 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge3rd Workshop on Maritime Computer Vision (MaCVi) 2025: Challenge Results
Jan 17, 2025The 3rd Workshop on Maritime Computer Vision (MaCVi) 2025 addresses maritime computer vision for Unmanned Surface Vehicles (USV) and underwater. This report offers a comprehensive overview of the findings from the challenges. We provide both statistical and qualitative analyses, evaluating trends from over 700 submissions. All datasets, evaluation code, and the leaderboard are available to the public at https://macvi.org/workshop/macvi25.
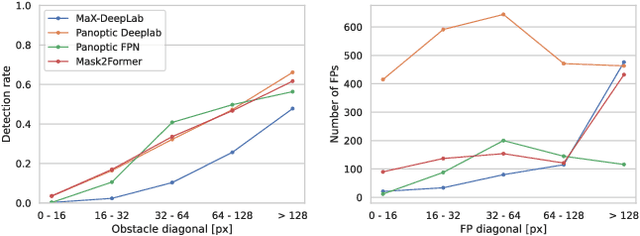
PanSR: An Object-Centric Mask Transformer for Panoptic Segmentation
Dec 13, 2024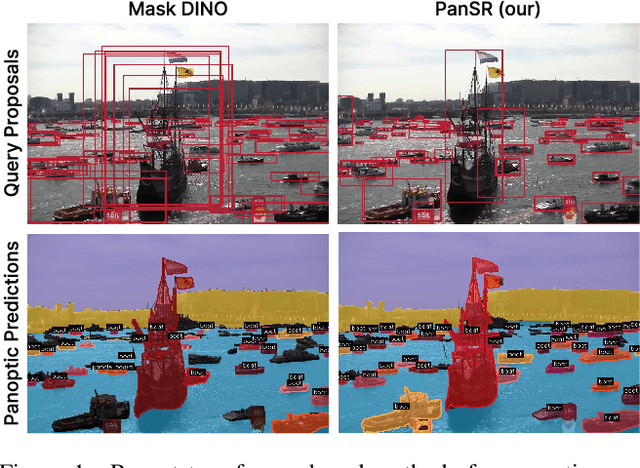
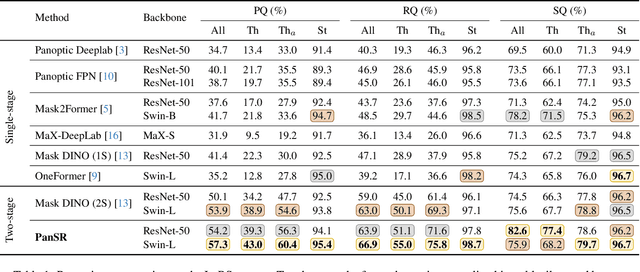
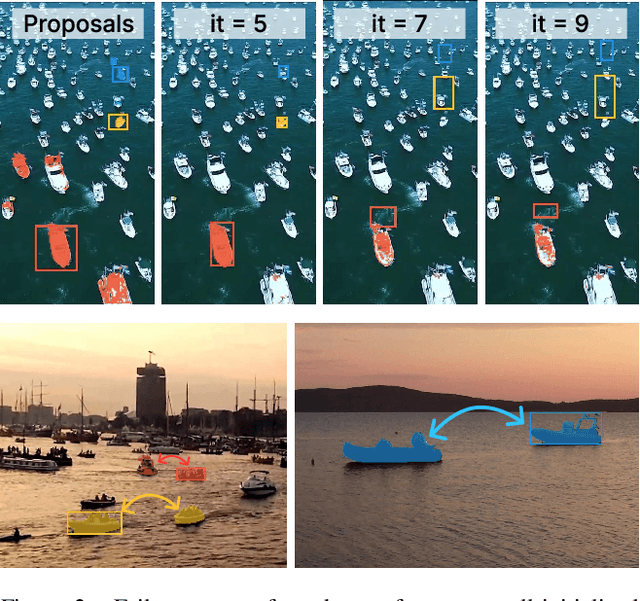

Panoptic segmentation is a fundamental task in computer vision and a crucial component for perception in autonomous vehicles. Recent mask-transformer-based methods achieve impressive performance on standard benchmarks but face significant challenges with small objects, crowded scenes and scenes exhibiting a wide range of object scales. We identify several fundamental shortcomings of the current approaches: (i) the query proposal generation process is biased towards larger objects, resulting in missed smaller objects, (ii) initially well-localized queries may drift to other objects, resulting in missed detections, (iii) spatially well-separated instances may be merged into a single mask causing inconsistent and false scene interpretations. To address these issues, we rethink the individual components of the network and its supervision, and propose a novel method for panoptic segmentation PanSR. PanSR effectively mitigates instance merging, enhances small-object detection and increases performance in crowded scenes, delivering a notable +3.4 PQ improvement over state-of-the-art on the challenging LaRS benchmark, while reaching state-of-the-art performance on Cityscapes. The code and models will be publicly available at https://github.com/lojzezust/PanSR.
