 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePetalView: Fine-grained Location and Orientation Extraction of Street-view Images via Cross-view Local Search with Supplementary Materials
Jun 19, 2024



Satellite-based street-view information extraction by cross-view matching refers to a task that extracts the location and orientation information of a given street-view image query by using one or multiple geo-referenced satellite images. Recent work has initiated a new research direction to find accurate information within a local area covered by one satellite image centered at a location prior (e.g., from GPS). It can be used as a standalone solution or complementary step following a large-scale search with multiple satellite candidates. However, these existing works require an accurate initial orientation (angle) prior (e.g., from IMU) and/or do not efficiently search through all possible poses. To allow efficient search and to give accurate prediction regardless of the existence or the accuracy of the angle prior, we present PetalView extractors with multi-scale search. The PetalView extractors give semantically meaningful features that are equivalent across two drastically different views, and the multi-scale search strategy efficiently inspects the satellite image from coarse to fine granularity to provide sub-meter and sub-degree precision extraction. Moreover, when an angle prior is given, we propose a learnable prior angle mixer to utilize this information. Our method obtains the best performance on the VIGOR dataset and successfully improves the performance on KITTI dataset test 1 set with the recall within 1 meter (r@1m) for location estimation to 68.88% and recall within 1 degree (r@1d) 21.10% when no angle prior is available, and with angle prior achieves stable estimations at r@1m and r@1d above 70% and 21%, up to a 40-degree noise level.
* This paper has been accepted by ACM Multimedia 2023. This version contains additional supplementary materials
Beyond Geo-localization: Fine-grained Orientation of Street-view Images by Cross-view Matching with Satellite Imagery with Supplementary Materials
Jul 13, 2023
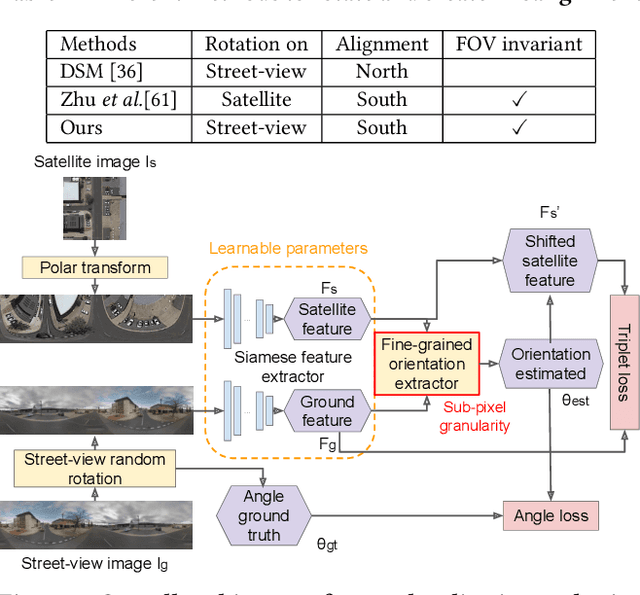

