 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSHIELD: Multi-task Multi-distribution Vehicle Routing Solver with Sparsity and Hierarchy
Jun 11, 2025Recent advances toward foundation models for routing problems have shown great potential of a unified deep model for various VRP variants. However, they overlook the complex real-world customer distributions. In this work, we advance the Multi-Task VRP (MTVRP) setting to the more realistic yet challenging Multi-Task Multi-Distribution VRP (MTMDVRP) setting, and introduce SHIELD, a novel model that leverages both sparsity and hierarchy principles. Building on a deeper decoder architecture, we first incorporate the Mixture-of-Depths (MoD) technique to enforce sparsity. This improves both efficiency and generalization by allowing the model to dynamically select nodes to use or skip each decoder layer, providing the needed capacity to adaptively allocate computation for learning the task/distribution specific and shared representations. We also develop a context-based clustering layer that exploits the presence of hierarchical structures in the problems to produce better local representations. These two designs inductively bias the network to identify key features that are common across tasks and distributions, leading to significantly improved generalization on unseen ones. Our empirical results demonstrate the superiority of our approach over existing methods on 9 real-world maps with 16 VRP variants each.
Hierarchical Neural Constructive Solver for Real-world TSP Scenarios
Aug 07, 2024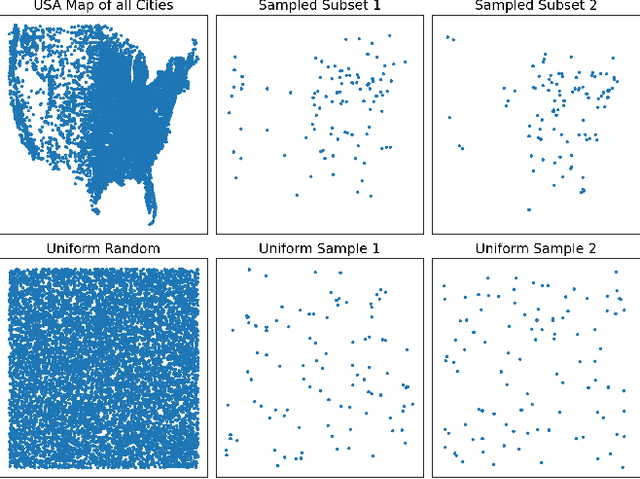
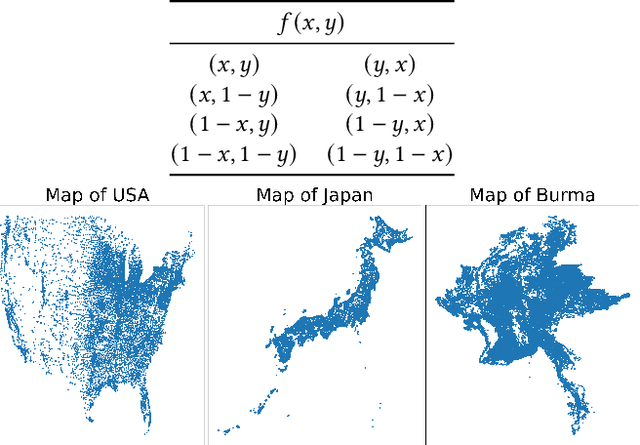
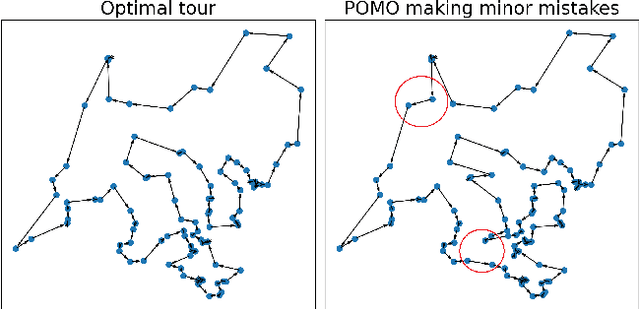
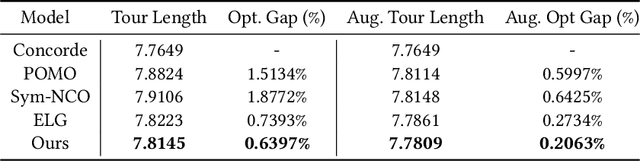
Existing neural constructive solvers for routing problems have predominantly employed transformer architectures, conceptualizing the route construction as a set-to-sequence learning task. However, their efficacy has primarily been demonstrated on entirely random problem instances that inadequately capture real-world scenarios. In this paper, we introduce realistic Traveling Salesman Problem (TSP) scenarios relevant to industrial settings and derive the following insights: (1) The optimal next node (or city) to visit often lies within proximity to the current node, suggesting the potential benefits of biasing choices based on current locations. (2) Effectively solving the TSP requires robust tracking of unvisited nodes and warrants succinct grouping strategies. Building upon these insights, we propose integrating a learnable choice layer inspired by Hypernetworks to prioritize choices based on the current location, and a learnable approximate clustering algorithm inspired by the Expectation-Maximization algorithm to facilitate grouping the unvisited cities. Together, these two contributions form a hierarchical approach towards solving the realistic TSP by considering both immediate local neighbourhoods and learning an intermediate set of node representations. Our hierarchical approach yields superior performance compared to both classical and recent transformer models, showcasing the efficacy of the key designs.
