 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnhancing Cross-Problem Vehicle Routing via Federated Learning
Apr 12, 2026Vehicle routing problems (VRPs) constitute a core optimization challenge in modern logistics and supply chain management. The recent neural combinatorial optimization (NCO) has demonstrated superior efficiency over some traditional algorithms. While serving as a primary NCO approach for solving general VRPs, current cross-problem learning paradigms are still subject to performance degradation and generalizability decay, when transferring from simple VRP variants to those involving different and complex constraints. To strengthen the paradigms, this paper offers an innovative "Multi-problem Pre-train, then Single-problem Fine-tune" framework with Federated Learning (MPSF-FL). This framework exploits the common knowledge of a federated global model to foster efficient cross-problem knowledge sharing and transfer among local models for single-problem fine-tuning. In this way, local models effectively retain common VRP knowledge from up-to-date global model, while being efficiently adapted to downstream VRPs with heterogeneous complex constraints. Experimental results demonstrate that our framework not only enhances the performance in diverse VRPs, but also improves the generalizability in unseen problems.
PyVRP$^+$: LLM-Driven Metacognitive Heuristic Evolution for Hybrid Genetic Search in Vehicle Routing Problems
Apr 09, 2026Designing high-performing metaheuristics for NP-hard combinatorial optimization problems, such as the Vehicle Routing Problem (VRP), remains a significant challenge, often requiring extensive domain expertise and manual tuning. Recent advances have demonstrated the potential of large language models (LLMs) to automate this process through evolutionary search. However, existing methods are largely reactive, relying on immediate performance feedback to guide what are essentially black-box code mutations. Our work departs from this paradigm by introducing Metacognitive Evolutionary Programming (MEP), a framework that elevates the LLM to a strategic discovery agent. Instead of merely reacting to performance scores, MEP compels the LLM to engage in a structured Reason-Act-Reflect cycle, forcing it to explicitly diagnose failures, formulate design hypotheses, and implement solutions grounded in pre-supplied domain knowledge. By applying MEP to evolve core components of the state-of-the-art Hybrid Genetic Search (HGS) algorithm, we discover novel heuristics that significantly outperform the original baseline. By steering the LLM to reason strategically about the exploration-exploitation trade-off, our approach discovers more effective and efficient heuristics applicable across a wide spectrum of VRP variants. Our results show that MEP discovers heuristics that yield significant performance gains over the original HGS baseline, improving solution quality by up to 2.70\% and reducing runtime by over 45\% on challenging VRP variants.
Towards Efficient Constraint Handling in Neural Solvers for Routing Problems
Feb 17, 2026Neural solvers have achieved impressive progress in addressing simple routing problems, particularly excelling in computational efficiency. However, their advantages under complex constraints remain nascent, for which current constraint-handling schemes via feasibility masking or implicit feasibility awareness can be inefficient or inapplicable for hard constraints. In this paper, we present Construct-and-Refine (CaR), the first general and efficient constraint-handling framework for neural routing solvers based on explicit learning-based feasibility refinement. Unlike prior construction-search hybrids that target reducing optimality gaps through heavy improvements yet still struggle with hard constraints, CaR achieves efficient constraint handling by designing a joint training framework that guides the construction module to generate diverse and high-quality solutions well-suited for a lightweight improvement process, e.g., 10 steps versus 5k steps in prior work. Moreover, CaR presents the first use of construction-improvement-shared representation, enabling potential knowledge sharing across paradigms by unifying the encoder, especially in more complex constrained scenarios. We evaluate CaR on typical hard routing constraints to showcase its broader applicability. Results demonstrate that CaR achieves superior feasibility, solution quality, and efficiency compared to both classical and neural state-of-the-art solvers.
