 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge1st Workshop on Maritime Computer Vision 2023: Challenge Results
Nov 28, 2022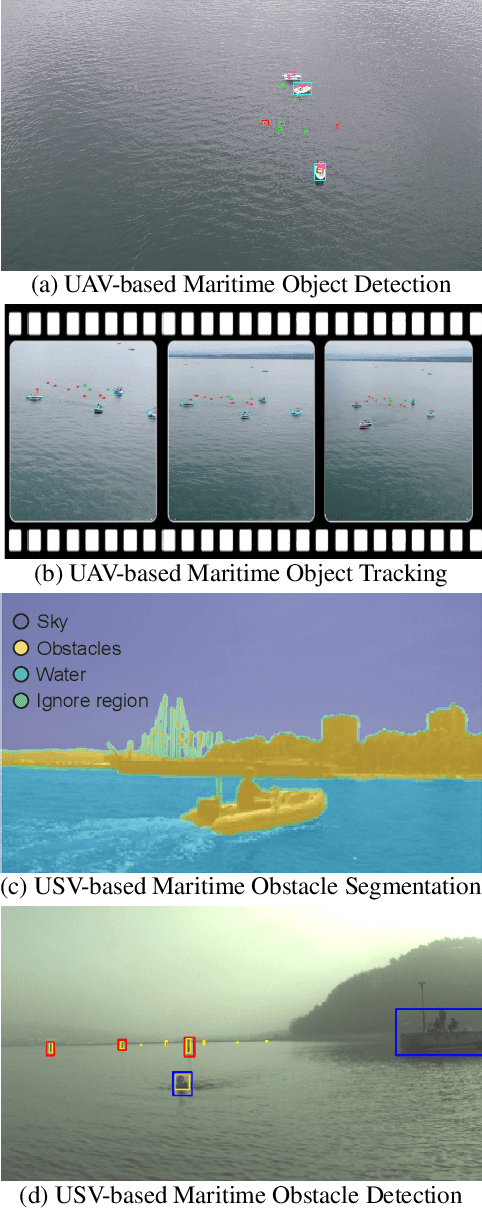
The 1$^{\text{st}}$ Workshop on Maritime Computer Vision (MaCVi) 2023 focused on maritime computer vision for Unmanned Aerial Vehicles (UAV) and Unmanned Surface Vehicle (USV), and organized several subchallenges in this domain: (i) UAV-based Maritime Object Detection, (ii) UAV-based Maritime Object Tracking, (iii) USV-based Maritime Obstacle Segmentation and (iv) USV-based Maritime Obstacle Detection. The subchallenges were based on the SeaDronesSee and MODS benchmarks. This report summarizes the main findings of the individual subchallenges and introduces a new benchmark, called SeaDronesSee Object Detection v2, which extends the previous benchmark by including more classes and footage. We provide statistical and qualitative analyses, and assess trends in the best-performing methodologies of over 130 submissions. The methods are summarized in the appendix. The datasets, evaluation code and the leaderboard are publicly available at https://seadronessee.cs.uni-tuebingen.de/macvi.
PAMI-AD: An Activity Detector Exploiting Part-attention and Motion Information in Surveillance Videos
Mar 08, 2022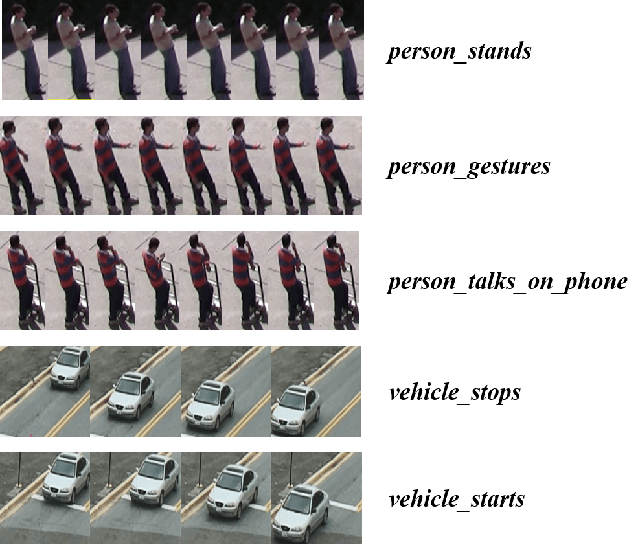
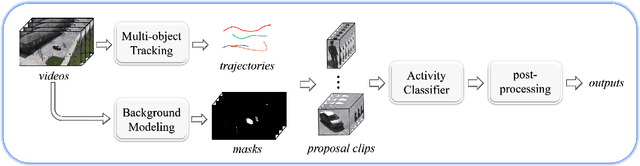
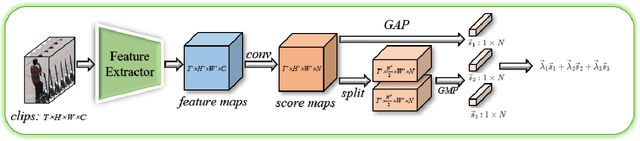

Activity detection in surveillance videos is a challenging task caused by small objects, complex activity categories, its untrimmed nature, etc. In this work, we propose an effective activity detection system for person-only and vehicle-only activities in untrimmed surveillance videos, named PAMI-AD. It consists of four modules, i.e., multi-object tracking, background modeling, activity classifier and post-processing. In particular, we propose a novel part-attention mechanism for person-only activities and a simple but strong motion information encoding method for vehicle-only activities. Our proposed system achieves the best results on the VIRAT dataset. Furthermore, our team won the 1st place in the TRECVID 2021 ActEV challenge.