The 2nd Workshop on Maritime Computer Vision 2024
Nov 23, 2023



The 2nd Workshop on Maritime Computer Vision (MaCVi) 2024 addresses maritime computer vision for Unmanned Aerial Vehicles (UAV) and Unmanned Surface Vehicles (USV). Three challenges categories are considered: (i) UAV-based Maritime Object Tracking with Re-identification, (ii) USV-based Maritime Obstacle Segmentation and Detection, (iii) USV-based Maritime Boat Tracking. The USV-based Maritime Obstacle Segmentation and Detection features three sub-challenges, including a new embedded challenge addressing efficicent inference on real-world embedded devices. This report offers a comprehensive overview of the findings from the challenges. We provide both statistical and qualitative analyses, evaluating trends from over 195 submissions. All datasets, evaluation code, and the leaderboard are available to the public at https://macvi.org/workshop/macvi24.
LaRS: A Diverse Panoptic Maritime Obstacle Detection Dataset and Benchmark
Aug 18, 2023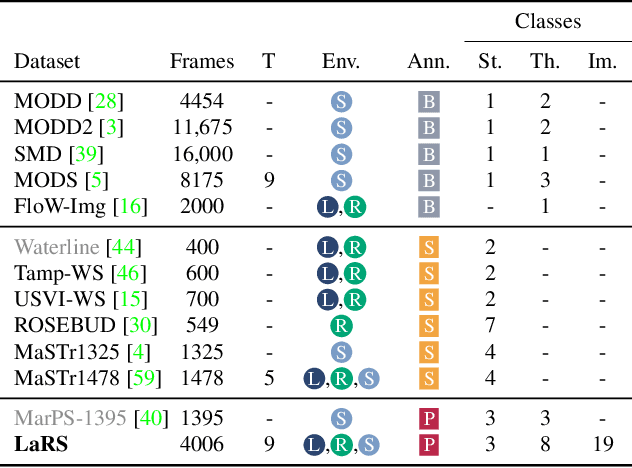
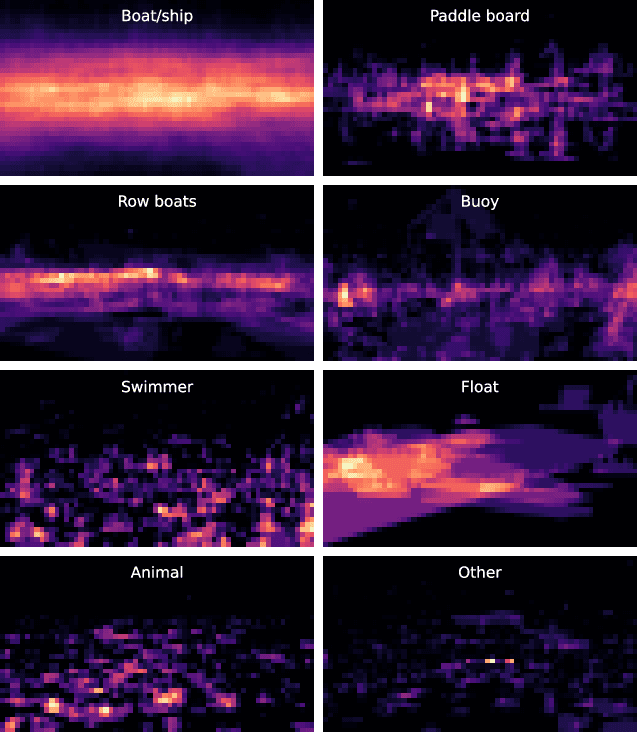
The progress in maritime obstacle detection is hindered by the lack of a diverse dataset that adequately captures the complexity of general maritime environments. We present the first maritime panoptic obstacle detection benchmark LaRS, featuring scenes from Lakes, Rivers and Seas. Our major contribution is the new dataset, which boasts the largest diversity in recording locations, scene types, obstacle classes, and acquisition conditions among the related datasets. LaRS is composed of over 4000 per-pixel labeled key frames with nine preceding frames to allow utilization of the temporal texture, amounting to over 40k frames. Each key frame is annotated with 8 thing, 3 