encoded by cross-dimension interactions. These dependencies reflect how token types interact under a model's internal reasoning and are essential for aligning models with diverse generation behaviors. To explicitly model these dependencies, we propose \textbf{InfiGFusion}, the first structure-aware fusion framework with a novel \textit{Graph-on-Logits Distillation} (GLD) loss. Specifically, we retain the top-$k$ logits per output and aggregate their outer products across sequence positions to form a global co-activation graph, where nodes represent vocabulary channels and edges quantify their joint activations. To ensure scalability and efficiency, we design a sorting-based closed-form approximation that reduces the original $O(n^4)$ cost of Gromov-Wasserstein distance to $O(n \log n)$, with provable approximation guarantees. Experiments across multiple fusion settings show that GLD consistently improves fusion quality and stability. InfiGFusion outperforms SOTA models and fusion baselines across 11 benchmarks spanning reasoning, coding, and mathematics. It shows particular strength in complex reasoning tasks, with +35.6 improvement on Multistep Arithmetic and +37.06 on Causal Judgement over SFT, demonstrating superior multi-step and relational inference.
Interdependency Matters: Graph Alignment for Multivariate Time Series Anomaly Detection
Oct 11, 2024


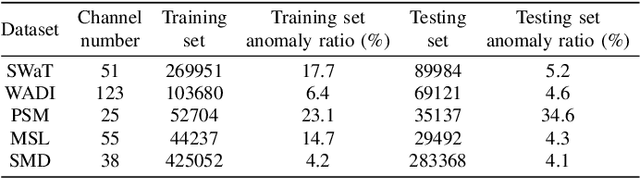
Anomaly detection in multivariate time series (MTS) is crucial for various applications in data mining and industry. Current industrial methods typically approach anomaly detection as an unsupervised learning task, aiming to identify deviations by estimating the normal distribution in noisy, label-free datasets. These methods increasingly incorporate interdependencies between channels through graph structures to enhance accuracy. However, the role of interdependencies is more critical than previously understood, as shifts in interdependencies between MTS channels from normal to anomalous data are significant. This observation suggests that \textit{anomalies could be detected by changes in these interdependency graph series}. To capitalize on this insight, we introduce MADGA (MTS Anomaly Detection via Graph Alignment), which redefines anomaly detection as a graph alignment (GA) problem that explicitly utilizes interdependencies for anomaly detection. MADGA dynamically transforms subsequences into graphs to capture the evolving interdependencies, and Graph alignment is performed between these graphs, optimizing an alignment plan that minimizes cost, effectively minimizing the distance for normal data and maximizing it for anomalous data. Uniquely, our GA approach involves explicit alignment of both nodes and edges, employing Wasserstein distance for nodes and Gromov-Wasserstein distance for edges. To our knowledge, this is the first application of GA to MTS anomaly detection that explicitly leverages interdependency for this purpose. Extensive experiments on diverse real-world datasets validate the effectiveness of MADGA, demonstrating its capability to detect anomalies and differentiate interdependencies, consistently achieving state-of-the-art across various scenarios.
Understanding and Guiding Weakly Supervised Entity Alignment with Potential Isomorphism Propagation
Feb 05, 2024



Weakly Supervised Entity Alignment (EA) is the task of identifying equivalent entities across diverse knowledge graphs (KGs) using only a limited number of seed alignments. Despite substantial advances in aggregation-based weakly supervised EA, the underlying mechanisms in this setting remain unexplored. In this paper, we present a propagation perspective to analyze weakly supervised EA and explain the existing aggregation-based EA models. Our theoretical analysis reveals that these models essentially seek propagation operators for pairwise entity similarities. We further prove that, despite the structural heterogeneity of different KGs, the potentially aligned entities within aggregation-based EA models have isomorphic subgraphs, which is the core premise of EA but has not been investigated. Leveraging this insight, we introduce a potential isomorphism propagation operator to enhance the propagation of neighborhood information across KGs. We develop a general EA framework, PipEA, incorporating this operator to improve the accuracy of every type of aggregation-based model without altering the learning process. Extensive experiments substantiate our theoretical findings and demonstrate PipEA's significant performance gains over state-of-the-art weakly supervised EA methods. Our work not only advances the field but also enhances our comprehension of aggregation-based weakly supervised EA.
