 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSVIA: A Street View Image Anonymization Framework for Self-Driving Applications
Jan 16, 2025



In recent years, there has been an increasing interest in image anonymization, particularly focusing on the de-identification of faces and individuals. However, for self-driving applications, merely de-identifying faces and individuals might not provide sufficient privacy protection since street views like vehicles and buildings can still disclose locations, trajectories, and other sensitive information. Therefore, it remains crucial to extend anonymization techniques to street view images to fully preserve the privacy of users, pedestrians, and vehicles. In this paper, we propose a Street View Image Anonymization (SVIA) framework for self-driving applications. The SVIA framework consists of three integral components: a semantic segmenter to segment an input image into functional regions, an inpainter to generate alternatives to privacy-sensitive regions, and a harmonizer to seamlessly stitch modified regions to guarantee visual coherence. Compared to existing methods, SVIA achieves a much better trade-off between image generation quality and privacy protection, as evidenced by experimental results for five common metrics on two widely used public datasets.
CredID: Credible Multi-Bit Watermark for Large Language Models Identification
Dec 04, 2024



Large Language Models (LLMs) are widely used in complex natural language processing tasks but raise privacy and security concerns due to the lack of identity recognition. This paper proposes a multi-party credible watermarking framework (CredID) involving a trusted third party (TTP) and multiple LLM vendors to address these issues. In the watermark embedding stage, vendors request a seed from the TTP to generate watermarked text without sending the user's prompt. In the extraction stage, the TTP coordinates each vendor to extract and verify the watermark from the text. This provides a credible watermarking scheme while preserving vendor privacy. Furthermore, current watermarking algorithms struggle with text quality, information capacity, and robustness, making it challenging to meet the diverse identification needs of LLMs. Thus, we propose a novel multi-bit watermarking algorithm and an open-source toolkit to facilitate research. Experiments show our CredID enhances watermark credibility and efficiency without compromising text quality. Additionally, we successfully utilized this framework to achieve highly accurate identification among multiple LLM vendors.
Building Intelligence Identification System via Large Language Model Watermarking: A Survey and Beyond
Jul 15, 2024



Large Large Language Models (LLMs) are increasingly integrated into diverse industries, posing substantial security risks due to unauthorized replication and misuse. To mitigate these concerns, robust identification mechanisms are widely acknowledged as an effective strategy. Identification systems for LLMs now rely heavily on watermarking technology to manage and protect intellectual property and ensure data security. However, previous studies have primarily concentrated on the basic principles of algorithms and lacked a comprehensive analysis of watermarking theory and practice from the perspective of intelligent identification. To bridge this gap, firstly, we explore how a robust identity recognition system can be effectively implemented and managed within LLMs by various participants using watermarking technology. Secondly, we propose a mathematical framework based on mutual information theory, which systematizes the identification process to achieve more precise and customized watermarking. Additionally, we present a comprehensive evaluation of performance metrics for LLM watermarking, reflecting participant preferences and advancing discussions on its identification applications. Lastly, we outline the existing challenges in current watermarking technologies and theoretical frameworks, and provide directional guidance to address these challenges. Our systematic classification and detailed exposition aim to enhance the comparison and evaluation of various methods, fostering further research and development toward a transparent, secure, and equitable LLM ecosystem.
