 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePP-LinkNet: Improving Semantic Segmentation of High Resolution Satellite Imagery with Multi-stage Training
Paper and Code
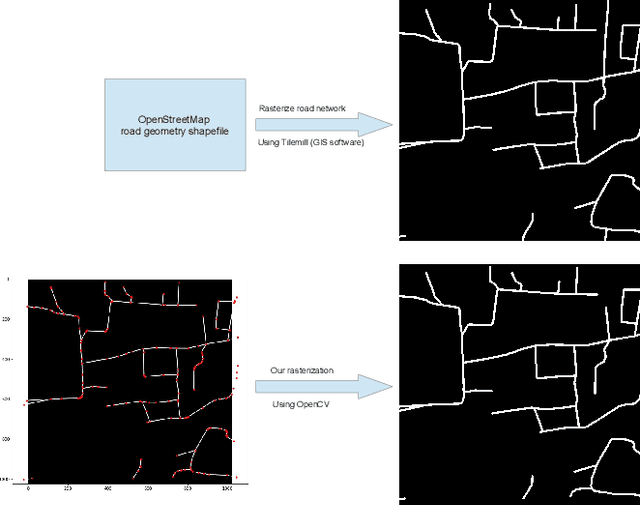
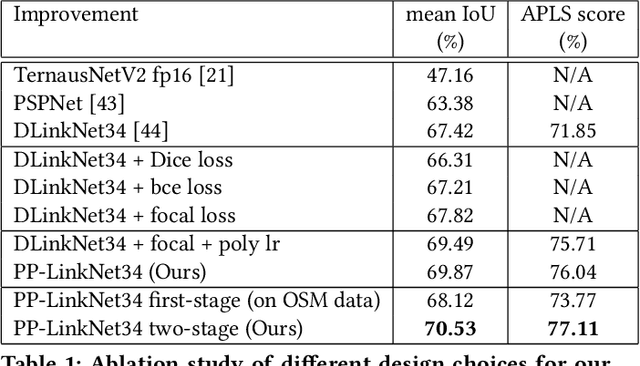

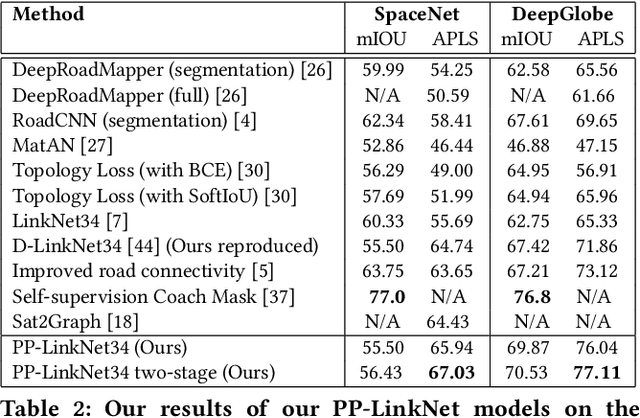
Road network and building footprint extraction is essential for many applications such as updating maps, traffic regulations, city planning, ride-hailing, disaster response \textit{etc}. Mapping road networks is currently both expensive and labor-intensive. Recently, improvements in image segmentation through the application of deep neural networks has shown promising results in extracting road segments from large scale, high resolution satellite imagery. However, significant challenges remain due to lack of enough labeled training data needed to build models for industry grade applications. In this paper, we propose a two-stage transfer learning technique to improve robustness of semantic segmentation for satellite images that leverages noisy pseudo ground truth masks obtained automatically (without human labor) from crowd-sourced OpenStreetMap (OSM) data. We further propose Pyramid Pooling-LinkNet (PP-LinkNet), an improved deep neural network for segmentation that uses focal loss, poly learning rate, and context module. We demonstrate the strengths of our approach through evaluations done on three popular datasets over two tasks, namely, road extraction and building foot-print detection. Specifically, we obtain 78.19\% meanIoU on SpaceNet building footprint dataset, 67.03\% and 77.11\% on the road topology metric on SpaceNet and DeepGlobe road extraction dataset, respectively.