 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLiDAR-GS++:Improving LiDAR Gaussian Reconstruction via Diffusion Priors
Nov 15, 2025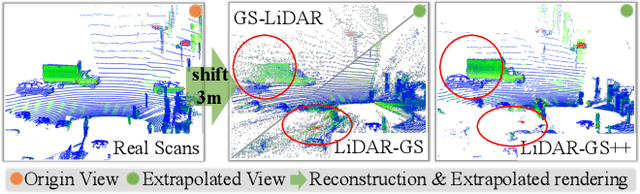
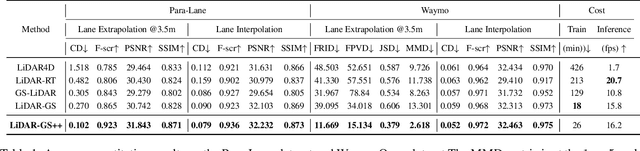
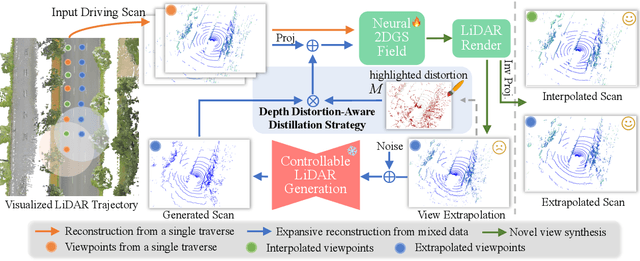
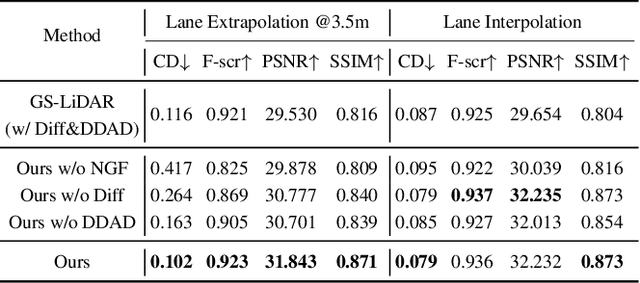
Recent GS-based rendering has made significant progress for LiDAR, surpassing Neural Radiance Fields (NeRF) in both quality and speed. However, these methods exhibit artifacts in extrapolated novel view synthesis due to the incomplete reconstruction from single traversal scans. To address this limitation, we present LiDAR-GS++, a LiDAR Gaussian Splatting reconstruction method enhanced by diffusion priors for real-time and high-fidelity re-simulation on public urban roads. Specifically, we introduce a controllable LiDAR generation model conditioned on coarsely extrapolated rendering to produce extra geometry-consistent scans and employ an effective distillation mechanism for expansive reconstruction. By extending reconstruction to under-fitted regions, our approach ensures global geometric consistency for extrapolative novel views while preserving detailed scene surfaces captured by sensors. Experiments on multiple public datasets demonstrate that LiDAR-GS++ achieves state-of-the-art performance for both interpolated and extrapolated viewpoints, surpassing existing GS and NeRF-based methods.
Industrial-Grade Sensor Simulation via Gaussian Splatting: A Modular Framework for Scalable Editing and Full-Stack Validation
Mar 14, 2025Sensor simulation is pivotal for scalable validation of autonomous driving systems, yet existing Neural Radiance Fields (NeRF) based methods face applicability and efficiency challenges in industrial workflows. This paper introduces a Gaussian Splatting (GS) based system to address these challenges: We first break down sensor simulator components and analyze the possible advantages of GS over NeRF. Then in practice, we refactor three crucial components through GS, to leverage its explicit scene representation and real-time rendering: (1) choosing the 2D neural Gaussian representation for physics-compliant scene and sensor modeling, (2) proposing a scene editing pipeline to leverage Gaussian primitives library for data augmentation, and (3) coupling a controllable diffusion model for scene expansion and harmonization. We implement this framework on a proprietary autonomous driving dataset supporting cameras and LiDAR sensors. We demonstrate through ablation studies that our approach reduces frame-wise simulation latency, achieves better geometric and photometric consistency, and enables interpretable explicit scene editing and expansion. Furthermore, we showcase how integrating such a GS-based sensor simulator with traffic and dynamic simulators enables full-stack testing of end-to-end autonomy algorithms. Our work provides both algorithmic insights and practical validation, establishing GS as a cornerstone for industrial-grade sensor simulation.