DRAGON: LLM-Driven Decomposition and Reconstruction Agents for Large-Scale Combinatorial Optimization
Jan 10, 2026Large Language Models (LLMs) have recently shown promise in addressing combinatorial optimization problems (COPs) through prompt-based strategies. However, their scalability and generalization remain limited, and their effectiveness diminishes as problem size increases, particularly in routing problems involving more than 30 nodes. We propose DRAGON, which stands for Decomposition and Reconstruction Agents Guided OptimizatioN, a novel framework that combines the strengths of metaheuristic design and LLM reasoning. Starting from an initial global solution, DRAGON autonomously identifies regions with high optimization potential and strategically decompose large-scale COPs into manageable subproblems. Each subproblem is then reformulated as a concise, localized optimization task and solved through targeted LLM prompting guided by accumulated experiences. Finally, the locally optimized solutions are systematically reintegrated into the original global context to yield a significantly improved overall outcome. By continuously interacting with the optimization environment and leveraging an adaptive experience memory, the agents iteratively learn from feedback, effectively coupling symbolic reasoning with heuristic search. Empirical results show that, unlike existing LLM-based solvers limited to small-scale instances, DRAGON consistently produces feasible solutions on TSPLIB, CVRPLIB, and Weibull-5k bin packing benchmarks, and achieves near-optimal results (0.16% gap) on knapsack problems with over 3M variables. This work shows the potential of feedback-driven language agents as a new paradigm for generalizable and interpretable large-scale optimization.
Learning to Optimize Capacity Planning in Semiconductor Manufacturing
Sep 19, 2025In manufacturing, capacity planning is the process of allocating production resources in accordance with variable demand. The current industry practice in semiconductor manufacturing typically applies heuristic rules to prioritize actions, such as future change lists that account for incoming machine and recipe dedications. However, while offering interpretability, heuristics cannot easily account for the complex interactions along the process flow that can gradually lead to the formation of bottlenecks. Here, we present a neural network-based model for capacity planning on the level of individual machines, trained using deep reinforcement learning. By representing the policy using a heterogeneous graph neural network, the model directly captures the diverse relationships among machines and processing steps, allowing for proactive decision-making. We describe several measures taken to achieve sufficient scalability to tackle the vast space of possible machine-level actions. Our evaluation results cover Intel's small-scale Minifab model and preliminary experiments using the popular SMT2020 testbed. In the largest tested scenario, our trained policy increases throughput and decreases cycle time by about 1.8% each.
SHIELD: Multi-task Multi-distribution Vehicle Routing Solver with Sparsity and Hierarchy
Jun 11, 2025Recent advances toward foundation models for routing problems have shown great potential of a unified deep model for various VRP variants. However, they overlook the complex real-world customer distributions. In this work, we advance the Multi-Task VRP (MTVRP) setting to the more realistic yet challenging Multi-Task Multi-Distribution VRP (MTMDVRP) setting, and introduce SHIELD, a novel model that leverages both sparsity and hierarchy principles. Building on a deeper decoder architecture, we first incorporate the Mixture-of-Depths (MoD) technique to enforce sparsity. This improves both efficiency and generalization by allowing the model to dynamically select nodes to use or skip each decoder layer, providing the needed capacity to adaptively allocate computation for learning the task/distribution specific and shared representations. We also develop a context-based clustering layer that exploits the presence of hierarchical structures in the problems to produce better local representations. These two designs inductively bias the network to identify key features that are common across tasks and distributions, leading to significantly improved generalization on unseen ones. Our empirical results demonstrate the superiority of our approach over existing methods on 9 real-world maps with 16 VRP variants each.
Preference-Driven Multi-Objective Combinatorial Optimization with Conditional Computation
Jun 10, 2025Recent deep reinforcement learning methods have achieved remarkable success in solving multi-objective combinatorial optimization problems (MOCOPs) by decomposing them into multiple subproblems, each associated with a specific weight vector. However, these methods typically treat all subproblems equally and solve them using a single model, hindering the effective exploration of the solution space and thus leading to suboptimal performance. To overcome the limitation, we propose POCCO, a novel plug-and-play framework that enables adaptive selection of model structures for subproblems, which are subsequently optimized based on preference signals rather than explicit reward values. Specifically, we design a conditional computation block that routes subproblems to specialized neural architectures. Moreover, we propose a preference-driven optimization algorithm that learns pairwise preferences between winning and losing solutions. We evaluate the efficacy and versatility of POCCO by applying it to two state-of-the-art neural methods for MOCOPs. Experimental results across four classic MOCOP benchmarks demonstrate its significant superiority and strong generalization.