Towards Integrated Traffic Control with Operating Decentralized Autonomous Organization
Jul 25, 2023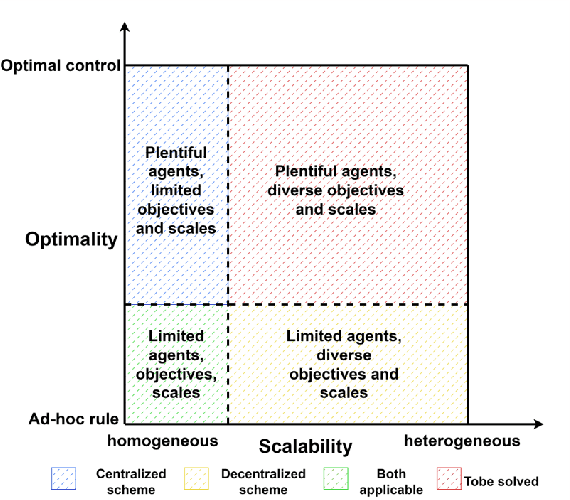
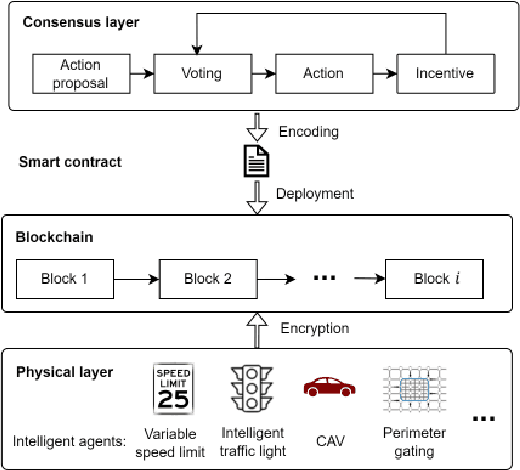
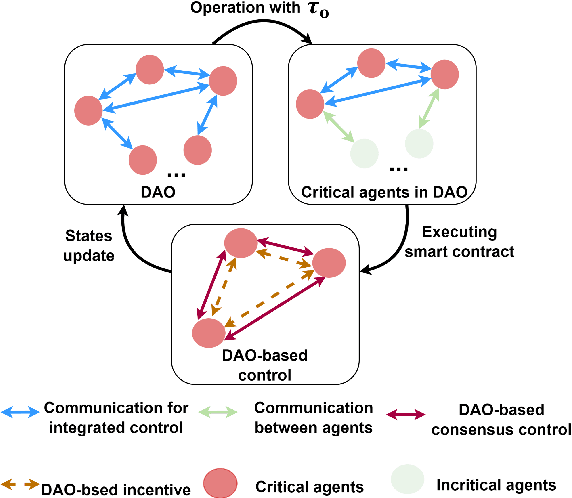
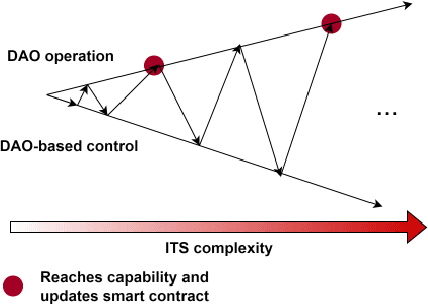
With a growing complexity of the intelligent traffic system (ITS), an integrated control of ITS that is capable of considering plentiful heterogeneous intelligent agents is desired. However, existing control methods based on the centralized or the decentralized scheme have not presented their competencies in considering the optimality and the scalability simultaneously. To address this issue, we propose an integrated control method based on the framework of Decentralized Autonomous Organization (DAO). The proposed method achieves a global consensus on energy consumption efficiency (ECE), meanwhile to optimize the local objectives of all involved intelligent agents, through a consensus and incentive mechanism. Furthermore, an operation algorithm is proposed regarding the issue of structural rigidity in DAO. Specifically, the proposed operation approach identifies critical agents to execute the smart contract in DAO, which ultimately extends the capability of DAO-based control. In addition, a numerical experiment is designed to examine the performance of the proposed method. The experiment results indicate that the controlled agents can achieve a consensus faster on the global objective with improved local objectives by the proposed method, compare to existing decentralized control methods. In general, the proposed method shows a great potential in developing an integrated control system in the ITS
IR Design for Application-Specific Natural Language: A Case Study on Traffic Data