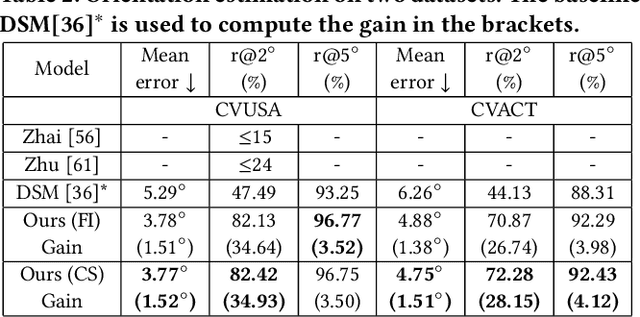
Street-view imagery provides us with novel experiences to explore different places remotely. Carefully calibrated street-view images (e.g. Google Street View) can be used for different downstream tasks, e.g. navigation, map features extraction. As personal high-quality cameras have become much more affordable and portable, an enormous amount of crowdsourced street-view images are uploaded to the internet, but commonly with missing or noisy sensor information. To prepare this hidden treasure for "ready-to-use" status, determining missing location information and camera orientation angles are two equally important tasks. Recent methods have achieved high performance on geo-localization of street-view images by cross-view matching with a pool of geo-referenced satellite imagery. However, most of the existing works focus more on geo-localization than estimating the image orientation. In this work, we re-state the importance of finding fine-grained orientation for street-view images, formally define the problem and provide a set of evaluation metrics to assess the quality of the orientation estimation. We propose two methods to improve the granularity of the orientation estimation, achieving 82.4% and 72.3% accuracy for images with estimated angle errors below 2 degrees for CVUSA and CVACT datasets, corresponding to 34.9% and 28.2% absolute improvement compared to previous works. Integrating fine-grained orientation estimation in training also improves the performance on geo-localization, giving top 1 recall 95.5%/85.5% and 86.8%/80.4% for orientation known/unknown tests on the two datasets.
* This paper has been accepted by ACM Multimedia 2022. This version contains additional supplementary materials
PP-LinkNet: Improving Semantic Segmentation of High Resolution Satellite Imagery with Multi-stage Training
Oct 14, 2020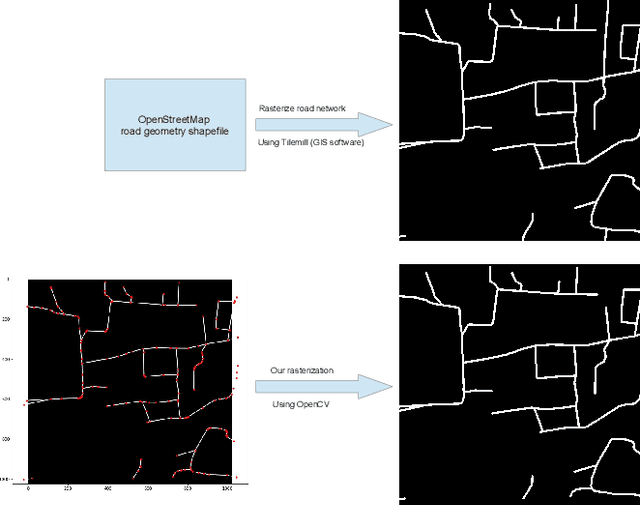
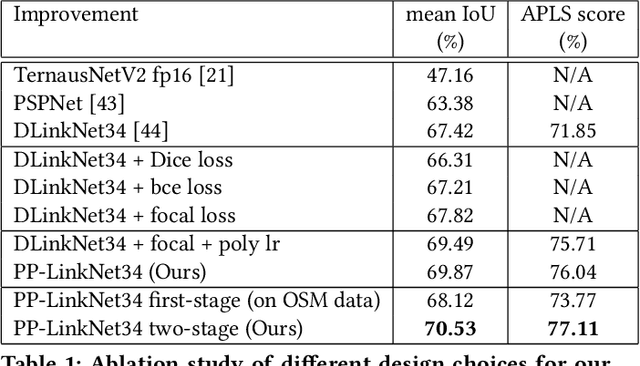

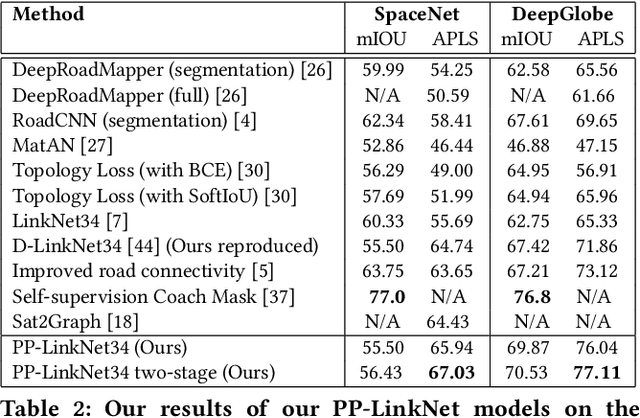
Road network and building footprint extraction is essential for many applications such as updating maps, traffic regulations, city planning, ride-hailing, disaster response \textit{etc}. Mapping road networks is currently both expensive and labor-intensive. Recently, improvements in image segmentation through the application of deep neural networks has shown promising results in extracting road segments from large scale, high resolution satellite imagery. However, significant challenges remain due to lack of enough labeled training data needed to build models for industry grade applications. In this paper, we propose a two-stage transfer learning technique to improve robustness of semantic segmentation for satellite images that leverages noisy pseudo ground truth masks obtained automatically (without human labor) from crowd-sourced OpenStreetMap (OSM) data. We further propose Pyramid Pooling-LinkNet (PP-LinkNet), an improved deep neural network for segmentation that uses focal loss, poly learning rate, and context module. We demonstrate the strengths of our approach through evaluations done on three popular datasets over two tasks, namely, road extraction and building foot-print detection. Specifically, we obtain 78.19\% meanIoU on SpaceNet building footprint dataset, 67.03\% and 77.11\% on the road topology metric on SpaceNet and DeepGlobe road extraction dataset, respectively.