Differentiable Cluster Graph Neural Network
May 25, 2024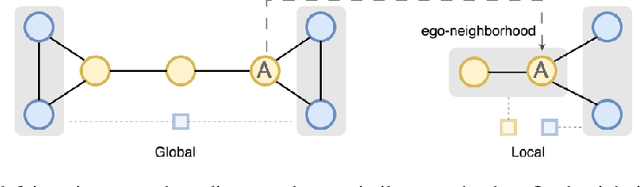



Graph Neural Networks often struggle with long-range information propagation and in the presence of heterophilous neighborhoods. We address both challenges with a unified framework that incorporates a clustering inductive bias into the message passing mechanism, using additional cluster-nodes. Central to our approach is the formulation of an optimal transport based implicit clustering objective function. However, the algorithm for solving the implicit objective function needs to be differentiable to enable end-to-end learning of the GNN. To facilitate this, we adopt an entropy regularized objective function and propose an iterative optimization process, alternating between solving for the cluster assignments and updating the node/cluster-node embeddings. Notably, our derived closed-form optimization steps are themselves simple yet elegant message passing steps operating seamlessly on a bipartite graph of nodes and cluster-nodes. Our clustering-based approach can effectively capture both local and global information, demonstrated by extensive experiments on both heterophilous and homophilous datasets.
Constrained Layout Generation with Factor Graphs
Mar 30, 2024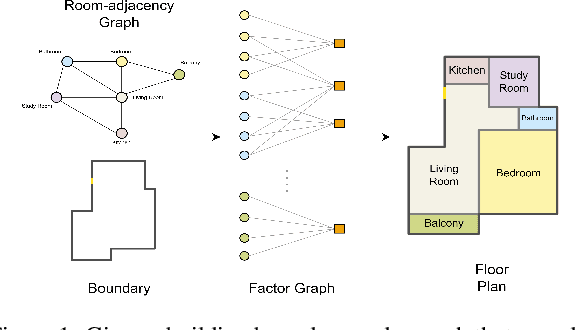

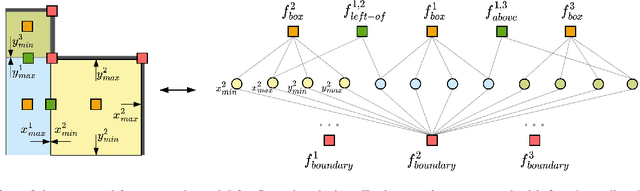
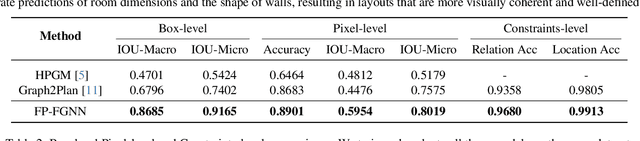
This paper addresses the challenge of object-centric layout generation under spatial constraints, seen in multiple domains including floorplan design process. The design process typically involves specifying a set of spatial constraints that include object attributes like size and inter-object relations such as relative positioning. Existing works, which typically represent objects as single nodes, lack the granularity to accurately model complex interactions between objects. For instance, often only certain parts of an object, like a room's right wall, interact with adjacent objects. To address this gap, we introduce a factor graph based approach with four latent variable nodes for each room, and a factor node for each constraint. The factor nodes represent dependencies among the variables to which they are connected, effectively capturing constraints that are potentially of a higher order. We then develop message-passing on the bipartite graph, forming a factor graph neural network that is trained to produce a floorplan that aligns with the desired requirements. Our approach is simple and generates layouts faithful to the user requirements, demonstrated by a large improvement in IOU scores over existing methods. Additionally, our approach, being inferential and accurate, is well-suited to the practical human-in-the-loop design process where specifications evolve iteratively, offering a practical and powerful tool for AI-guided design.