Para-Lane: Multi-Lane Dataset Registering Parallel Scans for Benchmarking Novel View Synthesis
Feb 21, 2025To evaluate end-to-end autonomous driving systems, a simulation environment based on Novel View Synthesis (NVS) techniques is essential, which synthesizes photo-realistic images and point clouds from previously recorded sequences under new vehicle poses, particularly in cross-lane scenarios. Therefore, the development of a multi-lane dataset and benchmark is necessary. While recent synthetic scene-based NVS datasets have been prepared for cross-lane benchmarking, they still lack the realism of captured images and point clouds. To further assess the performance of existing methods based on NeRF and 3DGS, we present the first multi-lane dataset registering parallel scans specifically for novel driving view synthesis dataset derived from real-world scans, comprising 25 groups of associated sequences, including 16,000 front-view images, 64,000 surround-view images, and 16,000 LiDAR frames. All frames are labeled to differentiate moving objects from static elements. Using this dataset, we evaluate the performance of existing approaches in various testing scenarios at different lanes and distances. Additionally, our method provides the solution for solving and assessing the quality of multi-sensor poses for multi-modal data alignment for curating such a dataset in real-world. We plan to continually add new sequences to test the generalization of existing methods across different scenarios. The dataset is released publicly at the project page: https://nizqleo.github.io/paralane-dataset/.
LiDAR-GS:Real-time LiDAR Re-Simulation using Gaussian Splatting
Oct 07, 2024



LiDAR simulation plays a crucial role in closed-loop simulation for autonomous driving. Although recent advancements, such as the use of reconstructed mesh and Neural Radiance Fields (NeRF), have made progress in simulating the physical properties of LiDAR, these methods have struggled to achieve satisfactory frame rates and rendering quality. To address these limitations, we present LiDAR-GS, the first LiDAR Gaussian Splatting method, for real-time high-fidelity re-simulation of LiDAR sensor scans in public urban road scenes. The vanilla Gaussian Splatting, designed for camera models, cannot be directly applied to LiDAR re-simulation. To bridge the gap between passive camera and active LiDAR, our LiDAR-GS designs a differentiable laser beam splatting, grounded in the LiDAR range view model. This innovation allows for precise surface splatting by projecting lasers onto micro cross-sections, effectively eliminating artifacts associated with local affine approximations. Additionally, LiDAR-GS leverages Neural Gaussian Fields, which further integrate view-dependent clues, to represent key LiDAR properties that are influenced by the incident angle and external factors. Combining these practices with some essential adaptations, e.g., dynamic instances decomposition, our approach succeeds in simultaneously re-simulating depth, intensity, and ray-drop channels, achieving state-of-the-art results in both rendering frame rate and quality on publically available large scene datasets. Our source code will be made publicly available.