Jul 13, 2023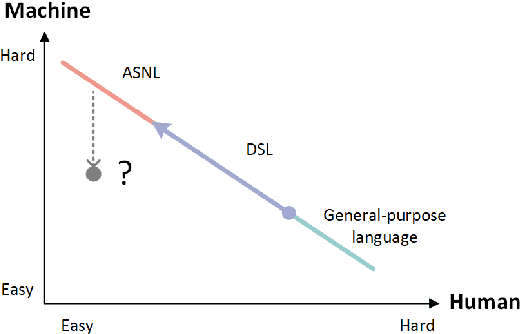
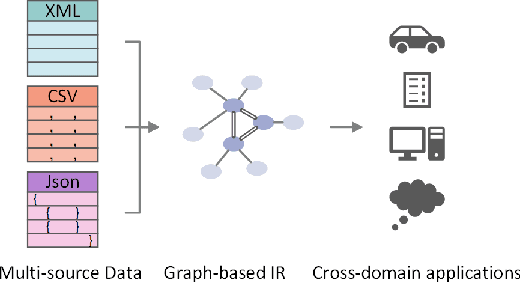
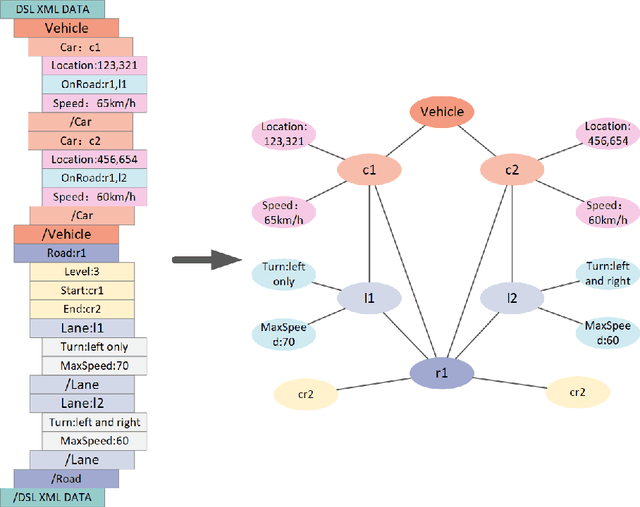
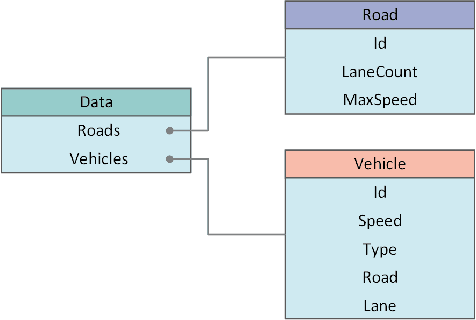
In the realm of software applications in the transportation industry, Domain-Specific Languages (DSLs) have enjoyed widespread adoption due to their ease of use and various other benefits. With the ceaseless progress in computer performance and the rapid development of large-scale models, the possibility of programming using natural language in specified applications - referred to as Application-Specific Natural Language (ASNL) - has emerged. ASNL exhibits greater flexibility and freedom, which, in turn, leads to an increase in computational complexity for parsing and a decrease in processing performance. To tackle this issue, our paper advances a design for an intermediate representation (IR) that caters to ASNL and can uniformly process transportation data into graph data format, improving data processing performance. Experimental comparisons reveal that in standard data query operations, our proposed IR design can achieve a speed improvement of over forty times compared to direct usage of standard XML format data.
TransWorldNG: Traffic Simulation via Foundation Model
May 25, 2023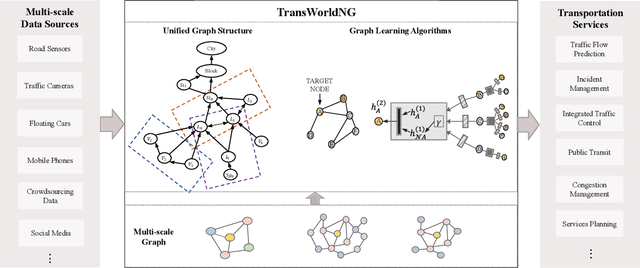
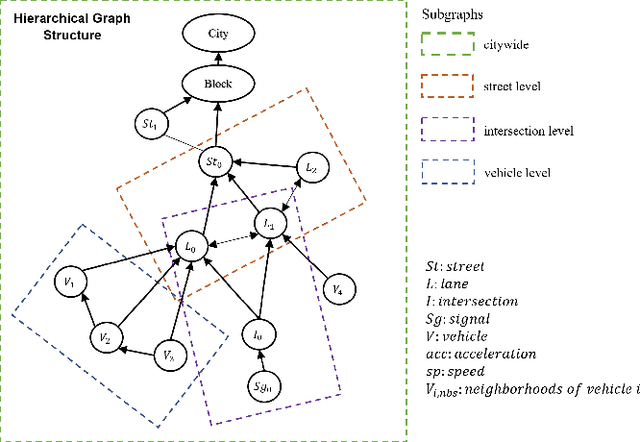
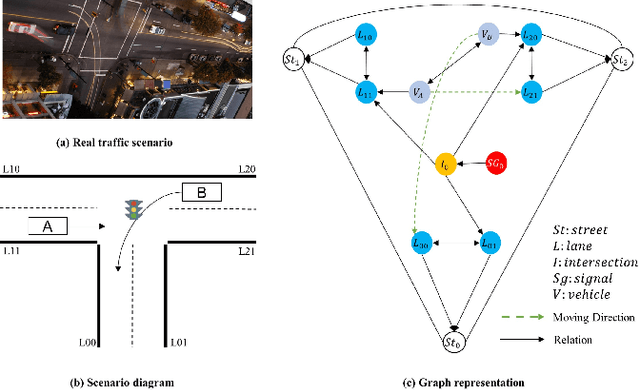
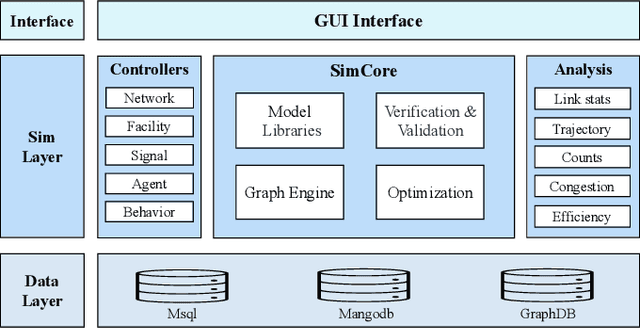