Joint Triplet Loss Learning for Next New POI Recommendation
Sep 25, 2022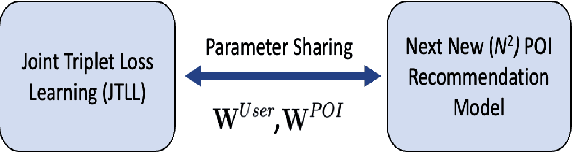
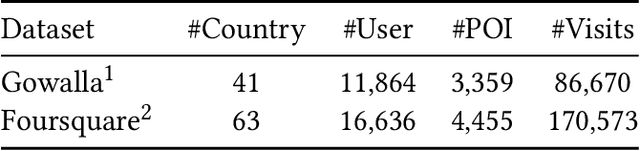
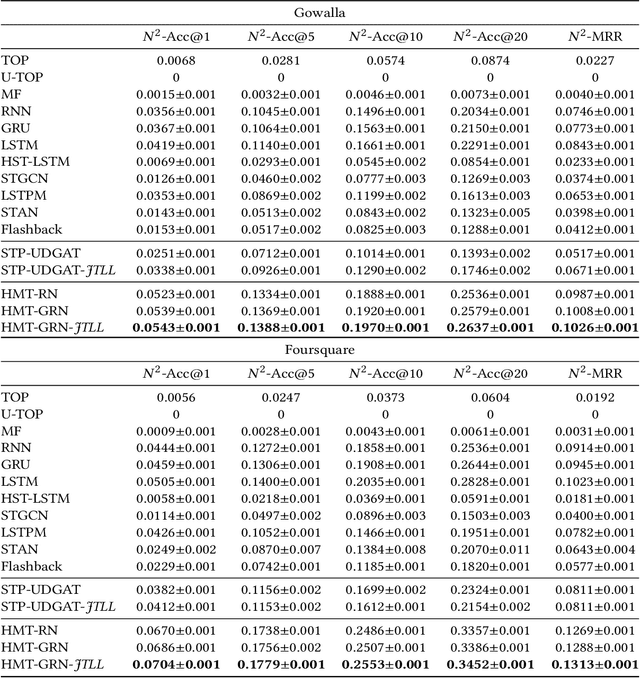
Sparsity of the User-POI matrix is a well established problem for next POI recommendation, which hinders effective learning of user preferences. Focusing on a more granular extension of the problem, we propose a Joint Triplet Loss Learning (JTLL) module for the Next New ($N^2$) POI recommendation task, which is more challenging. Our JTLL module first computes additional training samples from the users' historical POI visit sequence, then, a designed triplet loss function is proposed to decrease and increase distances of POI and user embeddings based on their respective relations. Next, the JTLL module is jointly trained with recent approaches to additionally learn unvisited relations for the recommendation task. Experiments conducted on two known real-world LBSN datasets show that our joint training module was able to improve the performances of recent existing works.