GPO: Global Plane Optimization for Fast and Accurate Monocular SLAM Initialization
May 24, 2020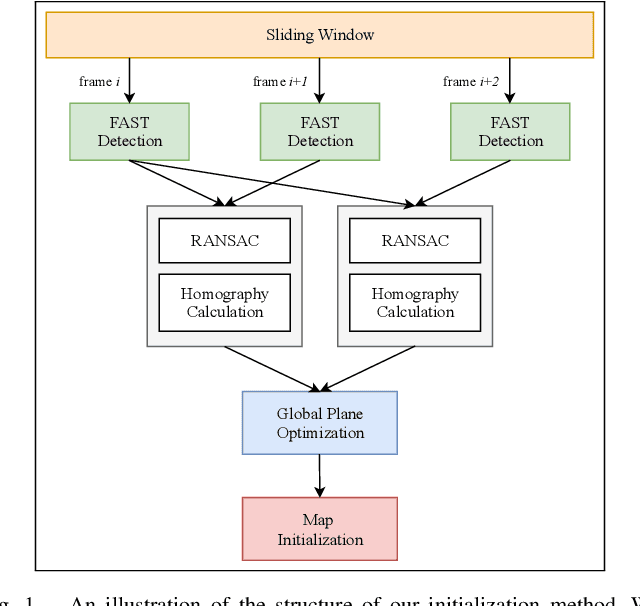
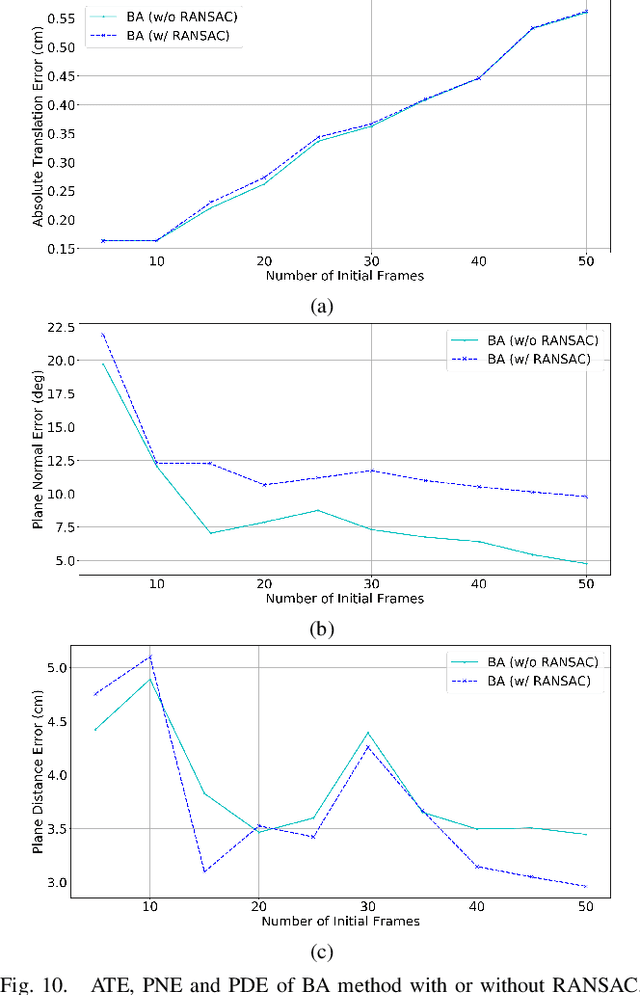
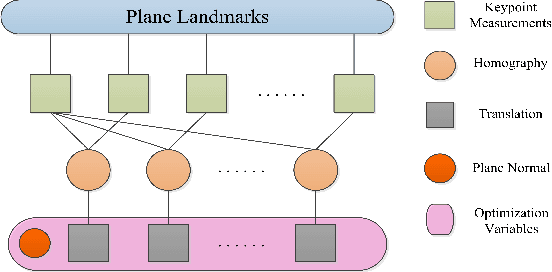
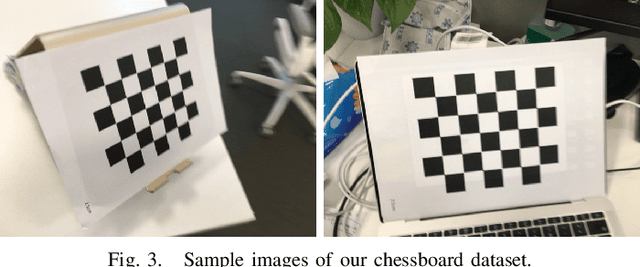
Initialization is essential to monocular Simultaneous Localization and Mapping (SLAM) problems. This paper focuses on a novel initialization method for monocular SLAM based on planar features. The algorithm starts by homography estimation in a sliding window. It then proceeds to a global plane optimization (GPO) to obtain camera poses and the plane normal. 3D points can be recovered using planar constraints without triangulation. The proposed method fully exploits the plane information from multiple frames and avoids the ambiguities in homography decomposition. We validate our algorithm on the collected chessboard dataset against baseline implementations and present extensive analysis. Experimental results show that our method outperforms the fine-tuned baselines in both accuracy and real-time.