 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUsing Large Language Models to Tackle Fundamental Challenges in Graph Learning: A Comprehensive Survey
May 24, 2025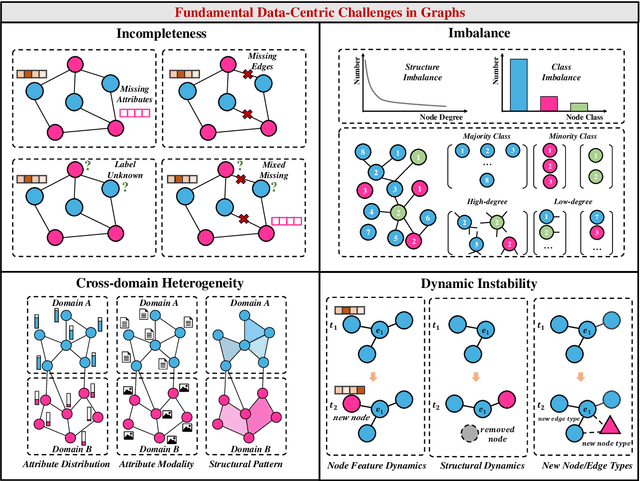
Graphs are a widely used paradigm for representing non-Euclidean data, with applications ranging from social network analysis to biomolecular prediction. Conventional graph learning approaches typically rely on fixed structural assumptions or fully observed data, limiting their effectiveness in more complex, noisy, or evolving settings. Consequently, real-world graph data often violates the assumptions of traditional graph learning methods, in particular, it leads to four fundamental challenges: (1) Incompleteness, real-world graphs have missing nodes, edges, or attributes; (2) Imbalance, the distribution of the labels of nodes or edges and their structures for real-world graphs are highly skewed; (3) Cross-domain Heterogeneity, graphs from different domains exhibit incompatible feature spaces or structural patterns; and (4) Dynamic Instability, graphs evolve over time in unpredictable ways. Recent advances in Large Language Models (LLMs) offer the potential to tackle these challenges by leveraging rich semantic reasoning and external knowledge. This survey provides a comprehensive review of how LLMs can be integrated with graph learning to address the aforementioned challenges. For each challenge, we review both traditional solutions and modern LLM-driven approaches, highlighting how LLMs contribute unique advantages. Finally, we discuss open research questions and promising future directions in this emerging interdisciplinary field. To support further exploration, we have curated a repository of recent advances on graph learning challenges: https://github.com/limengran98/Awesome-Literature-Graph-Learning-Challenges.
MM-STFlowNet: A Transportation Hub-Oriented Multi-Mode Passenger Flow Prediction Method via Spatial-Temporal Dynamic Graph Modeling
Apr 08, 2025Accurate and refined passenger flow prediction is essential for optimizing the collaborative management of multiple collection and distribution modes in large-scale transportation hubs. Traditional methods often focus only on the overall passenger volume, neglecting the interdependence between different modes within the hub. To address this limitation, we propose MM-STFlowNet, a comprehensive multi-mode prediction framework grounded in dynamic spatial-temporal graph modeling. Initially, an integrated temporal feature processing strategy is implemented using signal decomposition and convolution techniques to address data spikes and high volatility. Subsequently, we introduce the Spatial-Temporal Dynamic Graph Convolutional Recurrent Network (STDGCRN) to capture detailed spatial-temporal dependencies across multiple traffic modes, enhanced by an adaptive channel attention mechanism. Finally, the self-attention mechanism is applied to incorporate various external factors, further enhancing prediction accuracy. Experiments on a real-world dataset from Guangzhounan Railway Station in China demonstrate that MM-STFlowNet achieves state-of-the-art performance, particularly during peak periods, providing valuable insight for transportation hub management.