Combining Reinforcement Learning and Optimal Transport for the Traveling Salesman Problem
Mar 02, 2022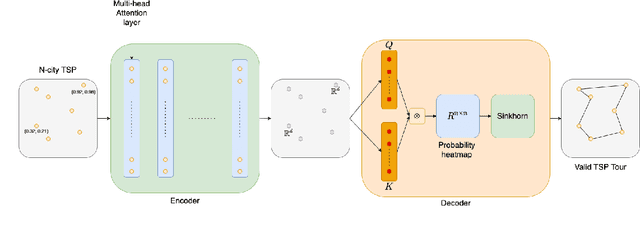
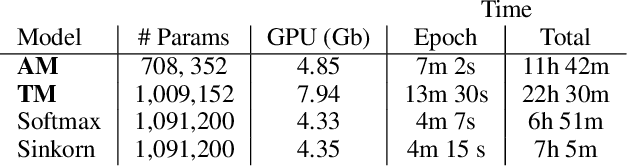

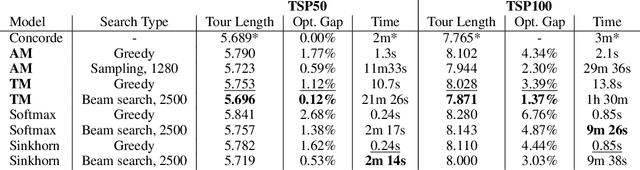
The traveling salesman problem is a fundamental combinatorial optimization problem with strong exact algorithms. However, as problems scale up, these exact algorithms fail to provide a solution in a reasonable time. To resolve this, current works look at utilizing deep learning to construct reasonable solutions. Such efforts have been very successful, but tend to be slow and compute intensive. This paper exemplifies the integration of entropic regularized optimal transport techniques as a layer in a deep reinforcement learning network. We show that we can construct a model capable of learning without supervision and inferences significantly faster than current autoregressive approaches. We also empirically evaluate the benefits of including optimal transport algorithms within deep learning models to enforce assignment constraints during end-to-end training.
Origin-Aware Next Destination Recommendation with Personalized Preference Attention
Jan 11, 2021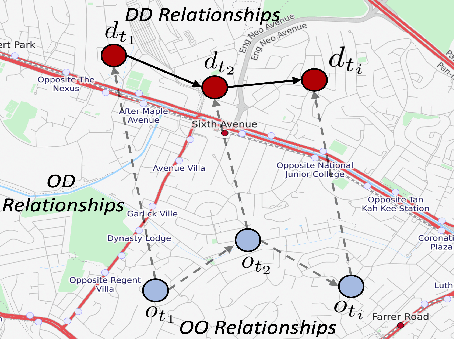
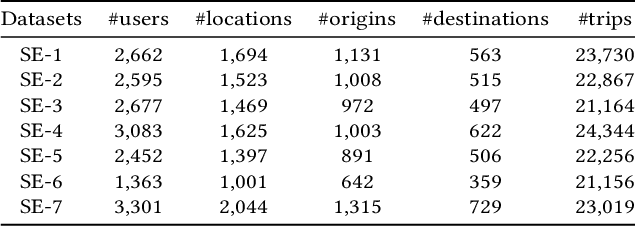
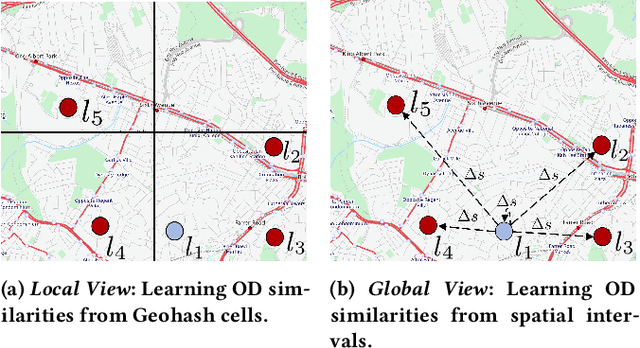
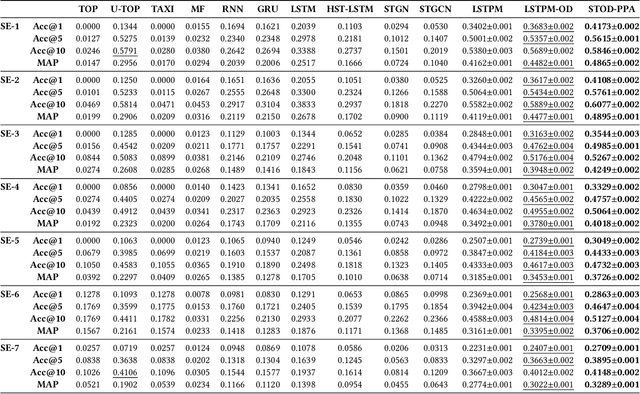
Next destination recommendation is an important task in the transportation domain of taxi and ride-hailing services, where users are recommended with personalized destinations given their current origin location. However, recent recommendation works do not satisfy this origin-awareness property, and only consider learning from historical destination locations, without origin information. Thus, the resulting approaches are unable to learn and predict origin-aware recommendations based on the user's current location, leading to sub-optimal performance and poor real-world practicality. Hence, in this work, we study the origin-aware next destination recommendation task. We propose the Spatial-Temporal Origin-Destination Personalized Preference Attention (STOD-PPA) encoder-decoder model to learn origin-origin (OO), destination-destination (DD), and origin-destination (OD) relationships by first encoding both origin and destination sequences with spatial and temporal factors in local and global views, then decoding them through personalized preference attention to predict the next destination. Experimental results on seven real-world user trajectory taxi datasets show that our model significantly outperforms baseline and state-of-the-art methods.
