 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFedRio: Personalized Federated Social Bot Detection via Cooperative Reinforced Contrastive Adversarial Distillation
Apr 12, 2026Social bot detection is critical to the stability and security of online social platforms. However, current state-of-the-art bot detection models are largely developed in isolation, overlooking the benefits of leveraging shared detection patterns across platforms to improve performance and promptly identify emerging bot variants. The heterogeneity of data distributions and model architectures further complicates the design of an effective cross-platform and cross-model detection framework. To address these challenges, we propose FedRio (Personalized Federated Social Bot Detection with Cooperative Reinforced Contrastive Adversarial Distillation framework. We first introduce an adaptive message-passing module as the graph neural network backbone for each client. To facilitate efficient knowledge sharing of global data distributions, we design a federated knowledge extraction mechanism based on generative adversarial networks. Additionally, we employ a multi-stage adversarial contrastive learning strategy to enforce feature space consistency among clients and reduce divergence between local and global models. Finally, we adopt adaptive server-side parameter aggregation and reinforcement learning-based client-side parameter control to better accommodate data heterogeneity in heterogeneous federated settings. Extensive experiments on two real-world social bot detection benchmarks demonstrate that FedRio consistently outperforms state-of-the-art federated learning baselines in detection accuracy, communication efficiency, and feature space consistency, while remaining competitive with published centralized results under substantially stronger privacy constraints.
Code Graph Model (CGM): A Graph-Integrated Large Language Model for Repository-Level Software Engineering Tasks
May 22, 2025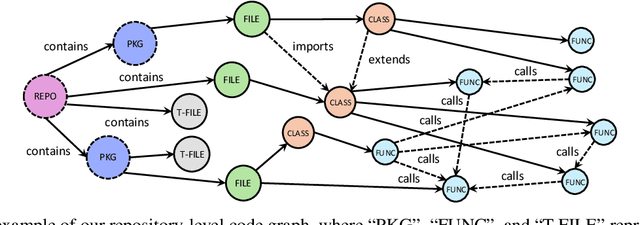
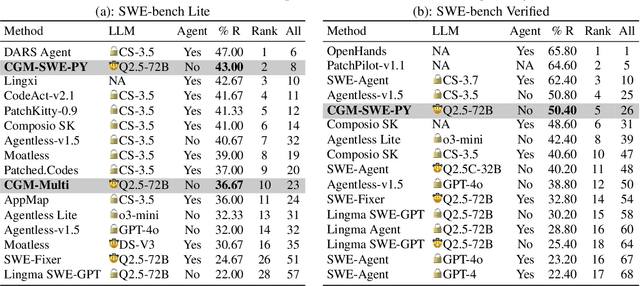
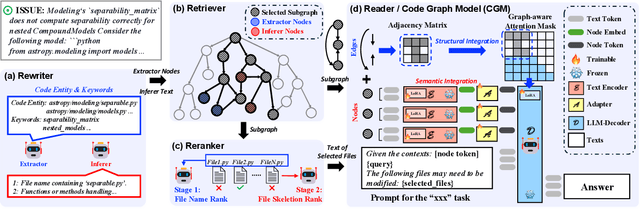
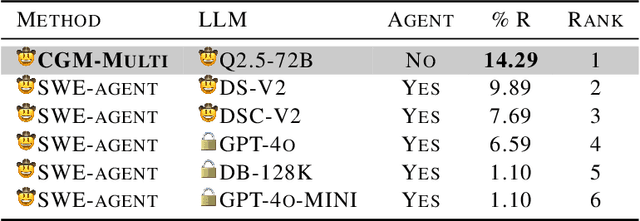
Recent advances in Large Language Models (LLMs) have shown promise in function-level code generation, yet repository-level software engineering tasks remain challenging. Current solutions predominantly rely on proprietary LLM agents, which introduce unpredictability and limit accessibility, raising concerns about data privacy and model customization. This paper investigates whether open-source LLMs can effectively address repository-level tasks without requiring agent-based approaches. We demonstrate this is possible by enabling LLMs to comprehend functions and files within codebases through their semantic information and structural dependencies. To this end, we introduce Code Graph Models (CGMs), which integrate repository code graph structures into the LLM's attention mechanism and map node attributes to the LLM's input space using a specialized adapter. When combined with an agentless graph RAG framework, our approach achieves a 43.00% resolution rate on the SWE-bench Lite benchmark using the open-source Qwen2.5-72B model. This performance ranks first among open weight models, second among methods with open-source systems, and eighth overall, surpassing the previous best open-source model-based method by 12.33%.