Traffic simulation is a crucial tool for transportation decision-making and policy development. However, achieving realistic simulations in the face of the high dimensionality and heterogeneity of traffic environments is a longstanding challenge. In this paper, we present TransWordNG, a traffic simulator that uses Data-driven algorithms and Graph Computing techniques to learn traffic dynamics from real data. The functionality and structure of TransWorldNG are introduced, which utilize a foundation model for transportation management and control. The results demonstrate that TransWorldNG can generate more realistic traffic patterns compared to traditional simulators. Additionally, TransWorldNG exhibits better scalability, as it shows linear growth in computation time as the scenario scale increases. To the best of our knowledge, this is the first traffic simulator that can automatically learn traffic patterns from real-world data and efficiently generate accurate and realistic traffic environments.
Building Transportation Foundation Model via Generative Graph Transformer
May 24, 2023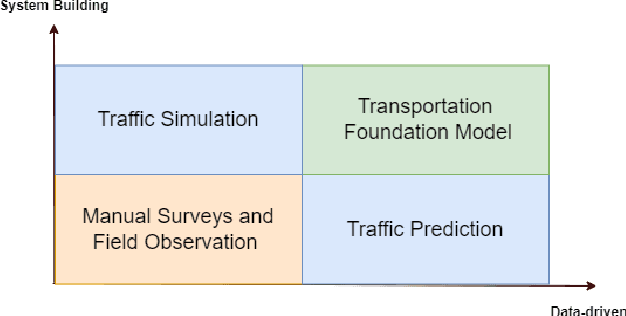
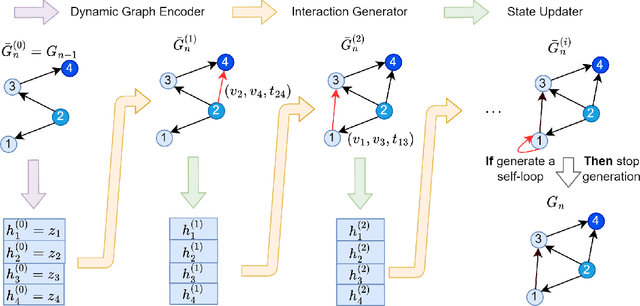
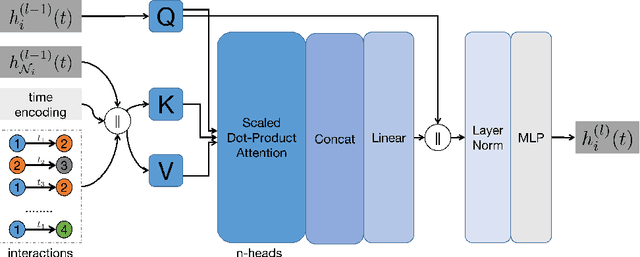
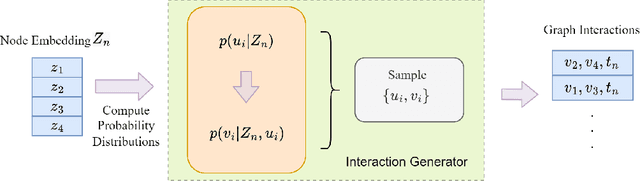
Efficient traffic management is crucial for maintaining urban mobility, especially in densely populated areas where congestion, accidents, and delays can lead to frustrating and expensive commutes. However, existing prediction methods face challenges in terms of optimizing a single objective and understanding the complex composition of the transportation system. Moreover, they lack the ability to understand the macroscopic system and cannot efficiently utilize big data. In this paper, we propose a novel approach, Transportation Foundation Model (TFM), which integrates the principles of traffic simulation into traffic prediction. TFM uses graph structures and dynamic graph generation algorithms to capture