stuff classes and 19 global scene attributes. We report the results of 27 semantic and panoptic segmentation methods, along with several performance insights and future research directions. To enable objective evaluation, we have implemented an online evaluation server. The LaRS dataset, evaluation toolkit and benchmark are publicly available at: https://lojzezust.github.io/lars-dataset
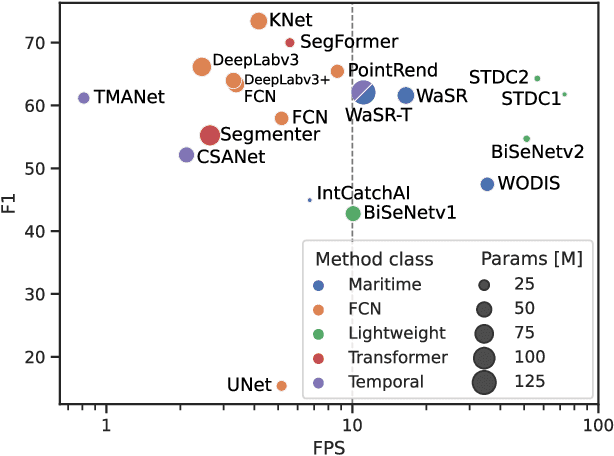
eWaSR -- an embedded-compute-ready maritime obstacle detection network
Apr 21, 2023



Maritime obstacle detection is critical for safe navigation of autonomous surface vehicles (ASVs). While the accuracy of image-based detection methods has advanced substantially, their computational and memory requirements prohibit deployment on embedded devices. In this paper we analyze the currently best-performing maritime obstacle detection network WaSR. Based on the analysis we then propose replacements for the most computationally intensive stages and propose its embedded-compute-ready variant eWaSR. In particular, the new design follows the most recent advancements of transformer-based lightweight networks. eWaSR achieves comparable detection results to state-of-the-art WaSR with only 0.52% F1 score performance drop and outperforms other state-of-the-art embedded-ready architectures by over 9.74% in F1 score. On a standard GPU, eWaSR runs 10x faster than the original WaSR (115 FPS vs 11 FPS). Tests on a real embedded device OAK-D show that, while WaSR cannot run due to memory restrictions, eWaSR runs comfortably at 5.5 FPS. This makes eWaSR the first practical embedded-compute-ready maritime obstacle detection network. The source code and trained eWaSR models are publicly available here: https://github.com/tersekmatija/eWaSR.
