 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Integrated Traffic Control with Operating Decentralized Autonomous Organization
Jul 25, 2023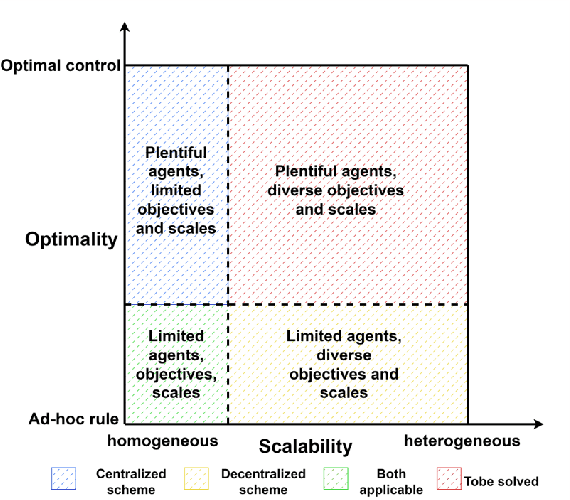
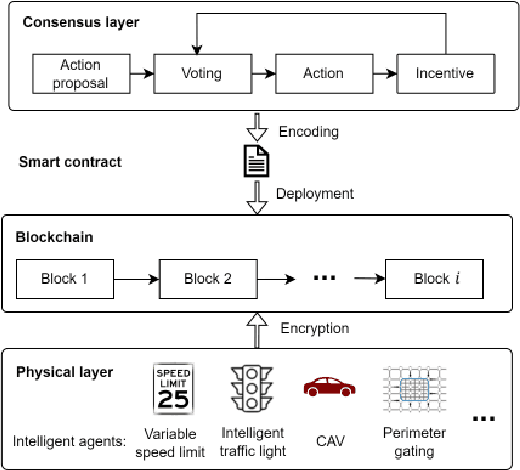
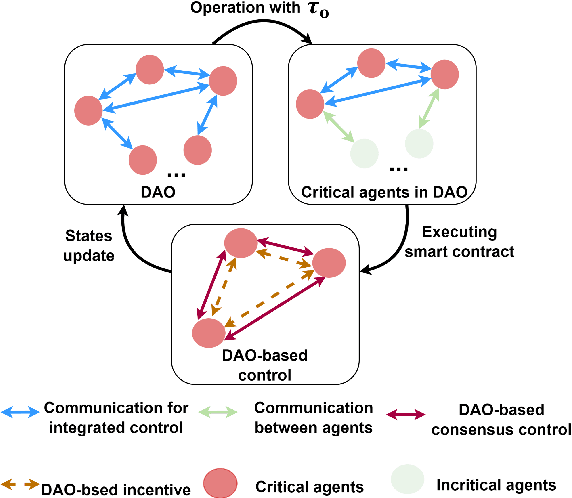
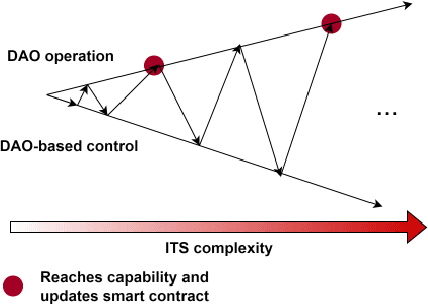
With a growing complexity of the intelligent traffic system (ITS), an integrated control of ITS that is capable of considering plentiful heterogeneous intelligent agents is desired. However, existing control methods based on the centralized or the decentralized scheme have not presented their competencies in considering the optimality and the scalability simultaneously. To address this issue, we propose an integrated control method based on the framework of Decentralized Autonomous Organization (DAO). The proposed method achieves a global consensus on energy consumption efficiency (ECE), meanwhile to optimize the local objectives of all involved intelligent agents, through a consensus and incentive mechanism. Furthermore, an operation algorithm is proposed regarding the issue of structural rigidity in DAO. Specifically, the proposed operation approach identifies critical agents to execute the smart contract in DAO, which ultimately extends the capability of DAO-based control. In addition, a numerical experiment is designed to examine the performance of the proposed method. The experiment results indicate that the controlled agents can achieve a consensus