the participatory behavior and interaction of transportation system actors. This data-driven and model-free simulation method addresses the challenges faced by traditional systems in terms of structural complexity and model accuracy and provides a foundation for solving complex transportation problems with real data. The proposed approach shows promising results in accurately predicting traffic outcomes in an urban transportation setting.
Improving Federated Relational Data Modeling via Basis Alignment and Weight Penalty
Nov 23, 2020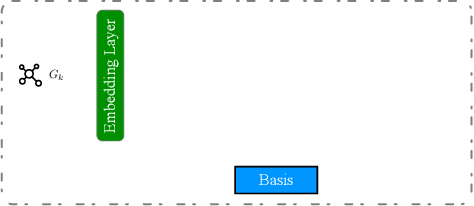
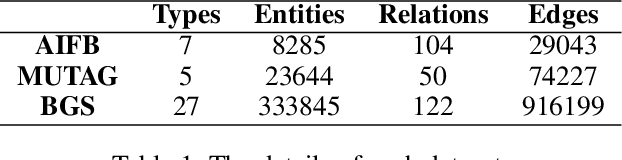
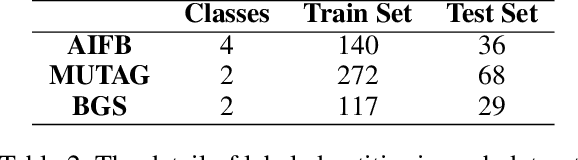
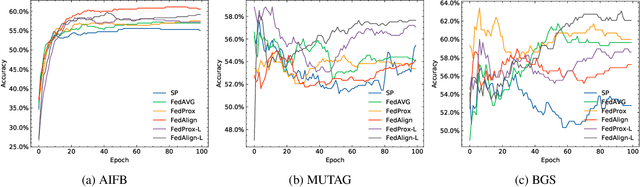
Federated learning (FL) has attracted increasing attention in recent years. As a privacy-preserving collaborative learning paradigm, it enables a broader range of applications, especially for computer vision and natural language processing tasks. However, to date, there is limited research of federated learning on relational data, namely Knowledge Graph (KG). In this work, we present a modified version of the graph neural network algorithm that performs federated modeling over KGs across different participants. Specifically, to tackle the inherent data heterogeneity issue and inefficiency in algorithm convergence, we propose a novel optimization algorithm, named FedAlign, with 1) optimal transportation (OT) for on-client personalization and 2) weight constraint to speed up the convergence. Extensive experiments have been conducted on several widely used datasets. Empirical results show that our proposed method outperforms the state-of-the-art FL methods, such as FedAVG and FedProx, with better convergence.