1st Workshop on Maritime Computer Vision 2023: Challenge Results
Nov 28, 2022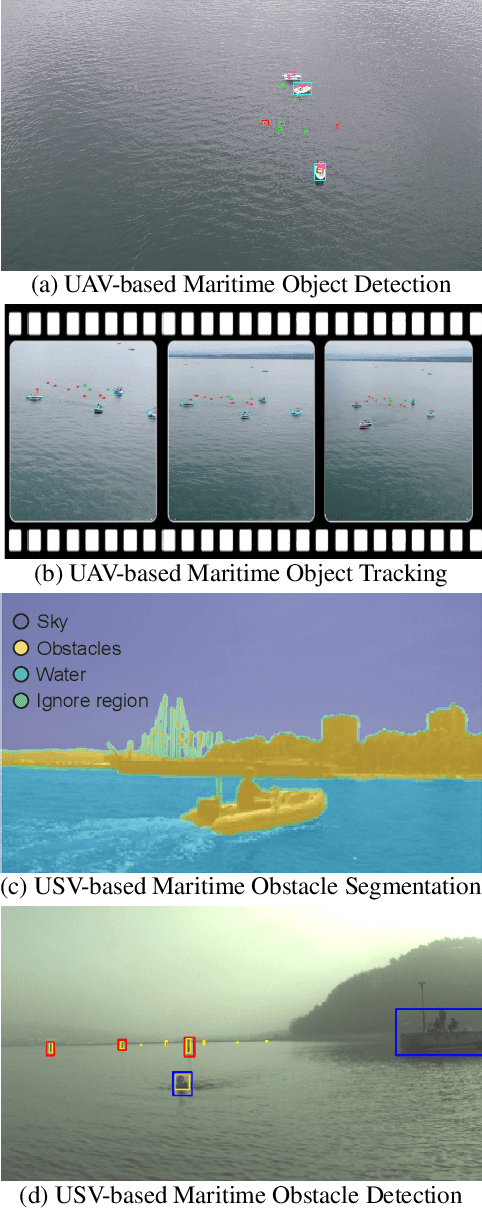
The 1$^{\text{st}}$ Workshop on Maritime Computer Vision (MaCVi) 2023 focused on maritime computer vision for Unmanned Aerial Vehicles (UAV) and Unmanned Surface Vehicle (USV), and organized several subchallenges in this domain: (i) UAV-based Maritime Object Detection, (ii) UAV-based Maritime Object Tracking, (iii) USV-based Maritime Obstacle Segmentation and (iv) USV-based Maritime Obstacle Detection. The subchallenges were based on the SeaDronesSee and MODS benchmarks. This report summarizes the main findings of the individual subchallenges and introduces a new benchmark, called SeaDronesSee Object Detection v2, which extends the previous benchmark by including more classes and footage. We provide statistical and qualitative analyses, and assess trends in the best-performing methodologies of over 130 submissions. The methods are summarized in the appendix. The datasets, evaluation code and the leaderboard are publicly available at https://seadronessee.cs.uni-tuebingen.de/macvi.
Learning with Weak Annotations for Robust Maritime Obstacle Detection
Jun 27, 2022
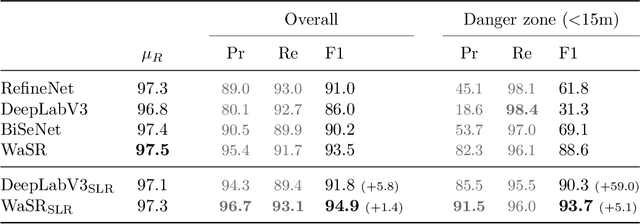
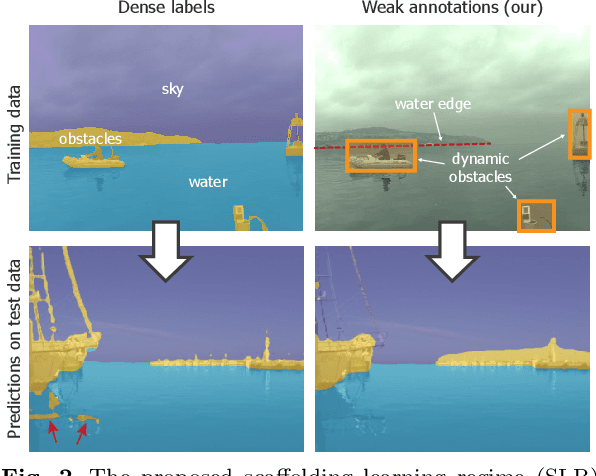
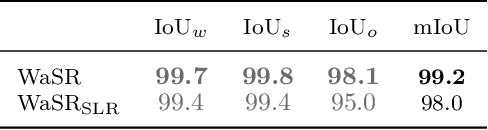
Robust maritime obstacle detection is crucial for safe navigation of autonomous boats and timely collision avoidance. The current state-of-the-art is based on deep segmentation networks trained on large datasets. Per-pixel ground truth labeling of such datasets, however, is labor-intensive and expensive. We propose a new scaffolding learning regime (SLR), that leverages weak annotations consisting of water edge, horizon and obstacle bounding boxes to train segmentation-based obstacle detection networks, and thus reduces the required ground truth labelling effort by twenty-fold. SLR trains an initial model from weak annotations, then alternates between re-estimating the segmentation pseudo labels and improving the network parameters. Experiments show that maritime obstacle segmentation networks trained using SLR on weak labels not only match, but outperform the same networks trained with dense ground truth labels, which is a remarkable result. In addition to increased accuracy, SLR also increases domain generalization and can be used for domain adaptation with a low manual annotation load. The code and pre-trained models are available at https://github.com/lojzezust/SLR .