Generalizable Heuristic Generation Through Large Language Models with Meta-Optimization
May 27, 2025Heuristic design with large language models (LLMs) has emerged as a promising approach for tackling combinatorial optimization problems (COPs). However, existing approaches often rely on manually predefined evolutionary computation (EC) optimizers and single-task training schemes, which may constrain the exploration of diverse heuristic algorithms and hinder the generalization of the resulting heuristics. To address these issues, we propose Meta-Optimization of Heuristics (MoH), a novel framework that operates at the optimizer level, discovering effective optimizers through the principle of meta-learning. Specifically, MoH leverages LLMs to iteratively refine a meta-optimizer that autonomously constructs diverse optimizers through (self-)invocation, thereby eliminating the reliance on a predefined EC optimizer. These constructed optimizers subsequently evolve heuristics for downstream tasks, enabling broader heuristic exploration. Moreover, MoH employs a multi-task training scheme to promote its generalization capability. Experiments on classic COPs demonstrate that MoH constructs an effective and interpretable meta-optimizer, achieving state-of-the-art performance across various downstream tasks, particularly in cross-size settings.
Learning to Handle Complex Constraints for Vehicle Routing Problems
Oct 28, 2024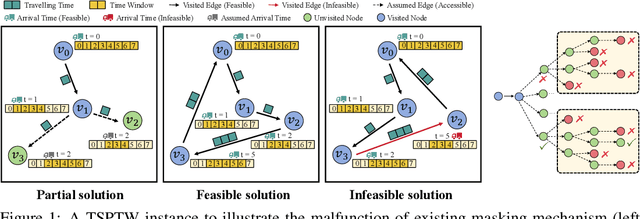
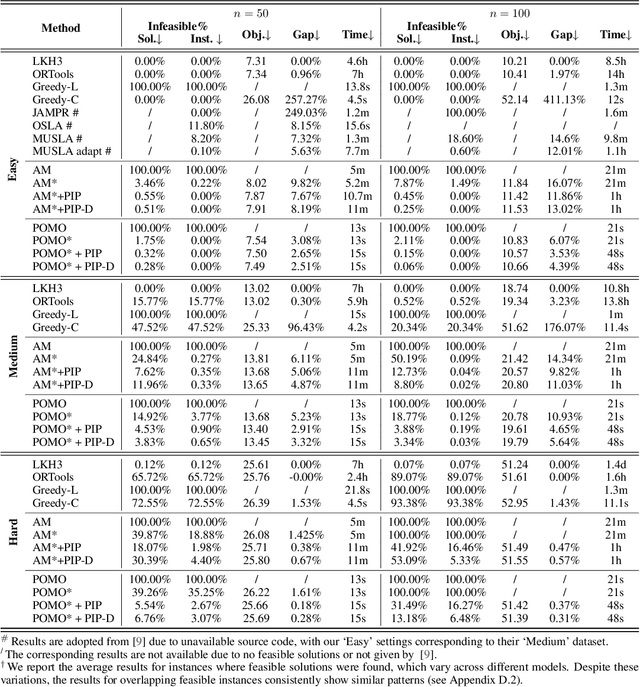
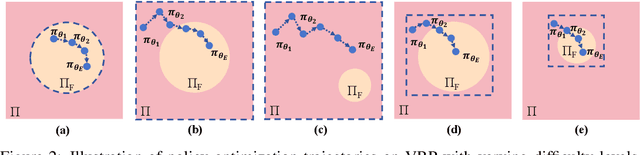
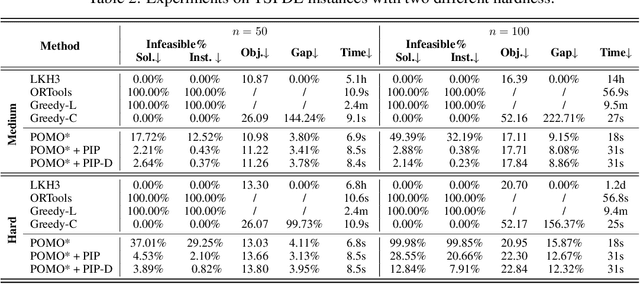
Vehicle Routing Problems (VRPs) can model many real-world scenarios and often involve complex constraints. While recent neural methods excel in constructing solutions based on feasibility masking, they struggle with handling complex constraints, especially when obtaining the masking itself is NP-hard. In this paper, we propose a novel Proactive Infeasibility Prevention (PIP) framework to advance the capabilities of neural methods towards more complex VRPs. Our PIP integrates the Lagrangian