GPO: Global Plane Optimization for Fast and Accurate Monocular SLAM Initialization
May 24, 2020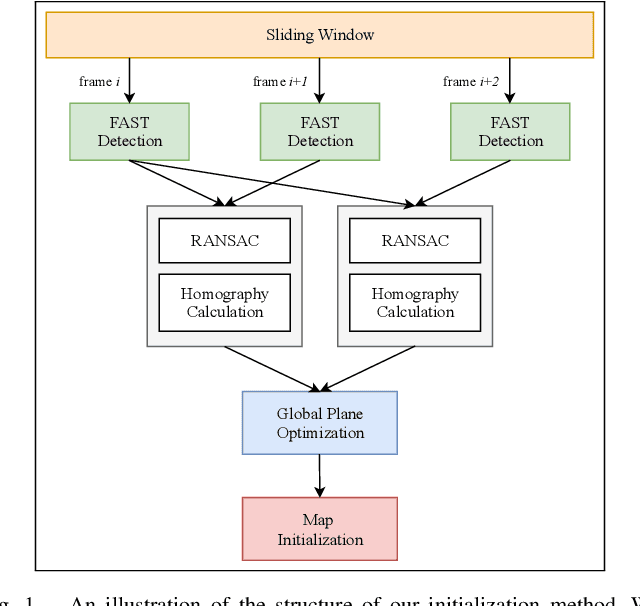
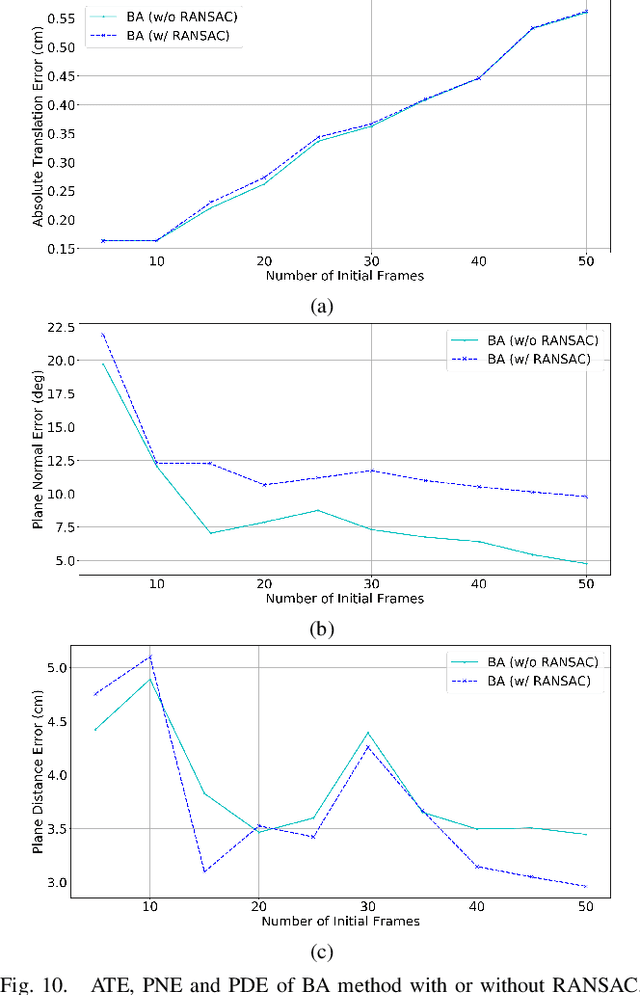
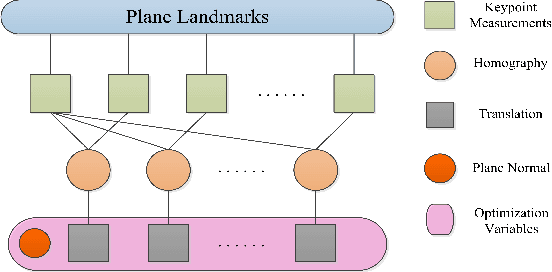
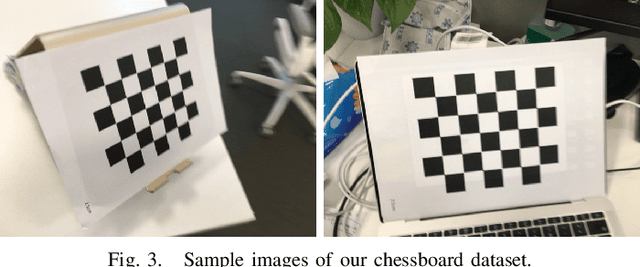
Initialization is essential to monocular Simultaneous Localization and Mapping (SLAM) problems. This paper focuses on a novel initialization method for monocular SLAM based on planar features. The algorithm starts by homography estimation in a sliding window. It then proceeds to a global plane optimization (GPO) to obtain camera poses and the plane normal. 3D points can be recovered using planar constraints without triangulation. The proposed method fully exploits the plane information from multiple frames and avoids the ambiguities in homography decomposition. We validate our algorithm on the collected chessboard dataset against baseline implementations and present extensive analysis. Experimental results show that our method outperforms the fine-tuned baselines in both accuracy and real-time.