Learning dynamic and hierarchical traffic spatiotemporal features with Transformer
Apr 12, 2021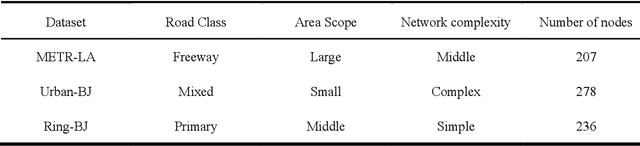

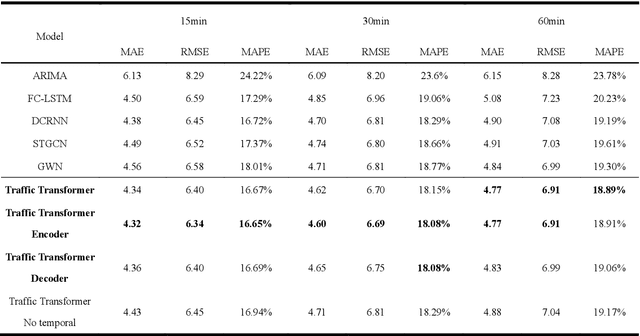
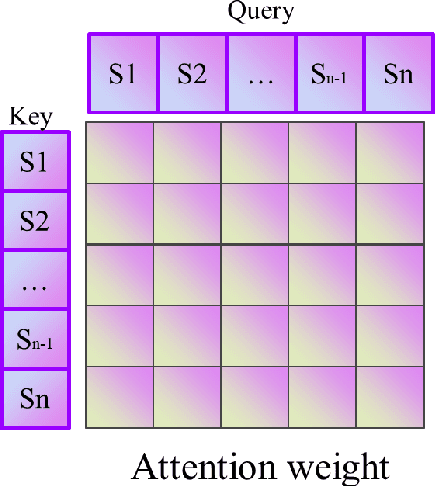
Traffic forecasting is an indispensable part of Intelligent transportation systems (ITS), and long-term network-wide accurate traffic speed forecasting is one of the most challenging tasks. Recently, deep learning methods have become popular in this domain. As traffic data are physically associated with road networks, most proposed models treat it as a spatiotemporal graph modeling problem and use Graph Convolution Network (GCN) based methods. These GCN-based models highly depend on a predefined and fixed adjacent matrix to reflect the spatial dependency. However, the predefined fixed adjacent matrix is limited in reflecting the actual dependence of traffic flow. This paper proposes a novel model, Traffic Transformer, for spatial-temporal graph modeling and long-term traffic forecasting to overcome these limitations. Transformer is the most popular framework in Natural Language Processing (NLP). And by adapting it to the spatiotemporal problem, Traffic Transformer hierarchically extracts spatiotemporal features through data dynamically by multi-head attention and masked multi-head attention mechanism, and fuse these features for traffic forecasting. Furthermore, analyzing the attention weight matrixes can find the influential part of road networks, allowing us to learn the traffic networks better. Experimental results on the public traffic network datasets and real-world traffic network datasets generated by ourselves demonstrate our proposed model achieves better performance than the state-of-the-art ones.
Mining Truck Platooning Patterns Through Massive Trajectory Data
Oct 11, 2020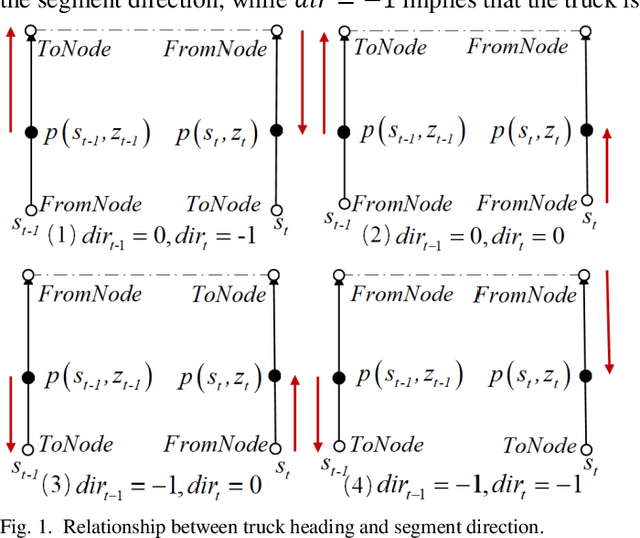


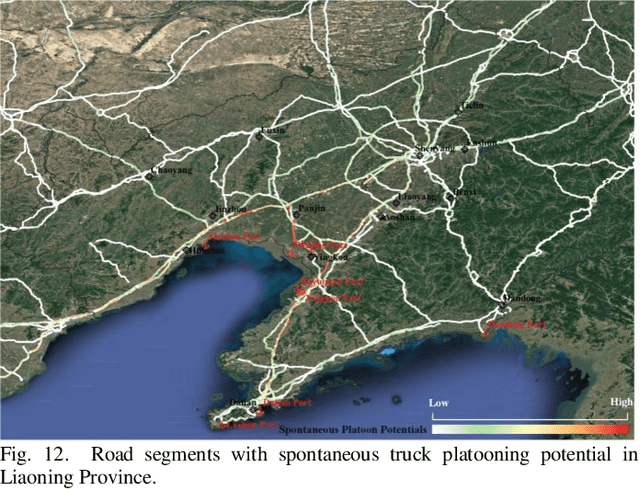
Truck platooning refers to a series of trucks driving in close proximity via communication technologies, and it is considered one of the most implementable systems of connected and automated vehicles, bringing huge energy savings and safety improvements. Properly planning platoons and evaluating the potential of truck platooning are crucial to trucking companies and transportation authorities. This study proposes a series of data mining approaches to learn spontaneous truck platooning patterns from massive trajectories. An enhanced map matching algorithm is developed to identify truck headings by using digital map data, followed by an adaptive spatial clustering algorithm to detect instantaneous co-moving truck sets. These sets are then aggregated to find the network-wide maximum platoon duration and size through frequent itemset mining for computational efficiency. We leverage real GPS data collected from truck fleeting systems in Liaoning Province, China, to evaluate platooning performance and successfully extract spatiotemporal platooning patterns. Results show that approximately 36% spontaneous truck platoons can be coordinated by speed adjustment without changing routes and schedules. The average platooning distance and duration ratios for these platooned trucks are 9.6% and 9.9%, respectively, leading to a 2.8% reduction in total fuel consumption. We also distinguish the optimal platooning periods and space headways for national freeways and trunk roads, and prioritize the road segments with high possibilities of truck platooning. The derived results are reproducible, providing useful policy implications and operational strategies for large-scale truck platoon planning and roadside infrastructure construction.