multiplier as a basis to enhance constraint awareness and introduces preventative infeasibility masking to proactively steer the solution construction process. Moreover, we present PIP-D, which employs an auxiliary decoder and two adaptive strategies to learn and predict these tailored masks, potentially enhancing performance while significantly reducing computational costs during training. To verify our PIP designs, we conduct extensive experiments on the highly challenging Traveling Salesman Problem with Time Window (TSPTW), and TSP with Draft Limit (TSPDL) variants under different constraint hardness levels. Notably, our PIP is generic to boost many neural methods, and exhibits both a significant reduction in infeasible rate and a substantial improvement in solution quality.
Collaboration! Towards Robust Neural Methods for Routing Problems
Oct 07, 2024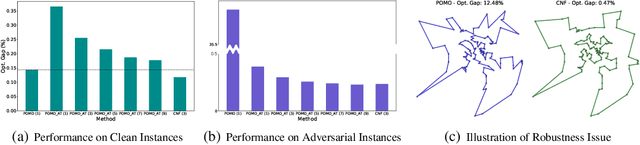
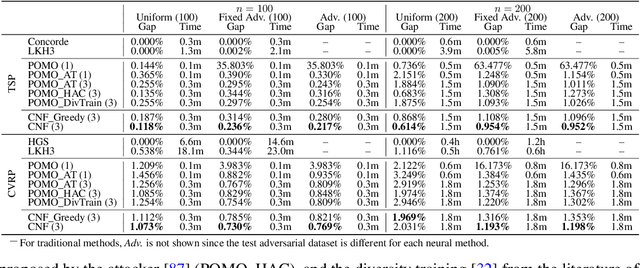
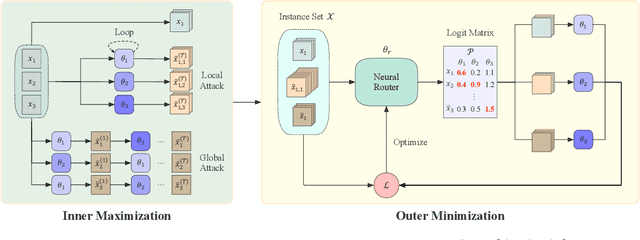
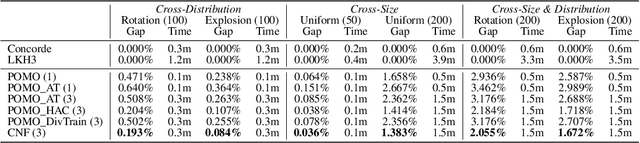
Despite enjoying desirable efficiency and reduced reliance on domain expertise, existing neural methods for vehicle routing problems (VRPs) suffer from severe robustness issues -- their performance significantly deteriorates on clean instances with crafted perturbations. To enhance robustness, we propose an ensemble-based Collaborative Neural Framework (CNF) w.r.t. the defense of neural VRP methods, which is crucial yet underexplored in the literature. Given a neural VRP method, we adversarially train multiple models in a collaborative manner to synergistically promote robustness against attacks, while boosting standard generalization on clean instances. A neural router is designed to adeptly distribute training instances among models, enhancing overall load balancing and collaborative efficacy. Extensive experiments verify the effectiveness and versatility of CNF in defending against various attacks across different neural VRP methods. Notably, our approach also achieves impressive out-of-distribution generalization on benchmark instances.