StrongSORT: Make DeepSORT Great Again
Feb 28, 2022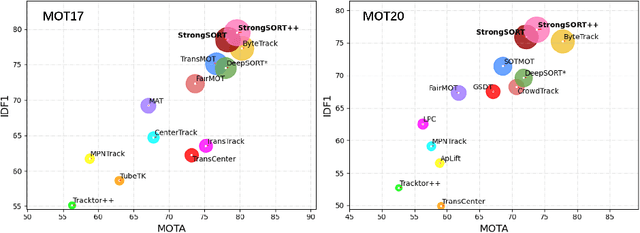
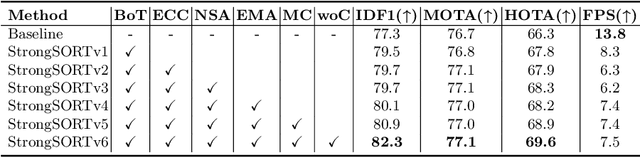
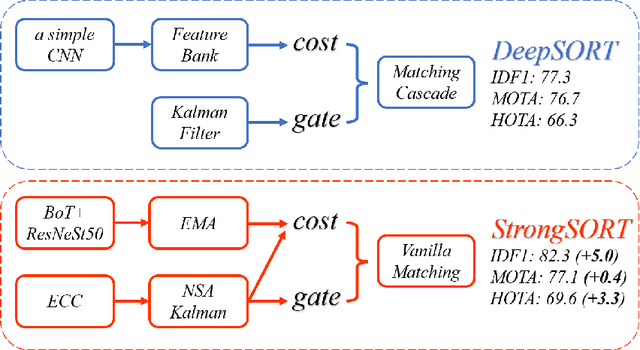
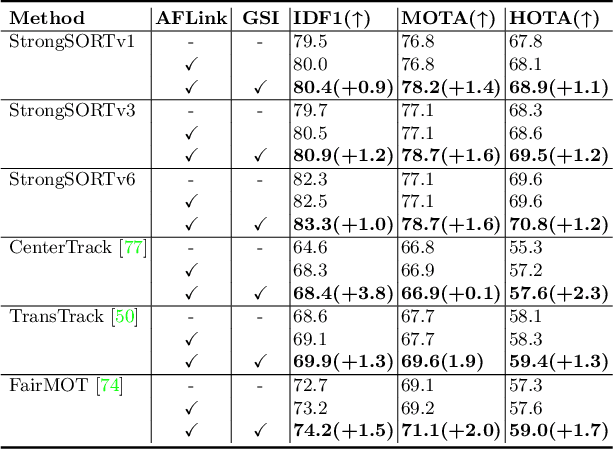
Existing Multi-Object Tracking (MOT) methods can be roughly classified as tracking-by-detection and joint-detection-association paradigms. Although the latter has elicited more attention and demonstrates comparable performance relative to the former, we claim that the tracking-by-detection paradigm is still the optimal solution in terms of tracking accuracy. In this paper, we revisit the classic tracker DeepSORT and upgrade it from various aspects, i.e., detection, embedding and association. The resulting tracker, called StrongSORT, sets new HOTA and IDF1 records on MOT17 and MOT20. We also present two lightweight and plug-and-play algorithms to further refine the tracking results. Firstly, an appearance-free link model (AFLink) is proposed to associate short tracklets into complete trajectories. To the best of our knowledge, this is the first global link model without appearance information. Secondly, we propose Gaussian-smoothed interpolation (GSI) to compensate for missing detections. Instead of ignoring motion information like linear interpolation, GSI is based on the Gaussian process regression algorithm and can achieve more accurate localizations. Moreover, AFLink and GSI can be plugged into various trackers with a negligible extra computational cost (591.9 and 140.9 Hz, respectively, on MOT17). By integrating StrongSORT with the two algorithms, the final tracker StrongSORT++ ranks first on MOT17 and MOT20 in terms of HOTA and IDF1 metrics and surpasses the second-place one by 1.3 - 2.2. Code will be released soon.