Spatiotemporal Recurrent Convolutional Networks for Traffic Prediction in Transportation Networks
May 07, 2017
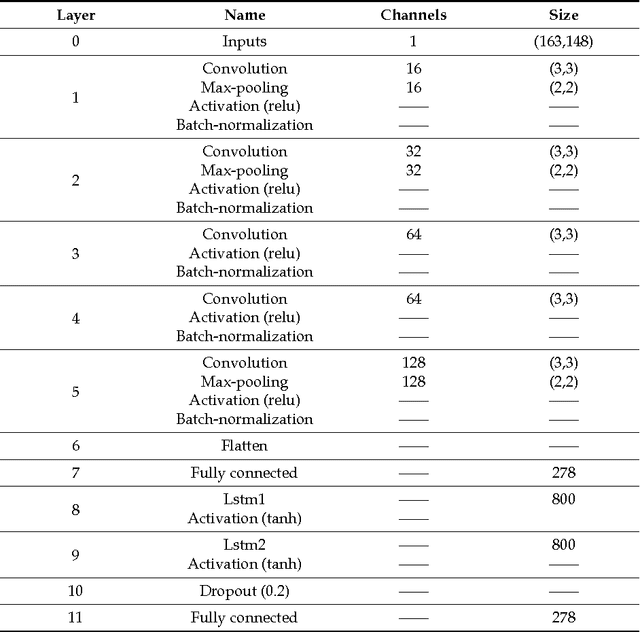
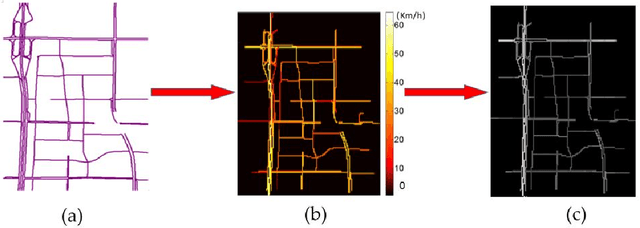

Predicting large-scale transportation network traffic has become an important and challenging topic in recent decades. Inspired by the domain knowledge of motion prediction, in which the future motion of an object can be predicted based on previous scenes, we propose a network grid representation method that can retain the fine-scale structure of a transportation network. Network-wide traffic speeds are converted into a series of static images and input into a novel deep architecture, namely, spatiotemporal recurrent convolutional networks (SRCNs), for traffic forecasting. The proposed SRCNs inherit the advantages of deep convolutional neural networks (DCNNs) and long short-term memory (LSTM) neural networks. The spatial dependencies of network-wide traffic can be captured by DCNNs, and the temporal dynamics can be learned by LSTMs. An experiment on a Beijing transportation network with 278 links demonstrates that SRCNs outperform other deep learning-based algorithms in both short-term and long-term traffic prediction.
Learning Traffic as Images: A Deep Convolutional Neural Network for Large-Scale Transportation Network Speed Prediction
Apr 10, 2017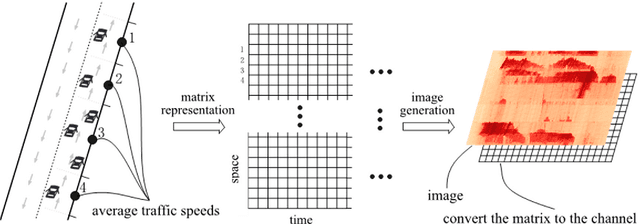



This paper proposes a convolutional neural network (CNN)-based method that learns traffic as images and predicts large-scale, network-wide traffic speed with a high accuracy. Spatiotemporal traffic dynamics are converted to images describing the time and space relations of traffic flow via a two-dimensional time-space matrix. A CNN is applied to the image following two consecutive steps: abstract traffic feature extraction and network-wide traffic speed prediction. The effectiveness of the proposed method is evaluated by taking two real-world transportation networks, the second ring road and north-east transportation network in Beijing, as examples, and comparing the method with four prevailing algorithms, namely, ordinary least squares, k-nearest neighbors, artificial neural network, and random forest, and three deep learning architectures, namely, stacked autoencoder, recurrent neural network, and long-short-term memory network. The results show that the proposed method outperforms other algorithms by an average accuracy improvement of 42.91% within an acceptable execution time. The CNN can train the model in a reasonable time and, thus, is suitable for large-scale transportation networks.