Certainly Bot Or Not? Trustworthy Social Bot Detection via Robust Multi-Modal Neural Processes
Mar 11, 2025



Social bot detection is crucial for mitigating misinformation, online manipulation, and coordinated inauthentic behavior. While existing neural network-based detectors perform well on benchmarks, they struggle with generalization due to distribution shifts across datasets and frequently produce overconfident predictions for out-of-distribution accounts beyond the training data. To address this, we introduce a novel Uncertainty Estimation for Social Bot Detection (UESBD) framework, which quantifies the predictive uncertainty of detectors beyond mere classification. For this task, we propose Robust Multi-modal Neural Processes (RMNP), which aims to enhance the robustness of multi-modal neural processes to modality inconsistencies caused by social bot camouflage. RMNP first learns unimodal representations through modality-specific encoders. Then, unimodal attentive neural processes are employed to encode the Gaussian distribution of unimodal latent variables. Furthermore, to avoid social bots stealing human features to camouflage themselves thus causing certain modalities to provide conflictive information, we introduce an evidential gating network to explicitly model the reliability of modalities. The joint latent distribution is learned through the generalized product of experts, which takes the reliability of each modality into consideration during fusion. The final prediction is obtained through Monte Carlo sampling of the joint latent distribution followed by a decoder. Experiments on three real-world benchmarks show the effectiveness of RMNP in classification and uncertainty estimation, as well as its robustness to modality conflicts.
SeBot: Structural Entropy Guided Multi-View Contrastive Learning for Social Bot Detection
May 18, 2024



Recent advancements in social bot detection have been driven by the adoption of Graph Neural Networks. The social graph, constructed from social network interactions, contains benign and bot accounts that influence each other. However, previous graph-based detection methods that follow the transductive message-passing paradigm may not fully utilize hidden graph information and are vulnerable to adversarial bot behavior. The indiscriminate message passing between nodes from different categories and communities results in excessively homogeneous node representations, ultimately reducing the effectiveness of social bot detectors. In this paper, we propose SEBot, a novel multi-view graph-based contrastive learning-enabled social bot detector. In particular, we use structural entropy as an uncertainty metric to optimize the entire graph's structure and subgraph-level granularity, revealing the implicitly existing hierarchical community structure. And we design an encoder to enable message passing beyond the homophily assumption, enhancing robustness to adversarial behaviors of social bots. Finally, we employ multi-view contrastive learning to maximize mutual information between different views and enhance the detection performance through multi-task learning. Experimental results demonstrate that our approach significantly improves the performance of social bot detection compared with SOTA methods.
BotDGT: Dynamicity-aware Social Bot Detection with Dynamic Graph Transformers
Apr 24, 2024



Detecting social bots has evolved into a pivotal yet intricate task, aimed at combating the dissemination of misinformation and preserving the authenticity of online interactions. While earlier graph-based approaches, which leverage topological structure of social networks, yielded notable outcomes, they overlooked the inherent dynamicity of social networks -- In reality, they largely depicted the social network as a static graph and solely relied on its most recent state. Due to the absence of dynamicity modeling, such approaches are vulnerable to evasion, particularly when advanced social bots interact with other users to camouflage identities and escape detection. To tackle these challenges, we propose BotDGT, a novel framework that not only considers the topological structure, but also effectively incorporates dynamic nature of social network. Specifically, we characterize a social network as a dynamic graph. A structural module is employed to acquire topological information from each historical snapshot. Additionally, a temporal module is proposed to integrate historical context and model the evolving behavior patterns exhibited by social bots and legitimate users. Experimental results demonstrate the superiority of BotDGT against the leading methods that neglected the dynamic nature of social networks in terms of accuracy, recall, and F1-score.
