 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Maritime Obstacle Detection from Weak Annotations by Scaffolding
Paper and Code
Aug 01, 2021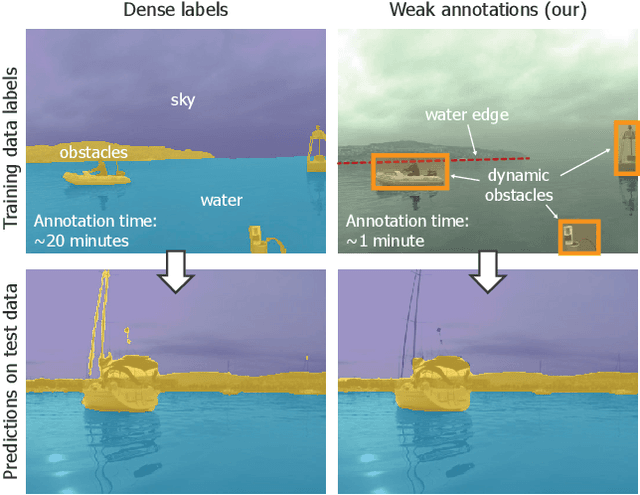
Coastal water autonomous boats rely on robust perception methods for obstacle detection and timely collision avoidance. The current state-of-the-art is based on deep segmentation networks trained on large datasets. Per-pixel ground truth labeling of such datasets, however, is labor-intensive and expensive. We observe that far less information is required for practical obstacle avoidance - the location of water edge on static obstacles like shore and approximate location and bounds of dynamic obstacles in the water is sufficient to plan a reaction. We propose a new scaffolding learning regime (SLR) that allows training obstacle detection segmentation networks only from such weak annotations, thus significantly reducing the cost of ground-truth labeling. Experiments show that maritime obstacle segmentation networks trained using SLR substantially outperform the same networks trained with dense ground truth labels. Thus accuracy is not sacrificed for labelling simplicity but is in fact improved, which is a remarkable result.