faster on the global objective with improved local objectives by the proposed method, compare to existing decentralized control methods. In general, the proposed method shows a great potential in developing an integrated control system in the ITS
TransWorldNG: Traffic Simulation via Foundation Model
May 25, 2023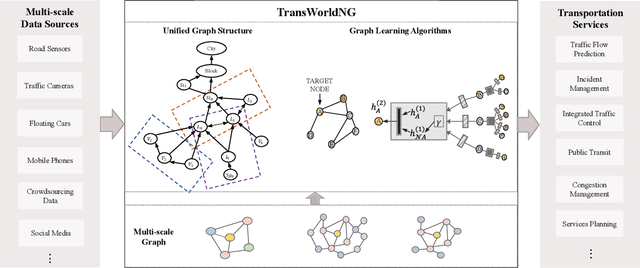
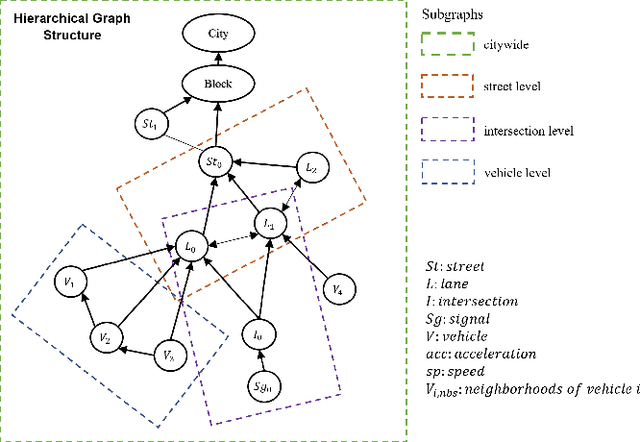
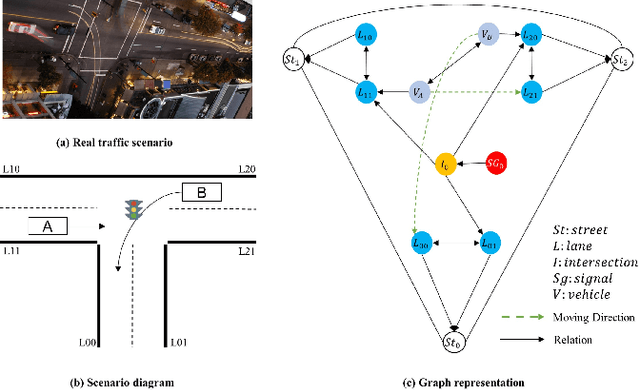
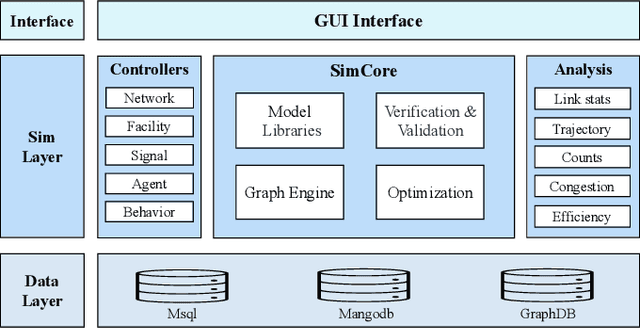
Traffic simulation is a crucial tool for transportation decision-making and policy development. However, achieving realistic simulations in the face of the high dimensionality and heterogeneity of traffic environments is a longstanding challenge. In this paper, we present TransWordNG, a traffic simulator that uses Data-driven algorithms and Graph Computing techniques to learn traffic dynamics from real data. The functionality and structure of TransWorldNG are introduced, which utilize a foundation model for transportation management and control. The results demonstrate that TransWorldNG can generate more realistic traffic patterns compared to traditional simulators. Additionally, TransWorldNG exhibits better scalability, as it shows linear growth in computation time as the scenario scale increases. To the best of our knowledge, this is the first traffic simulator that can automatically learn traffic patterns from real-world data and efficiently generate accurate and realistic traffic environments.