FedACK: Federated Adversarial Contrastive Knowledge Distillation for Cross-Lingual and Cross-Model Social Bot Detection
Mar 10, 2023



Social bot detection is of paramount importance to the resilience and security of online social platforms. The state-of-the-art detection models are siloed and have largely overlooked a variety of data characteristics from multiple cross-lingual platforms. Meanwhile, the heterogeneity of data distribution and model architecture makes it intricate to devise an efficient cross-platform and cross-model detection framework. In this paper, we propose FedACK, a new federated adversarial contrastive knowledge distillation framework for social bot detection. We devise a GAN-based federated knowledge distillation mechanism for efficiently transferring knowledge of data distribution among clients. In particular, a global generator is used to extract the knowledge of global data distribution and distill it into each client's local model. We leverage local discriminator to enable customized model design and use local generator for data enhancement with hard-to-decide samples. Local training is conducted as multi-stage adversarial and contrastive learning to enable consistent feature spaces among clients and to constrain the optimization direction of local models, reducing the divergences between local and global models. Experiments demonstrate that FedACK outperforms the state-of-the-art approaches in terms of accuracy, communication efficiency, and feature space consistency.
RoSGAS: Adaptive Social Bot Detection with Reinforced Self-Supervised GNN Architecture Search
Jun 14, 2022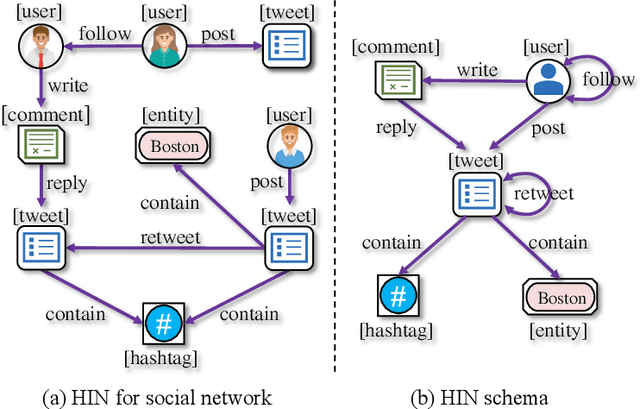
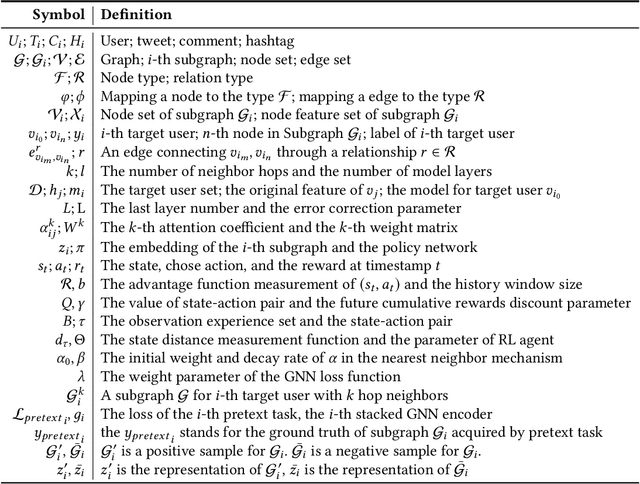
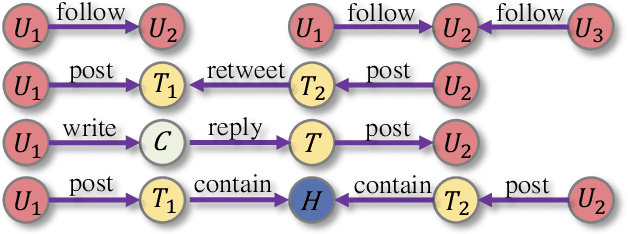
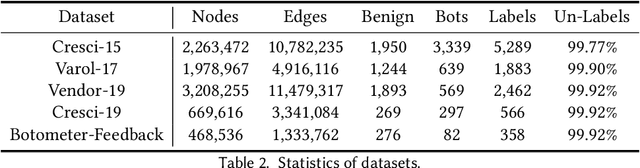
Social bots are referred to as the automated accounts on social networks that make attempts to behave like human. While Graph Neural Networks (GNNs) has been massively applied to the field of social bot detection, a huge amount of domain expertise and prior knowledge is heavily engaged in the state-of-the art approaches to design a dedicated neural network architecture for a specific classification task. Involving oversized nodes and network layers in the model design, however, usually causes the over-smoothing problem and the lack of embedding discrimination. In this paper, we propose RoSGAS, a novel Reinforced and Self-supervised GNN Architecture Search framework to adaptively pinpoint the most suitable multi-hop neighborhood and the number of layers in the GNN architecture. More specifically, we consider the social bot detection problem as a user-centric subgraph embedding and classification task. We exploit heterogeneous information network to present the user connectivity by leveraging account metadata, relationships, behavioral features and content features. RoSGAS uses a multi-agent deep reinforcement learning (RL) mechanism for navigating the search of optimal neighborhood and network layers to learn individually the subgraph embedding for each target user. A nearest neighbor mechanism is developed for accelerating the RL training process, and RoSGAS can learn more discriminative subgraph embedding with the aid of self-supervised learning. Experiments on 5 Twitter datasets show that RoSGAS outperforms the state-of-the-art approaches in terms of accuracy, training efficiency and stability, and has better generalization when handling unseen samples.