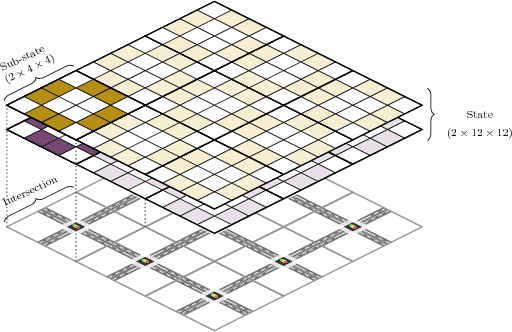
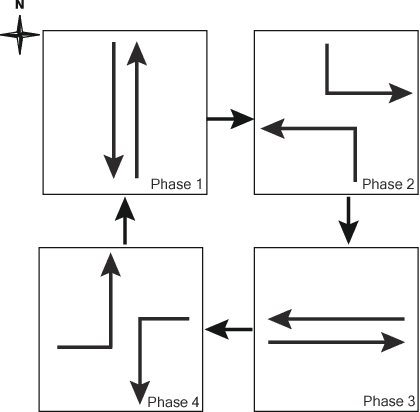
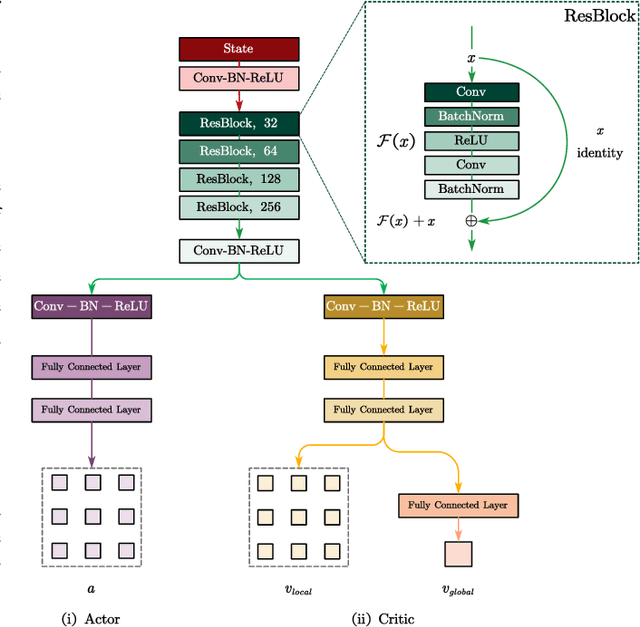
An Efficient Deep Reinforcement Learning Model for Urban Traffic Control
Aug 24, 2018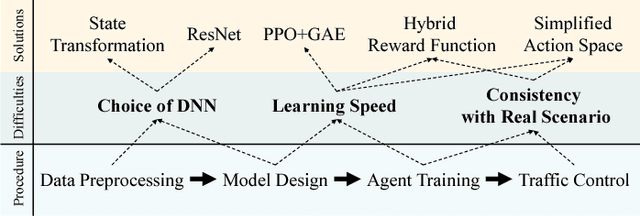
Urban Traffic Control (UTC) plays an essential role in Intelligent Transportation System (ITS) but remains difficult. Since model-based UTC methods may not accurately describe the complex nature of traffic dynamics in all situations, model-free data-driven UTC methods, especially reinforcement learning (RL) based UTC methods, received increasing interests in the last decade. However, existing DL approaches did not propose an efficient algorithm to solve the complicated multiple intersections control problems whose state-action spaces are vast. To solve this problem, we propose a Deep Reinforcement Learning (DRL) algorithm that combines several tricks to master an appropriate control strategy within an acceptable time. This new algorithm relaxes the fixed traffic demand pattern assumption and reduces human invention in parameter tuning. Simulation experiments have shown that our method outperforms traditional rule-based approaches and has the potential to handle more complex traffic problems in the real world.