Temporal Context for Robust Maritime Obstacle Detection
Mar 10, 2022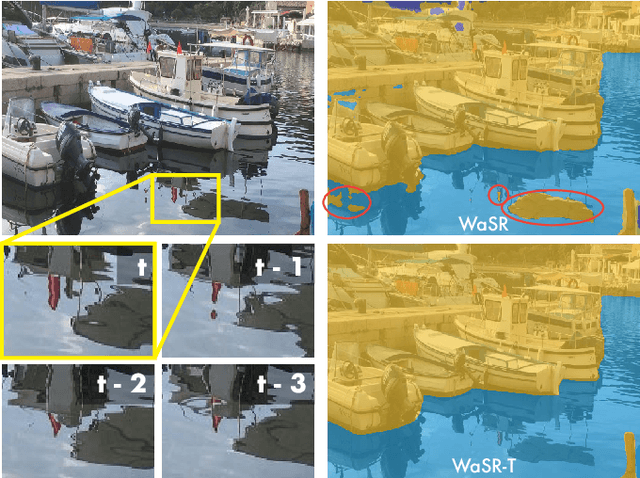
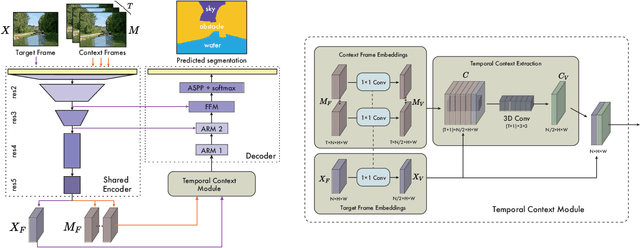
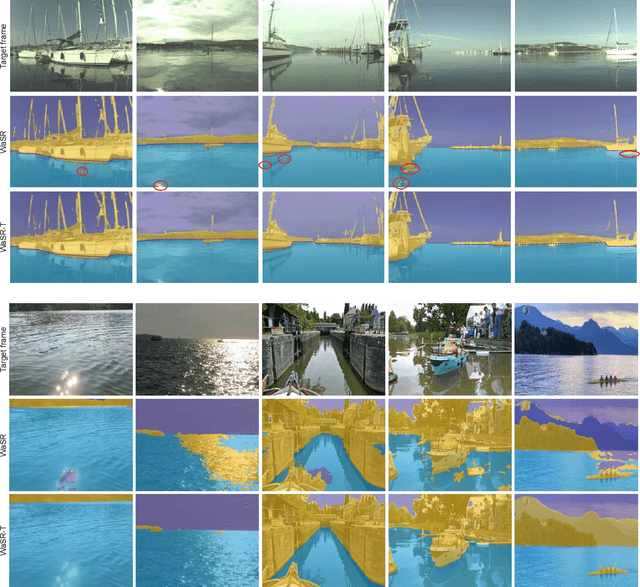
Robust maritime obstacle detection is essential for fully autonomous unmanned surface vehicles (USVs). The currently widely adopted segmentation-based obstacle detection methods are prone to misclassification of object reflections and sun glitter as obstacles, producing many false positive detections, effectively rendering the methods impractical for USV navigation. However, water-turbulence-induced temporal appearance changes on object reflections are very distinctive from the appearance dynamics of true objects. We harness this property to design WaSR-T, a novel maritime obstacle detection network, that extracts the temporal context from a sequence of recent frames to reduce ambiguity. By learning the local temporal characteristics of object reflection on the water surface, WaSR-T substantially improves obstacle detection accuracy in the presence of reflections and glitter. Compared with existing single-frame methods, WaSR-T reduces the number of false positive detections by 41% overall and by over 53% within the danger zone of the boat, while preserving a high recall, and achieving new state-of-the-art performance on the challenging MODS maritime obstacle detection benchmark.