Reversible Upper Confidence Bound Algorithm to Generate Diverse Optimized Candidates
Dec 30, 2021
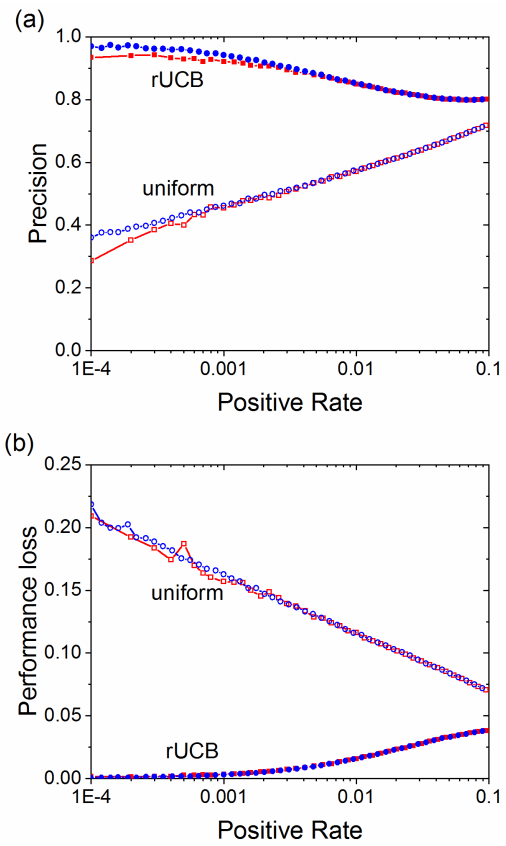
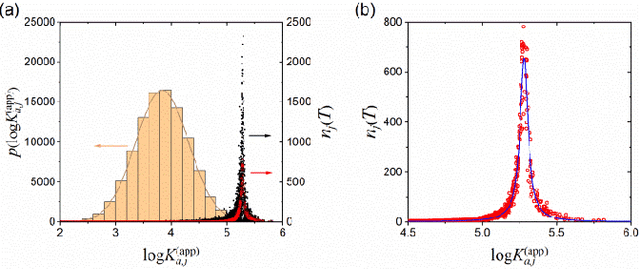
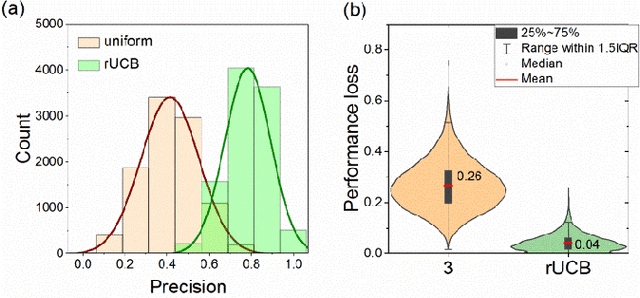
Most algorithms for the multi-armed bandit problem in reinforcement learning aimed to maximize the expected reward, which are thus useful in searching the optimized candidate with the highest reward (function value) for diverse applications (e.g., AlphaGo). However, in some typical application scenaios such as drug discovery, the aim is to search a diverse set of candidates with high reward. Here we propose a reversible upper confidence bound (rUCB) algorithm for such a purpose, and demonstrate its application in virtual screening upon intrinsically disordered proteins (IDPs). It is shown that rUCB greatly reduces the query times while achieving both high accuracy and low performance loss.The rUCB may have potential application in multipoint optimization and other reinforcement-learning cases.
* 10 pages, 10 figures