Towards Semantic Consistency: Dirichlet Energy Driven Robust Multi-Modal Entity Alignment
Jan 31, 2024



In Multi-Modal Knowledge Graphs (MMKGs), Multi-Modal Entity Alignment (MMEA) is crucial for identifying identical entities across diverse modal attributes. However, semantic inconsistency, mainly due to missing modal attributes, poses a significant challenge. Traditional approaches rely on attribute interpolation, but this often introduces modality noise, distorting the original semantics. Moreover, the lack of a universal theoretical framework limits advancements in achieving semantic consistency. This study introduces a novel approach, DESAlign, which addresses these issues by applying a theoretical framework based on Dirichlet energy to ensure semantic consistency. We discover that semantic inconsistency leads to model overfitting to modality noise, causing performance fluctuations, particularly when modalities are missing. DESAlign innovatively combats over-smoothing and interpolates absent semantics using existing modalities. Our approach includes a multi-modal knowledge graph learning strategy and a propagation technique that employs existing semantic features to compensate for missing ones, providing explicit Euler solutions. Comprehensive evaluations across 18 benchmarks, including monolingual and bilingual scenarios, demonstrate that DESAlign surpasses existing methods, setting a new standard in performance. Further testing on 42 benchmarks with high rates of missing modalities confirms its robustness, offering an effective solution to semantic inconsistency in real-world MMKGs.
Gradient Flow of Energy: A General and Efficient Approach for Entity Alignment Decoding
Jan 23, 2024



Entity alignment (EA), a pivotal process in integrating multi-source Knowledge Graphs (KGs), seeks to identify equivalent entity pairs across these graphs. Most existing approaches regard EA as a graph representation learning task, concentrating on enhancing graph encoders. However, the decoding process in EA - essential for effective operation and alignment accuracy - has received limited attention and remains tailored to specific datasets and model architectures, necessitating both entity and additional explicit relation embeddings. This specificity limits its applicability, particularly in GNN-based models. To address this gap, we introduce a novel, generalized, and efficient decoding approach for EA, relying solely on entity embeddings. Our method optimizes the decoding process by minimizing Dirichlet energy, leading to the gradient flow within the graph, to promote graph homophily. The discretization of the gradient flow produces a fast and scalable approach, termed Triple Feature Propagation (TFP). TFP innovatively channels gradient flow through three views: entity-to-entity, entity-to-relation, and relation-to-entity. This generalized gradient flow enables TFP to harness the multi-view structural information of KGs. Rigorous experimentation on diverse real-world datasets demonstrates that our approach significantly enhances various EA methods. Notably, the approach achieves these advancements with less than 6 seconds of additional computational time, establishing a new benchmark in efficiency and adaptability for future EA methods.