Learning Maritime Obstacle Detection from Weak Annotations by Scaffolding
Aug 01, 2021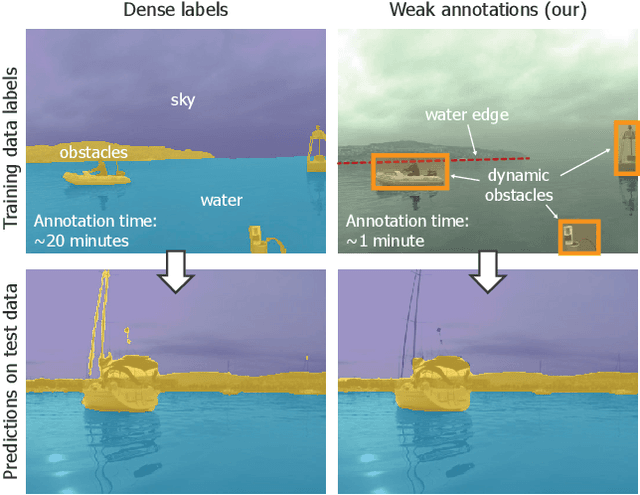
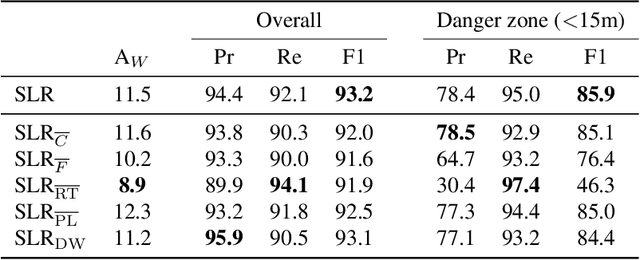
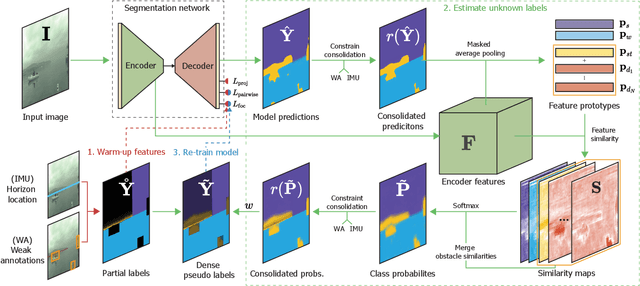
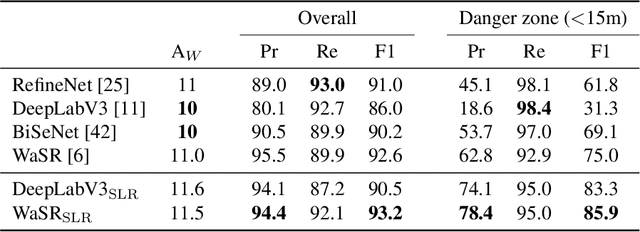
Coastal water autonomous boats rely on robust perception methods for obstacle detection and timely collision avoidance. The current state-of-the-art is based on deep segmentation networks trained on large datasets. Per-pixel ground truth labeling of such datasets, however, is labor-intensive and expensive. We observe that far less information is required for practical obstacle avoidance - the location of water edge on static obstacles like shore and approximate location and bounds of dynamic obstacles in the water is sufficient to plan a reaction. We propose a new scaffolding learning regime (SLR) that allows training obstacle detection segmentation networks only from such weak annotations, thus significantly reducing the cost of ground-truth labeling. Experiments show that maritime obstacle segmentation networks trained using SLR substantially outperform the same networks trained with dense ground truth labels. Thus accuracy is not sacrificed for labelling simplicity but is in fact improved, which is a remarkable result.