STP-UDGAT: Spatial-Temporal-Preference User Dimensional Graph Attention Network for Next POI Recommendation
Oct 06, 2020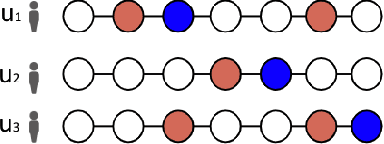
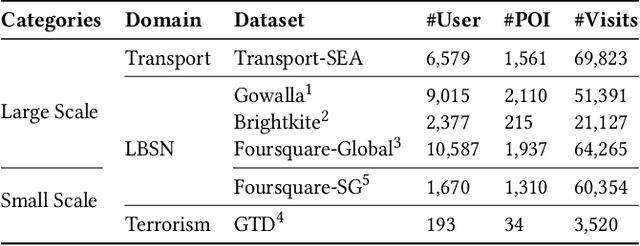
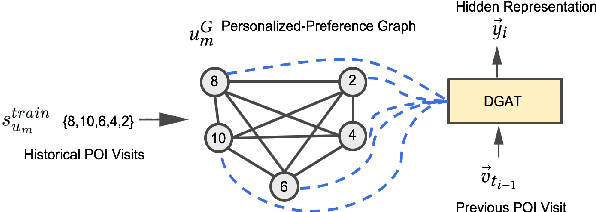
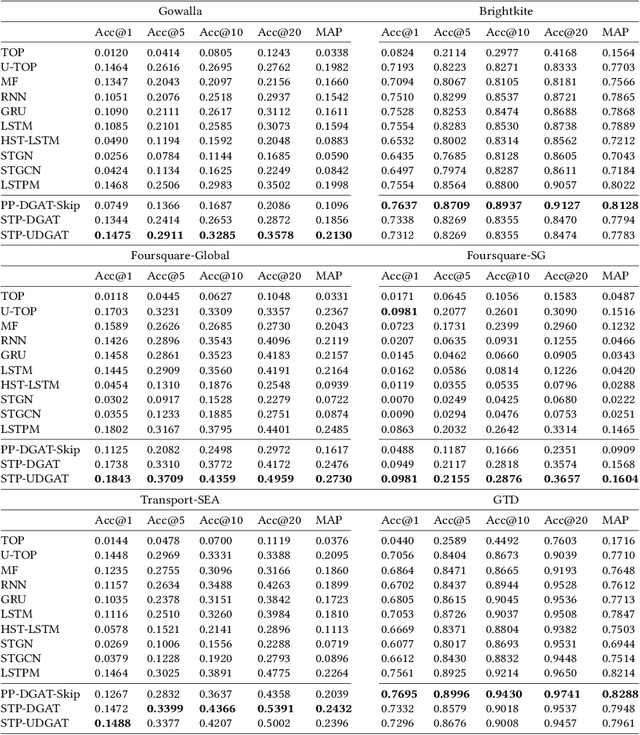
Next Point-of-Interest (POI) recommendation is a longstanding problem across the domains of Location-Based Social Networks (LBSN) and transportation. Recent Recurrent Neural Network (RNN) based approaches learn POI-POI relationships in a local view based on independent user visit sequences. This limits the model's ability to directly connect and learn across users in a global view to recommend semantically trained POIs. In this work, we propose a Spatial-Temporal-Preference User Dimensional Graph Attention Network (STP-UDGAT), a novel explore-exploit model that concurrently exploits personalized user preferences and explores new POIs in global spatial-temporal-preference (STP) neighbourhoods, while allowing users to selectively learn from other users. In addition, we propose random walks as a masked self-attention option to leverage the STP graphs' structures and find new higher-order POI neighbours during exploration. Experimental results on six real-world datasets show that our model significantly outperforms baseline and state-of-the-art methods.