TIMS: A Tactile Internet-Based Micromanipulation System with Haptic Guidance for Surgical Training
Mar 07, 2023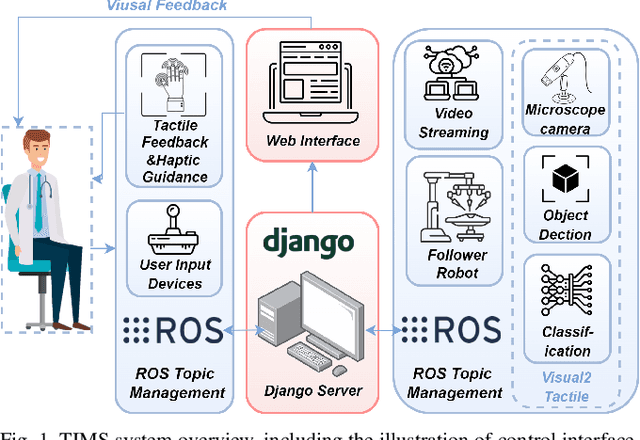
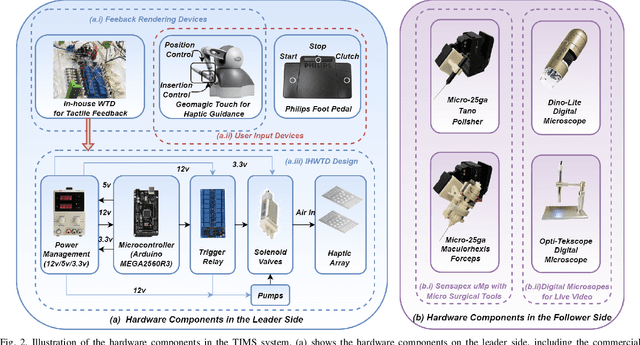
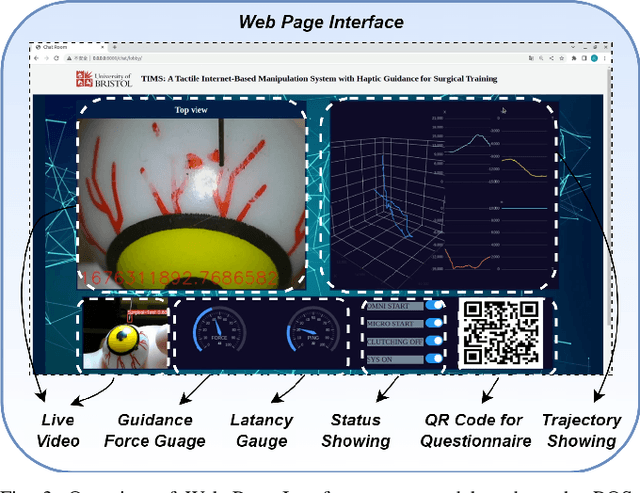
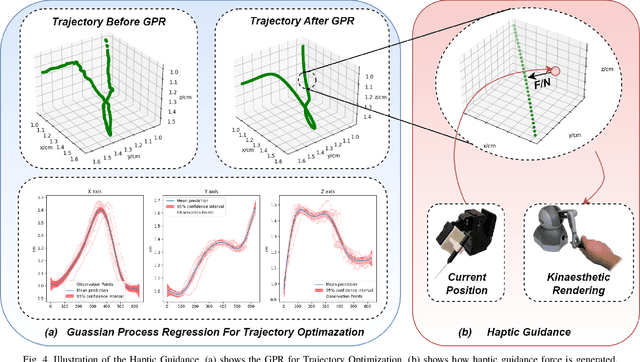
Microsurgery involves the dexterous manipulation of delicate tissue or fragile structures such as small blood vessels, nerves, etc., under a microscope. To address the limitation of imprecise manipulation of human hands, robotic systems have been developed to assist surgeons in performing complex microsurgical tasks with greater precision and safety. However, the steep learning curve for robot-assisted microsurgery (RAMS) and the shortage of well-trained surgeons pose significant challenges to the widespread adoption of RAMS. Therefore, the development of a versatile training system for RAMS is necessary, which can bring tangible benefits to both surgeons and patients. In this paper, we present a Tactile Internet-Based Micromanipulation System (TIMS) based on a ROS-Django web-based architecture for microsurgical training. This system can provide tactile feedback to operators via a wearable tactile display (WTD), while real-time data is transmitted through the internet via a ROS-Django framework. In addition, TIMS integrates haptic guidance to `guide' the trainees to follow a desired trajectory provided by expert surgeons. Learning from demonstration based on Gaussian Process Regression (GPR) was used to generate the desired trajectory. User studies were also conducted to verify the effectiveness of our proposed TIMS, comparing users' performance with and without tactile feedback and/or haptic guidance.