Mining Truck Platooning Patterns Through Massive Trajectory Data
Oct 11, 2020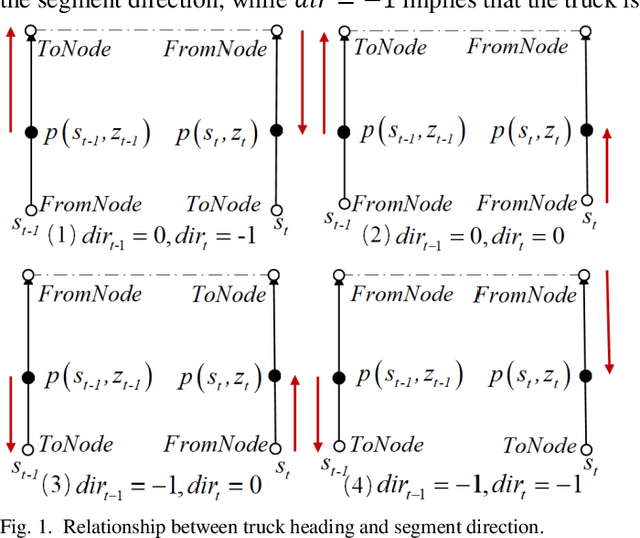


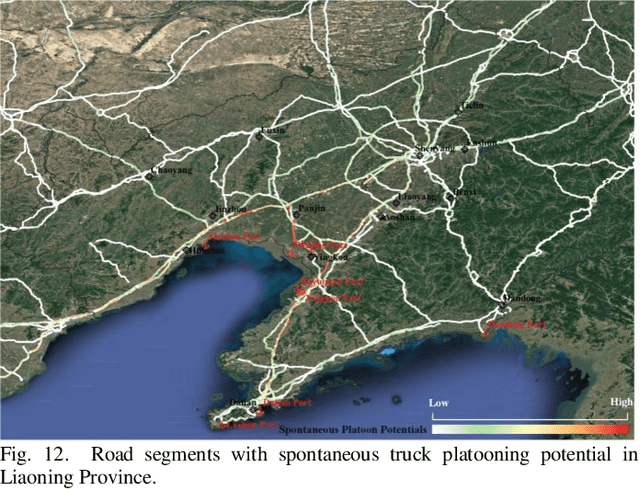
Truck platooning refers to a series of trucks driving in close proximity via communication technologies, and it is considered one of the most implementable systems of connected and automated vehicles, bringing huge energy savings and safety improvements. Properly planning platoons and evaluating the potential of truck platooning are crucial to trucking companies and transportation authorities. This study proposes a series of data mining approaches to learn spontaneous truck platooning patterns from massive trajectories. An enhanced map matching algorithm is developed to identify truck headings by using digital map data, followed by an adaptive spatial clustering algorithm to detect instantaneous co-moving truck sets. These sets are then aggregated to find the network-wide maximum platoon duration and size through frequent itemset mining for computational efficiency. We leverage real GPS data collected from truck fleeting systems in Liaoning Province, China, to evaluate platooning performance and successfully extract spatiotemporal platooning patterns. Results show that approximately 36% spontaneous truck platoons can be coordinated by speed adjustment without changing routes and schedules. The average platooning distance and duration ratios for these platooned trucks are 9.6% and 9.9%, respectively, leading to a 2.8% reduction in total fuel consumption. We also distinguish the optimal platooning periods and space headways for national freeways and trunk roads, and prioritize the road segments with high possibilities of truck platooning. The derived results are reproducible, providing useful policy implications and operational strategies for large-scale truck platoon planning and roadside infrastructure construction.