 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePP-LinkNet: Improving Semantic Segmentation of High Resolution Satellite Imagery with Multi-stage Training
Oct 14, 2020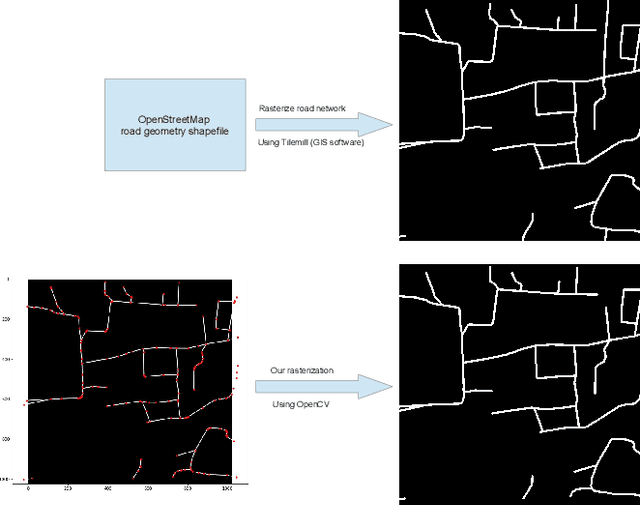
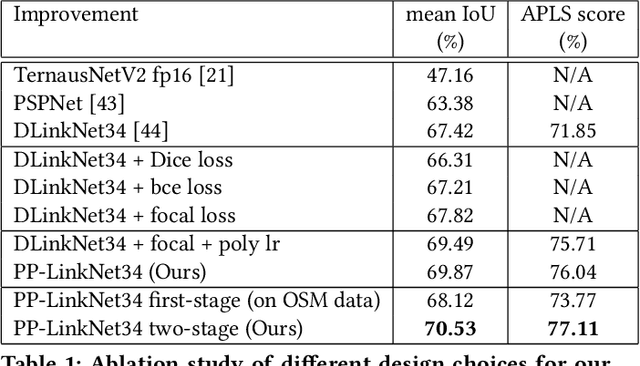

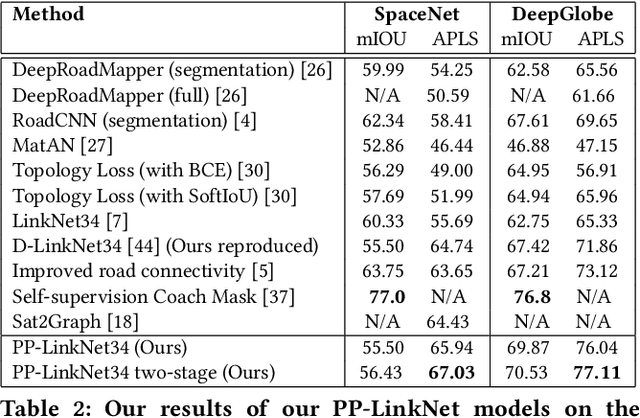
Road network and building footprint extraction is essential for many applications such as updating maps, traffic regulations, city planning, ride-hailing, disaster response \textit{etc}. Mapping road networks is currently both expensive and labor-intensive. Recently, improvements in image segmentation through the application of deep neural networks has shown promising results in extracting road segments from large scale, high resolution satellite imagery. However, significant challenges remain due to lack of enough labeled training data needed to build models for industry grade applications. In this paper, we propose a two-stage transfer learning technique to improve robustness of semantic segmentation for satellite images that leverages noisy pseudo ground truth masks obtained automatically (without human labor) from crowd-sourced OpenStreetMap (OSM) data. We further propose Pyramid Pooling-LinkNet (PP-LinkNet), an improved deep neural network for segmentation that uses focal loss, poly learning rate, and context module. We demonstrate the strengths of our approach through evaluations done on three popular datasets over two tasks, namely, road extraction and building foot-print detection. Specifically, we obtain 78.19\% meanIoU on SpaceNet building footprint dataset, 67.03\% and 77.11\% on the road topology metric on SpaceNet and DeepGlobe road extraction dataset, respectively.
STP-UDGAT: Spatial-Temporal-Preference User Dimensional Graph Attention Network for Next POI Recommendation
Oct 06, 2020
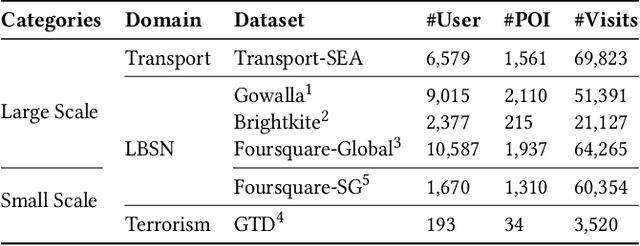
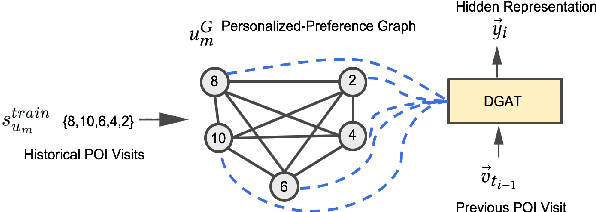
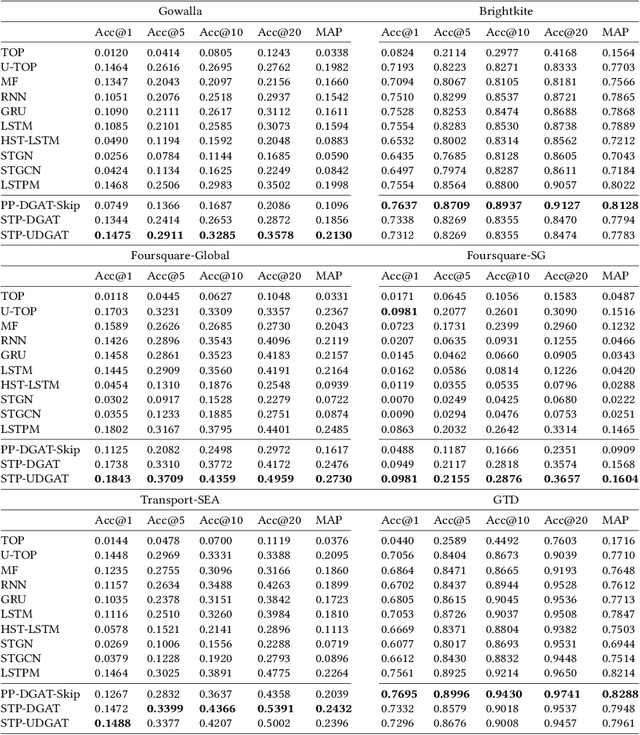
Next Point-of-Interest (POI) recommendation is a longstanding problem across the domains of Location-Based Social Networks (LBSN) and transportation. Recent Recurrent Neural Network (RNN) based approaches learn POI-POI relationships in a local view based on independent user visit sequences. This limits the model's ability to directly connect and learn across users in a global view to recommend semantically trained POIs. In this work, we propose a Spatial-Temporal-Preference User Dimensional Graph Attention Network (STP-UDGAT), a novel explore-exploit model that concurrently exploits personalized user preferences and explores new POIs in global spatial-temporal-preference (STP) neighbourhoods, while allowing users to selectively learn from other users. In addition, we propose random walks as a masked self-attention option to leverage the STP graphs' structures and find new higher-order POI neighbours during exploration. Experimental results on six real-world datasets show that our model significantly outperforms baseline and state-of-the-art methods.