GIAOTracker: A comprehensive framework for MCMOT with global information and optimizing strategies in VisDrone 2021
Feb 24, 2022
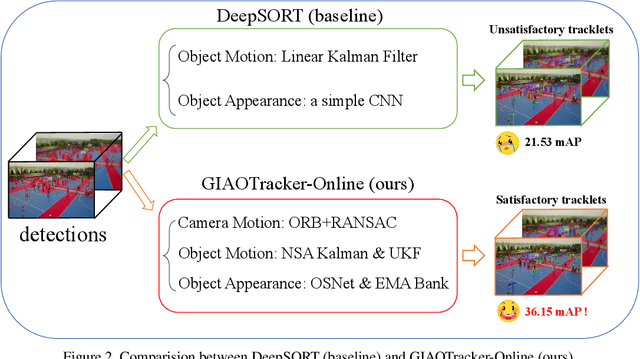
In recent years, algorithms for multiple object tracking tasks have benefited from great progresses in deep models and video quality. However, in challenging scenarios like drone videos, they still suffer from problems, such as small objects, camera movements and view changes. In this paper, we propose a new multiple object tracker, which employs Global Information And some Optimizing strategies, named GIAOTracker. It consists of three stages, i.e., online tracking, global link and post-processing. Given detections in every frame, the first stage generates reliable tracklets using information of camera motion, object motion and object appearance. Then they are associated into trajectories by exploiting global clues and refined through four post-processing methods. With the effectiveness of the three stages, GIAOTracker achieves state-of-the-art performance on the VisDrone MOT dataset and wins the 3rd place in the VisDrone2021 MOT Challenge.
* ICCV 2021 Workshop
VisDrone-CC2020: The Vision Meets Drone Crowd Counting Challenge Results
Jul 19, 2021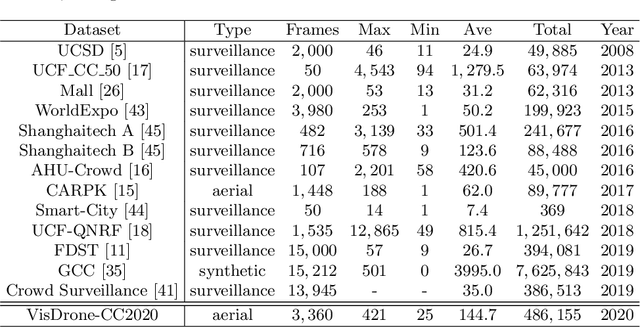
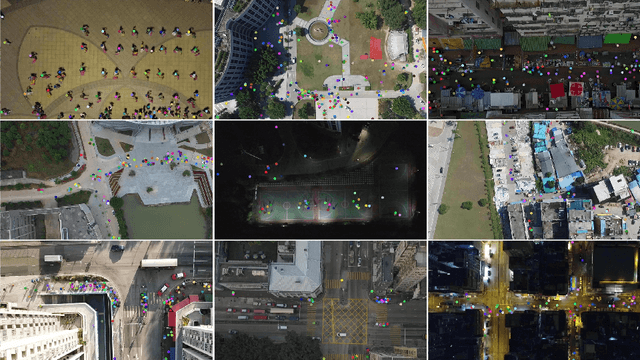
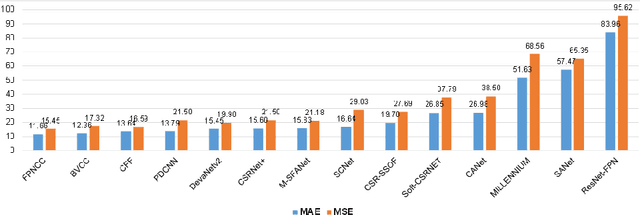
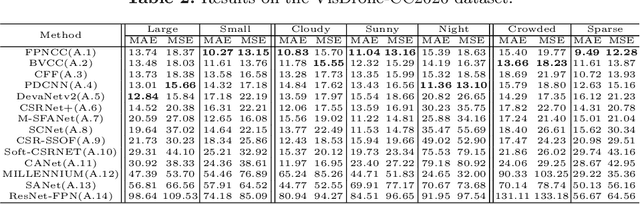
Crowd counting on the drone platform is an interesting topic in computer vision, which brings new challenges such as small object inference, background clutter and wide viewpoint. However, there are few algorithms focusing on crowd counting on the drone-captured data due to the lack of comprehensive datasets. To this end, we collect a large-scale dataset and organize the Vision Meets Drone Crowd Counting Challenge (VisDrone-CC2020) in conjunction with the 16th European Conference on Computer Vision (ECCV 2020) to promote the developments in the related fields. The collected dataset is formed by $3,360$ images, including $2,460$ images for training, and $900$ images for testing. Specifically, we manually annotate persons with points in each video frame. There are $14$ algorithms from $15$ institutes submitted to the VisDrone-CC2020 Challenge. We provide a detailed analysis of the evaluation results and conclude the challenge. More information can be found at the website: \url{http://www.aiskyeye.com/}.
* The method description of A7 Mutil-Scale Aware based SFANet (M-SFANet) is updated and missing references are added